
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
1,521 - 1,540 / 2,058
ナビゲーション装置において使用するための改善された地図データを生成する方法
エンドユーザは、地図誤りに対する訂正を直接装置上に入力できる。装置は、訂正の外部処理なしで訂正を使用できる。従って、エンドユーザは、単にウェブリンクを介して誤りを地図メーカに報告して、その地図メーカが誤りを検証し、地図を更新し且つ更新データをエンドユーザに供給することを待つ必要がない。それが完了するのにかかる周期は、数ヶ月及び時には数年である。ナビゲーション装置は、訂正を迅速に使用できる。エンドユーザは、他のエンドユーザと訂正を共有でき、また訂正を集約し、検査し且つ配信する共有リモートサーバとも訂正を共有できる。 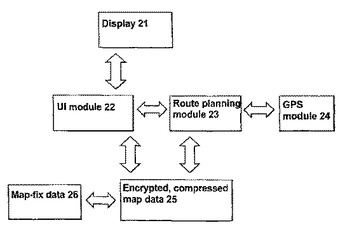 (もっと読む)
(もっと読む)
画像処理装置およびプログラム

【課題】交通状況の認識をしやすい画像を生成するための技術を提供する。
【解決手段】 ナビゲーション装置20は、路側カメラ10から取得した画像データで示される画像のうち、自車に対応する領域の表示態様を、他の領域の表示態様と異ならせてなるハイライト画像を生成する。このハイライト画像は、自車に対応する領域の表示態様が、他の領域と異なる表示態様となっているため、この表示態様の違いによって、そのハイライト画像における自車の位置を容易に識別できる状態になっている。そのため、このようなハイライト画像を表示することにより、ユーザは、ハイライト画像を長時間注視しなくても、表示態様の違いから自車の位置を直ちに認識することができ、その周辺における車両や歩行者の存在などといった交通状況を容易に認識することができる。
(もっと読む)
ナビゲーション装置、画像生成方法及び画像生成プログラム

【課題】撮影画像に案内用画像を合成した案内画面の視認性を向上させる。
【解決手段】まず、車両が案内ポイントに差し掛かった時点での外部状況を判定する(S101,S102,S104)。続いて、判定した外部状況に基づき、可視光カメラ及び赤外線カメラから車両の進行方向前方の撮影に最も適したカメラを選択する(S103,S105,S106)。そして、選択したカメラによる撮影画像に案内用画像を合成する(S107〜S111)。つまり、可視光カメラ及び赤外線カメラから外部状況に応じたカメラを選択し、その撮影画像に案内用画像を合成して表示させるようにしている。このため、明るさに応じた好適な撮影画像が得られることとなり、外部状況の影響による撮影画像の劣化を防ぐことができる。
(もっと読む)
車載用緊急通報システム
【課題】車両が、通過列車の接近する踏み切り内で身動きがとれない状態に陥ったことを正確に認識して、自動的に緊急通報を行うことのできる車載用緊急通報システムを提供する。
【解決手段】車載カメラにより取得した遮断状態の遮断機の画像により、車両が、通過列車の接近する踏み切り内に存在するか否かを判断する。そして存在すると判断したときに、ソナーにより取得した車両前後の障害物の距離および形状から、車両が前記踏み切り内から脱出可能であるかを判定し、脱出不可能であれば緊急機関に通報する。
(もっと読む)
ナビゲーション装置において使用するための改善された地図データを生成する方法
エンドユーザは、地図誤りに対する訂正を直接装置上に入力できる。装置は、訂正の外部処理なしで訂正を使用できる。従って、エンドユーザは、単にウェブリンクを介して誤りを地図メーカに報告して、その地図メーカが誤りを検証し、地図を更新し且つ更新データをエンドユーザに供給することを待つ必要がない。それが完了するのにかかる周期は、数ヶ月及び時には数年である。ナビゲーション装置は、訂正を迅速に使用できる。エンドユーザは、他のエンドユーザと訂正を共有でき、また訂正を集約し、検査し且つ配信する共有リモートサーバとも訂正を共有できる。 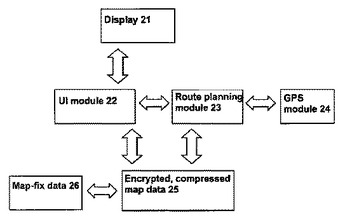 (もっと読む)
(もっと読む)
思い出情報提示システム
【課題】ユーザの思い出情報あるいは思い出連想情報を効果的に提示することで、より娯楽性の高い思い出情報提示システムを提供する。
【解決手段】ユーザの記憶を思い出させる効果がある音楽や画像のデータ(思い出情報)を日時情報と位置情報とに関連させてナビゲーション装置に記憶しておき、現在位置取得手段によって取得された現在位置が、前記位置情報が示す位置に近づいたことを判定すると、前記思い出情報を提示するとともに、前記思い出情報に関連された日時情報に基づいてユーザの体験を連想させる、前記思い出情報とは別の情報(思い出連想情報)を提示する。
(もっと読む)
画像変換装置および画像変換方法
【課題】低い演算負荷にて正確に他車両を検出することができなかった。
【解決手段】自車両の進入先の車線を含む画像を取得し、前記自車両の進行方向と前記進入先の車線との角度を取得し、前記画像を俯瞰画像に変換するにあたり、前記角度に基づいて前記進入先の車線を前記俯瞰画像内で特定の方向に向ける変換処理を特定し、この変換処理によって俯瞰画像を取得する。
(もっと読む)
車両制御装置
【課題】運転者に車両の運転が困難な緊急異常状態が発生した場合においても、自車両を安全に停車させることが可能となるように制御する車両制御装置を提供する。
【解決手段】CPU41は、スピーカ16を介して呼びかけを行っても、マイク18を介して運転者の応答が無い場合には、運転者の意識が無いと判定する(S1〜S2:YES)。そして、CPU41は、地図情報DB25に格納されるナビ地図情報と自車位置データから、車両2が一番左側の車線を走行している場合には(S5:YES)、車両ECU71を介してブレーキランプや左側方向指示器のランプ類を点滅点灯する等して、周囲の他車両に対して、車両2に緊急異常状態が発生して緊急停車する旨をアピールしながら、車両ECU71を介してブレーキ73、エンジン74、変速機75やステアリング駆動部76を駆動制御して当該車両2を道路の左側端縁に緊急停車させる(S6〜S8)。
(もっと読む)
ナビゲーション装置において使用するための改善された地図データを生成する方法
ナビゲーション装置上で地図変更を作成する方法を説明する。方法は、地図を装置上にロードするステップと、可能な変更のメニュー駆動選択を提供するステップと、それら変更のうち少なくとも1つを含む入力を受信するステップと、それら変更のうち少なくとも1つを含む地図訂正を生成するステップとを含む。 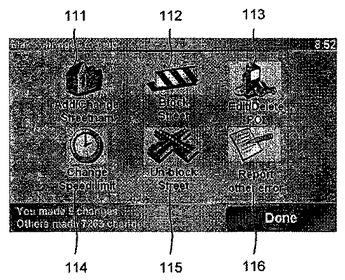 (もっと読む)
(もっと読む)
データ構造及びそれを利用したナビゲーションシステム
【課題】ナビゲーションシステムにかかる負荷を小さくすることで、認識対象地物を検出したときに、認識対象地物から制御対象地物までの距離を、迅速に出力できるデータ構造を提供する。
【解決手段】制御対象地物の座標データと、認識対象地物を認識すべき制御対象道路を規定する制御対象道路データと、制御対象道路内に存在する認識対象地物を認識するための認識対象地物データと、制御対象地物から認識対象地物まで距離を規定する距離データと、を備え、座標データ、制御対象道路データ、認識対象地物データ、及び距離データが制御対象地物毎に関連付けられている。
(もっと読む)
車両用情報表示装置
【課題】仮想先行車両を利用して運転支援を行う場合に、運転負担の軽減をより一層効果的に行えるようにする。
【解決手段】フロントウインドガラスの前方に、走行経路に対応して仮想先行車両の画像を表示して、運転支援が行われる。仮想先行車両は、走行経路に沿って縦列状に表示された複数台とされる。複数の仮想先行車両としては、例えば、互いに異なる運転キャラクタを有するように設定したり、予測される自車両の走行状態に設定することができ、また2輪車を含めることもできる。
(もっと読む)
道路地図更新システムおよびその道路地図更新システムに用いる車両側装置
【課題】道路地図データをより有用な内容に逐次更新することができる道路地図更新システム用の車両側装置を提供する。
【解決手段】新規道路判定手段112により、走行中の道路が新規道路であるか否かを判定して、新規道路である場合の走行軌跡と、新規道路を走行中に車載カメラ14によって撮像した車両周囲の画像とを地図管理装置へ送信する。地図管理装置は、走行軌跡から新規道路の形状を決定することができる。また、画像を解析することにより、新規道路のより詳細な情報および新規道路の周辺にどのような施設が存在するかも決定することができる。これら画像解析から得られる情報も含めてセンタ側道路地図データを更新しているので、センタ側道路地図データがより有用なものとなる。また、画像データを送信するのは、その画像データが天候情報に基づいて地図更新に使用可能と判定できた場合に限られるので、データを送信する回数が減少する。
(もっと読む)
車両用情報提供装置
【課題】ドライバに対して適切な情報提供をすることができる車両用情報提供装置を提供する。
【解決手段】ドライバの運転行動によって変化する注意対象領域や、その注意対象領域の視認完了時間等に対応した視認完了判定条件に従って、ドライバに対する警告が必要か否かを判断し、警告が必要である場合には注意対象領域に対応付けた警告ランクに応じた警告を発生する。
(もっと読む)
情報提供装置、情報提供方法、情報提供プログラム、および記録媒体
【課題】操作者が必要とする情報を安全かつ簡単に提供すること。
【解決手段】移動体が移動を開始した場合には、第1の取得部101および第2の取得部102によってそれぞれ該当する画像情報を取得し、取得された画像情報および地図情報を用いて、当該地図情報の中から移動体の周囲の画像情報に対して同一性を有する地図情報を抽出部106によって抽出し、抽出された地図情報の中から移動体の周囲の画像情報における操作者の視点の位置に一致する対象物を選択部107によって選択する。そして、選択された対象物に関する情報を出力部108によって出力する。
(もっと読む)
障害物認識装置
【課題】より誤検出を少なくして障害物を認識できる障害物認識装置を提供する。
【解決手段】走行支援システム1はECU10からなり、ECU10は、ナビゲーションシステム12、前方ミリ波レーダ30等が接続された物体検出部100を備える。走行レーン認識部110が、ナビゲーションシステム12の測定結果から自車が走行する走行レーンを認識して自車のいずれかの側に他車が存在する可能性を判断し、レーダ波検出部102は走行レーン認識部110が自車のいずれかの側に他車が存在する可能性が無いと判断したときは、当該側について前方ミリ波レーダ30及び近距離ミリ波レーダ32の反射率が通常の第1閾値より高い第2閾値以上のときに物体を障害物として抽出する。そのため、ガードレールや側壁等の路側物を車両として誤検出する可能性を低減し、より誤検出を少なくして障害物を認識することができる。
(もっと読む)
車載用ナビゲーション装置
【課題】走行経路上に存在する障害物を特定した際に、ユーザに最善な回避策を指示することが可能な車載用ナビゲーション装置を提供する。
【解決手段】走行経路上に存在する障害物を回避するための走行誘導案として、現在設定中の走行経路を変更せず、走行レーンは変更することにより障害物を回避するレーン変更型誘導案と、現在設定中の走行経路から障害物を迂回可能な代替走行経路へ変更することにより障害物を回避する経路変更型誘導案と、現在設定中の走行経路上にて障害物を回避せずレーンキープして走行継続する非回避型走行誘導案とを含む複数の走行誘導案を、電子道路地図の情報に基づいて作成し、各走行誘導案についての車両のユーザの運転負担度を反映した運転負担度情報を作成し、その内容比較に基づいて、これら走行誘導案の中から推奨走行誘導案を決定してユーザに報知する報知手段と、を備えることを特徴とする車載用ナビゲーション装置として提供可能である。
(もっと読む)
車両の運転支援制御装置および方法
【課題】カメラ等を用いた前方認識装置2の出力情報に基く運転支援を、前方の道路形状により見通しが悪くても、安全に実行できる車両の運転支援装置を実現すること。
【解決手段】ナビゲーション装置1と、車両周辺の状況を撮影し特定の対象物までの距離と相対速度を算出できるカメラ等を用いた前方認識装置2と、車両走行状態を取得する車両に搭載されているセンサ群とを備え、前記ナビ装置1または前記カメラ等を用いた前方認識装置2から得られた走行環境情報によって、前記カメラ等を用いた前方認識装置の出力情報を基にした運転支援制御を継続するか中断するかを判定する。もし、それらセンサ群の情報により視認性が悪いと判断した場合は前記前方認識装置の出力情報を基にした運転支援制御を中断する。
(もっと読む)
自己位置推定装置
【課題】 ランドマークが低い位置に設定されていたり、検出されるランドマークの数が少なかったりする場合でも、高い精度で自己位置を推定することができる自己推定装置を提供する。
【解決手段】 自己位置推定装置1は、ステレオカメラ2と自己位置推定ECU3を備える。自己位置推定ECU3は、ステレオカメラ2で撮影された画像からランドマークを抽出するとともに、自己位置からランドマークまでの距離を算出する。この抽出されたランドマークおよびランドマークまでの距離に基づいて、自己が存在可能である自己存在可能範囲を推定する。このとき、自己位置からランドマークまでの距離が短い場合には、自己位置からランドマークまでの距離が長い場合と比較して、自己存在可能範囲を狭く推定する。
(もっと読む)
運転支援装置、運転支援プログラム、及び運転支援方法
【課題】 運転情報の提示の態様をより一層工夫した運転支援装置を提供する。
【解決手段】 車両に設置されたカメラにより撮影されたカメラ画像を含み、場合によって撮影時の当該車両の位置を示すGPS情報を含むことがある運転情報をメモリカード230から取得し、取得された運転情報がGPS情報を含むか否かを判別し(ステップS920)、判別の結果、GPS情報を含む場合、表示装置の第1表示領域に前記GPS情報が示す位置を記した地図画像を作成して表示し、その上に前記第1表示領域の一部と重なる第2領域であって、少なくとも前記地図画像上に記された前記GPS情報の位置を含まない第2領域に、カメラ画像を表示し(ステップS940、950)、GPS情報を含まない場合、前記第1表示領域にカメラ画像を表示する(ステップS960)。
(もっと読む)
車両用表示システム、ナビゲーションシステム
【課題】自車両と周囲の状況を把握容易に表示する現在位置表示システムを提供すること。
【解決手段】撮影手段を備えた路側装置から所定の撮影範囲の元画像を車両に送信する現在位置表示システムであって、車両は、該車両の位置を検出する位置検出手段14aと、道路地図を記憶した道路地図記憶手段15と、位置を含む道路地図を地図記憶手段から抽出して該車両の位置を示すマークと共に表示装置に表示する道路地図表示手段14dと、元画像を路面に略垂直な視点の平面画像に視点変換する画像変換手段14bと、平面画像を道路地図における前記撮影範囲に重畳すると共に、前記平面画像に撮影されている該車両に前記マークを重畳して表示する画像重畳手段14cと、を有することを特徴とする。
(もっと読む)
1,521 - 1,540 / 2,058
[ Back to top ]