
Fターム[2F129GG18]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | レーダー (471)
Fターム[2F129GG18]に分類される特許
141 - 160 / 471
走行支援装置
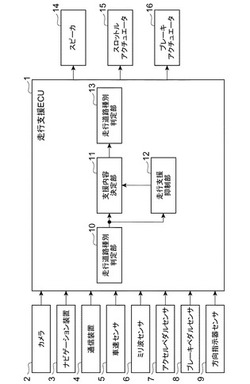
【課題】 ナビゲーション装置で得られた情報から判定された道路種別に対して、その道路種別に応じた適正な走行支援を行うことができる走行支援装置を提供する。
【解決手段】 本発明の走行支援ECU1における走行道路種別判定部10では、ナビゲーション情報に基づいて判断した自車両の走行路の道路種別であるナビ情報道路種別に応じたナビ道路種別信号を生成する。走行支援抑制部12では、走行道路種別判定部10から出力されたナビ道路種別信号や各種信号に基づいて、走行支援の抑制を判断する。支援内容決定部11では、自車両に対する支援内容を決定する。また、支援内容決定部11は、走行支援抑制部12から支援抑制信号が出力された際、ナビゲーション情報の利用を中止するとともに、走行支援を抑制する。支援内容実行部13では、支援内容決定部11より出力された支援内容信号に応じた走行支援を行う。
(もっと読む)
ナビゲーション装置、自車の走行車線の判定方法および判定プログラム

【課題】 自車の走行車線を正確に判定することができる「ナビゲーション装置、自車の走行車線の判定方法および判定プログラム」を提供する。
【解決手段】 ナビゲーション装置は、自車の少なくとも後方を撮像する撮像手段と、撮像手段により撮像された撮像データを解析し後方車両(A1〜A3、B1〜B3、C1〜C3)を検出する検出手段と、検出された後方車両の動きベクトル(Va1、Va2、Vb1、Vb2、Vc1、Vc2)を算出するベクトル算出手段と、道路地図データを利用して自車が走行している道路の車線数を抽出する抽出手段と、動きベクトルに基づき抽出された車線数の中から自車の走行車線を判定する車線判定手段とを有する。
(もっと読む)
運転支援システム、運転支援方法、及び運転支援プログラム
【課題】自車両の周辺状況に応じて自車両への運転支援を行う運転支援システム、運転支援方法、及び運転支援プログラムにおいて、運転支援の精度を向上する運転支援システム、運転支援方法、及び運転支援プログラムを提供する。
【解決手段】現在の自車両と前方他車両との相対関係である車間時間Tsを取得して、当該車間時間Tsに自車両の走行情報である減速度Ggを対応付けて記憶する記憶部から、取得された車間時間Tsに対応する減速度Ggを抽出し、現在の自車両Cの減速度と抽出された減速度Ggとを比較して、現在の自車両の減速度と抽出された減速度Ggとが異なる場合に走行に関する案内を行う。
(もっと読む)
ナビゲーション装置及び電気自動車のナビゲーション方法
【課題】駆動用モータの温度上昇をより確実に抑制するように経路を設定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置11の情報処理装置12は、探索した目的地までの経路に従って電気自動車1が走行する場合について駆動用モータ3の温度変化を推定し、駆動用モータ3の温度が当該モータ3の性能が劣化するレベルまで上昇しないように経路を変更する。具体的には、各リンクについて設定されるリンクコストとリンクコスト係数とに基づきリンクコストの積算値を計算し、そのリンクコストの積算値を最小にする経路を探索する。また、各リンクについて設定した温度コストと温度コスト係数とに基づいて温度コストの積算値も計算し、その温度コストが駆動用モータ3の性能が劣化する温度に対応して設定される性能劣化閾値を超えないように経路を変更する。
(もっと読む)
情報提供システム、路上装置、車載装置及び車両
【課題】交差点での右折に伴う潜在的な危険を低減するために、ドライバに適切な情報を提供することができる情報提供システムを提供する。
【解決手段】路上装置1は、交通信号機3から速度規制や車線規制などの交通規制情報を含む交通情報、各交差点が右折感応制御が許可されている交差点であるか否かを識別するための右折感応交差点情報を受信し、これらの情報を車載装置2に送信する。車載装置2は、受信した右折感応交差点情報に基づいて、右折感応制御が許可されている交差点に流入するリンクの右折コストを小さくなるように補正して、目的地までの誘導経路を探索し、この誘導経路を道路地図に重畳した画像データをモニターに表示する。
(もっと読む)
車両の制御装置
【課題】発電・電動機で駆動される車両において車両前方の信号機の信号状態あるいは障害物に応じて発電・電動機の減速回生を制御することで運転者に違和感を与えることなく、燃費を低減させるようにした車両の制御装置を提供する。
【解決手段】車両を駆動可能な電動機(発電・電動機)と車両の位置を検出する車両位置検出手段と車両が走行する走行路の少なくとも信号機の設置箇所を含む地図情報とを備えると共に、信号機の点灯色を識別し(S14)、車両が信号機に接近すると共に、信号機の点灯色が赤であるとき、電動機の減速回生量GENを増加させる(S16からS22)。また、車両の進行方向前方に存在する障害物までの距離を検出し、車両が障害物に接近するときも、電動機の減速回生量GENを増加させる。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】車間距離に関する運転者の車両操作を安全性の面から適切に評価することを可能とした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】自車両が“減速制御型の車間距離制御システムの作動条件速度以上で走行した距離”に対する“減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”から“前方車両に基づく要因によって減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”を引いた値の割合Xを算出し、算出された割合Xが所定割合(例えば、10%)未満であった場合には、車両が安全運転を行っていると診断し、安全運転が行われていることを評価するように構成する。
(もっと読む)
車両用情報提供装置
【課題】 車車間通信手段のような装置を搭載していない車両に対する出会い頭の事故を未然に回避できるようにする。
【解決手段】 自車VAが、自車VAの位置、走行速度および走行方向を含む自車情報と、検出車両VBの位置、走行速度および走行方向を含む移動物情報と、それらが得られた時刻を含む時刻情報とを基地局20に送信すると、基地局20は前記各情報に基づいて地図データ上における検出車両VBの存在確率を算出するとともに、自車位置および検出車両VBの存在確率に基づいて交差点に存在する検出車両VBの予測情報を自車VAに送信するので、前記予測情報とに基づいて自車VAの乗員への注意喚起や警報を行うことで、検出車両VBとの出会い頭の衝突を回避することができる。その際、検出車両VBは自車VAと同じ装備を備えている必要がないため、全ての検出車両VBを対象として出会い頭の衝突を回避することができ、しかも各交差点毎にインフラを整備する必要がないので低コストで実現することができる。
(もっと読む)
車両運転支援装置
【課題】交差点を設定された適切な速度で通過するように車速を制御しつつ、通過し終えた交差点の先に例えば横断歩道がある場合に、その横断歩道等についても適切な速度で通過することができる車両運転支援装置を提供する。
【解決手段】推定進路上の交差点での右左折に際して、その交差点を目標通過速度で通過できるように交差点の所定距離だけ手前から減速制御を実行する。右左折をもって通過した交差点の先に横断歩道がある場合を想定し、交差点加速抑制処理として、カメラが交差点を検知するまで、あるいは交差点を通過後に所定距離だけ走行し終わるまでは、加速させない。
(もっと読む)
ナビゲーション装置,電気自動車の駆動用モータ制御システム及び駆動用モータの制御方法
【課題】特定の駆動用モータが過剰に発熱することを回避できるように電気自動車を走行させる。
【解決手段】4つの車輪2のそれぞれに駆動用モータ3が配置される電気自動車1に、各駆動用モータ3を個別に制御するモータ制御装置35と、このモータ制御装置35とモータ制御方法決定装置5を介して通信可能なナビゲーション装置11を搭載し、ナビゲーション装置11の情報処理装置12は、設定された目的地までの案内経路を探索すると、その案内経路について、電気自動車1が走行する際に各駆動用モータ3の温度上昇レベルが上限値を超えないよう駆動用モータ3の個別の使用計画を生成する。モータ制御方法決定装置5が上記使用計画に基づいて駆動用モータ3の制御方法を決定すると、モータ制御装置35は、上記制御方法に従う制御情報に基づいて各駆動用モータ3を制御する。
(もっと読む)
ナビゲーション装置
【課題】道路の有する性質がドライバの運転技量に適しているかどうかを判定し、その判定結果に基づいて経路を探索することにより、例えば、細街路を走行することが苦手なドライバや、高速道路を走行することが苦手なドライバに対して、適切な運転支援を行うことを目的とする。
【解決手段】対向車速度認識部50は、ビデオカメラ51とレーダー52とを備え、対向車の速度を認識する。認識された対向車速度と自車速度との比や、駆動制御部80から提供される情報に基づいて検出される急ブレーキといった車両の挙動情報に基づいて、ドライバの運転技量が走行中の道路の有する性質に適するかどうかを判定する。例えば、細街路を走行することが適切ではないと判定されたドライバに対しては、地図データ上における細街路のコストを増加させることで、細街路を極力走行しない経路を探索することが可能になる。
(もっと読む)
経路案内システム及び経路案内方法
【課題】交差点の案内を適正に行うことができるようにする。
【解決手段】案内交差点における所定の陸標を伴う交差点の案内を行う案内処理手段と、運転者が前記案内処理手段による案内のとおりに車両を走行させたかどうかを判断する走行判断処理手段と、該走行判断処理手段による判断結果に基づいて、前記案内交差点における所定の陸標の優先度を設定する優先度設定処理手段とを有する。案内処理手段による案内のとおりに車両を走行させたかどうかが判断され、案内処理手段による案内のとおりに車両を走行させたかどうかの判断結果に基づいて陸標の優先度が設定されるので、探索経路を容易に認識することができるようになり、交差点の案内を適正に行うことができる。
(もっと読む)
車両運転支援装置
【課題】自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全な運転を支援することができる「車両運転支援装置」を提供すること。
【解決手段】物体検出手段17によって車載カメラ5の撮影映像から強風注意喚起用物体19を検出し、検出された強風注意喚起用物体19の外観に基づいて強風注意要否判定手段20による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段22によって強風への注意を促す警告を行うこと。
(もっと読む)
車載用報知装置
【課題】車両の運転者に対して回生ブレーキの効率的な利用を促す情報をより効果的に報知するための技術を提供する。
【解決手段】回生教示コンピュータ19は、回生制御コンピュータ20から入力されるブレーキの作動状況に関する情報に基づき、運転者によるブレーキ操作によって減少した運動エネルギ分に相当する制動エネルギのうち、回生ブレーキシステムによる回生によって回収できなかった損失エネルギに関する損失情報を導出する。そして、その導出した損失情報に基づいて、車両の走行前、走行中、走行終了後の各場面において損失エネルギに関する所定の情報を生成し、その生成した情報を運転者に報知する。
(もっと読む)
車両用運転支援装置
【課題】登坂路を走行する際の燃費を向上させることのできる運転支援装置を提供する。
【解決手段】自動車1の走行状態を制御する運転支援装置は、走行路が登坂路であることを検出する前方カメラ14および登坂路判定部24と、車速Vを検出する車速センサ12と、エンジン出力の制御に供されるアクセルペダル反力付与装置のアクチュエータ5および目標ペダル反力設定部23とを備えている。目標ペダル反力設定部23は、登坂路が検出された場合、登坂路進入車速V0を平坦路で維持するのに必要な目標エンジン出力トルクTtとなるように目標ペダル反力Ftを設定し、目標ペダル反力Ftを越える所定のアクセル踏込量範囲において、目標ペダル反力Ftの増大設定を行う。
(もっと読む)
トンネル内取締機対応の道路交通情報受信装置
【課題】トンネル内の取締機に対して高価なジャイロセンサ等のシステムを用いることなく安価な加速度センサだけで対応できて交通事故を防止に寄与する道路交通情報受信装置を提供する。
【解決手段】GPSモジュールから位置および速度データを受信し位置登録データメモリから現在位置に対応した道路交通情報を得て制御を行うCPUと、前記道路交通情報を聴覚的または視覚的に運転者に報知する報知部と、を備え、さらに位置登録データメモリの中にトンネル情報を登録し、加速度センサを備え、GPSモジュールから受信しなくなったトンネルでは、トンネル情報と加速度センサからのデータをハイパス・フィルタを介して用いて自車の位置と車速を算出し、トンネル内の取締機の警告をするようにした。
(もっと読む)
車両用警報装置
【課題】運転者に対して警報を適切に出力することができる車両用警報装置を提供すること。
【解決手段】車両用警報装置は、車両の状態に関する情報及び車両周辺の状況に関する情報を取得する取得手段12と、取得手段12により取得された情報に基づいて減速又は停止を促す警報の出力の要否を判定する判定手段14と、判定手段14の判定結果に基づいて警報を出力する警報手段18と、車両進行方向にある減速又は停止を促す標示を検出する検出手段16とを備える。警報手段18は、検出手段16により標示が検出された場合、警報を出力しない、又は所定の条件が成立するまで警報を出力しない。
(もっと読む)
移動軌跡生成装置
【課題】本発明は、乗員による操作に応じて適切な移動軌跡に変更できる移動軌跡生成装置を提供することを課題とする。
【解決手段】車両の移動軌跡を生成する移動軌跡生成装置1であって、走行環境を認識する走行環境認識手段10,11,21と、走行環境認識手段で認識した走行環境に応じて、道路領域内の位置取りに関する移動戦略を生成する移動戦略生成手段22と、移動戦略の設定情報を乗員に提示する提示手段12,23,27と、提示手段で提示された移動戦略の設定情報に基づいて乗員が移動戦略を設定するための操作を受け付ける設定手段12,28と、設定手段で設定された移動戦略に基づいて移動軌跡を生成する移動軌跡生成手段29を備えることを特徴とする。
(もっと読む)
車両位置測定装置及び車両位置測定プログラム
【課題】車両の位置を高精度に特定することができるようにする。
【解決手段】レーザーレンジファインダ3により距離が測定された地物のカメラ画像上での位置を特定し、その地物のカメラ画像上での位置から上記地物の形状及び色を検出する形状色検出部19と、形状色検出部19により検出された地物の形状及び色が基準地物の形状及び色と一致する場合、位置情報記録部11から上記基準地物の正確な位置情報を取得する位置情報取得部20とを設け、車両位置算出部21が位置情報取得部20により取得された基準地物の正確な位置情報とレーザーレンジファインダ3により測定された地物までの距離から車両1の位置を算出する。
(もっと読む)
車両用運転支援装置
【課題】車車間通信等の通信を利用して、交差点における車両どうしの衝突を回避する際に、燃料消費量の増加を抑制するようにした車両用運転支援装置の提供。
【解決手段】自車両が接近している信号機のない交差点を検出する交差点検出手段1と、自車両と他車両との間で燃費等のデータを交換する通信手段2と、他車両のうち交差点において自車両との衝突が予測される交差車両を抽出する交差車両抽出手段3と、自車両及び当該自車両に後続する一連の車両を自車両群として設定し、かつ、交差車両及び当該交差車両に後続する一連の車両を交差車両群として設定する車両群設定手段4と、自車両群及び交差車両群それぞれの燃料消費効率を求めてそれらどうし比較する燃費比較手段5と、自車両群及び交差車両群が互いに衝突することなく交差点を通過できるように、低燃費車両群の各車両に対して車速の変更を指示する走行制御指示手段6とを備える。
(もっと読む)
141 - 160 / 471
[ Back to top ]