
Fターム[2F129GG18]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | レーダー (471)
Fターム[2F129GG18]に分類される特許
61 - 80 / 471
可動物予測装置及びプログラム
【課題】適切な精度で、可動物の将来の位置及び移動状態を予測することができると共に、計算量の増大を抑制することができるようにする。
【解決手段】行動変化度算出部44は、検出された可動物の各々について、可動物の種類及び位置に基づいて、可動物の行動変化度を算出する。予測方法選択部46は、可動物の各々について、行動変化度が閾値未満である場合、可動物の種類、位置、及び移動状態に基づいて、可動物単位で、可動物の将来の位置及び移動状態を線形予測し、算出された行動変化度が閾値以上である場合、可動物を表わす複数の可動物粒子の各々について将来の位置及び移動状態を予測することにより、可動物の将来の位置及び移動状態を予測する。
(もっと読む)
ナビゲーションシステム

【課題】自車両の前方を走行する他の車両を追い越す際、自車両及び前方の他車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供する。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
(もっと読む)
情報提供装置
【課題】ユーザの視覚・触覚・聴覚といった感覚器ごとの負荷と情報提供形態の適合度を考慮して、より適切な情報提供形態と情報提供タイミングで情報提供を行う。
【解決手段】情報提供処理部104は、状況取得部103から得られる状況に基づいて、ドライバに提供する必要のある情報を提供情報キュー105へ格納する。状況予測部106は、取得される状況に基づいて、今後のドライバの感覚器ごとの負荷を予測する。提供情報のそれぞれには複数の情報提供形態が定義されており、形態ごとに感覚器負荷をパラメータとして提供タイミングの適切度を表す評価関数が定義されている。情報提供形態・タイミング決定部107は、各情報についての前記評価関数の和が最大となるように、提供形態および提供タイミングを決定し、決定された提供形態・提供タイミングで情報提供デバイス108を用いて情報提供する。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
ナビゲーション及びインスペクションシステム
【課題】地理的空間内における状況の変化を、移動中の車両から検出する。
【解決手段】地理的空間の画像を、GPS座標と共に、GPS座標と関連させて記憶する。同じ地理的空間を、移動する車両により経路のGPS座標にアクセスしながら通過する。記憶された画像のGPSデータを通過した地理的空間のGPSデータと同調させることによって記憶された画像16を再生し、記憶された画像16と通過する地理的空間画像15とを同時に閲覧可能にする。移動中の車両内で移動する観察者は、記憶された画像16と通過する空間の画像15とを比較して、状況の変化を確認する。
(もっと読む)
車載用情報端末
【課題】車両のおかれた状況に関わらず、最適なタイミングで情報をユーザに提供する車載用情報端末を提供する。
【解決手段】ナビゲーション装置は、自車両の運転者に報知すべき報知情報を取得する(ステップS10)と、その報知情報の緊急度の判断(ステップS20)と、運転者の運転負荷の判断(ステップS60)とをそれぞれ繰り返し行う。その結果、ステップS20で報知情報の緊急度が高いと判断するか、またはステップS60で運転者の運転負荷が低いと判断するまで、ステップS20〜S70の処理を繰り返し実行して報知タイミングを遅延させる。こうして報知情報の報知タイミングを決定し、決定された報知タイミングにしたがって報知情報を報知する(ステップS80)。
(もっと読む)
経路予測装置
【課題】観測データが長期間に亘って欠けている時においても信頼性ある経路予測が可能な経路予測装置を得る。
【解決手段】観測情報記憶部に記憶されている観測情報を監視し解析し、観測データが得られている間は該観測情報の解析結果を元に上記目標側経路評価関数パラメータ値調整部を周期的に実行し上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を調整し、観測データが欠けている間は上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を上記目標側最適経路生成部に入力して目標側最適経路を生成させる経路予測システムタスク実行部を含み、経路予測システムタスク実行部は、観測情報の解析結果に応じて、目標側経路評価関数パラメータ値調整部で調整するパラメータの数を変更する。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
ナビゲーション装置、車載センサの精度推定方法、および、プログラム
【課題】車載センサの信頼度を簡易な方法で推定する技術を提供する技術を提供する。
【解決手段】ナビゲーション装置100は、車載センサの精度を推定するナビゲーション装置であって、特定の区間の距離が記録されている地図データを記憶している記憶手段と、車載センサを用いて、当該区間の距離を計測する計測手段と、地図データに記録されている距離と、計測手段で計測された距離と、のずれ量に基づいて、車載センサの精度を推定するセンサ精度推定手段と、を備える。
(もっと読む)
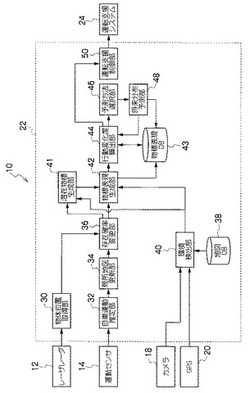
運転者支援装置、および運転者支援システム
【課題】自車両の運転者による運転操作を支援する運転者支援装置および運転者支援システムにおいて、燃費改善や渋滞緩和に貢献することができるようにする。
【解決手段】運転者支援システムにおいて路側機は、特定の信号機についての現在および将来の灯色と各灯色の継続時間とを含む信号機情報を車両に対して送信する。そして、車載装置は、目標速度設定処理にて、路側機から取得した信号機情報、および自車両から信号機が配置された交差点までの距離を表す交差点距離に基づいて、信号機の灯色が青の状態で自車両が交差点に進入可能な走行速度の範囲を表す進入速度範囲を演算する(S200)。そして、進入速度範囲を出力する(S210,S220)。この出力に応じて自車両の走行速度が進入速度範囲内になるように調節すれば、自車両を信号機の灯色が青の状態で交差点に進入させることができる。従って、燃費改善や渋滞緩和に貢献できる。
(もっと読む)
画像表示システム及び画像表示方法及びプログラム
【課題】船舶が航行する際に有益な情報を、船員等が直感的に状況を把握可能にする画像表示システムを提供する。
【解決手段】船舶の位置情報を取得する位置情報取得装置2と、海底形状を含む電子海図と潮位表とを記憶する情報記憶装置5と、画像表示装置4と、画像表示装置に画像を提供する画像提供装置1と、を含む画像表示システムであって、画像提供装置は、位置情報取得装置で取得された船舶の位置情報と、潮位表と、電子海図の示す水深に関する情報と、に基づいて、船舶の位置の海面下の深度を求め、位置情報と、海面下の深度と、電子海図の示す海底地形画像データと、に基づいて、船舶の位置の深度の海面下の海底形状の仮想空間画像を作成し、画像表示装置に提供し、画像表示装置は、画像提供装置より提供された海底形状の仮想空間画像を画像表示装置からの風景に重畳して表示する。
(もっと読む)
車両走行案内システム
【課題】 走行中の車両への的確な情報提供が行われるとともに、走行中の車両において迂回経路の算出を適切に実行することができる車両走行案内システムを提供する。
【解決手段】 基地局1では、複数の車両2から送信される車両走行情報に基づいて、所定の道路RJM上に存在する渋滞の最後尾車両位置LASTVPが推定され、その最後尾車両位置LASTVPを示す情報が走行中の車両2に送信される。システムを構成する車両2により、自車両の走行状況を示す車両走行情報が基地局1に送信されるとともに、ナビゲーション装置22による経路誘導中において、所定の道路RJMが誘導経路中に含まれるときは、基地局1から送信される最後尾車両位置LASTVPを示す情報を用いて、迂回経路の算出の要否が判定され、迂回経路の算出が必要と判定されたときは、ナビゲーション装置22に迂回経路の算出が指示される。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
物体検出装置
【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
経路探索装置および経路案内システム
【課題】より円滑に走行できる案内経路をより精度良く提示することを可能にする。
【解決手段】道路状況情報および走行状況情報をもとに、道路区間に路上占拠物が存在するか否か、路上駐車車両が存在するか否かを判断し、路上占拠物が存在すると判断した場合に、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のリンクコストよりも高く決定する一方、路上駐車車両が存在すると判断した場合には、走行状況情報に基づいて、その道路区間が円滑に走行できる道路区間であるか否かを判断し、円滑に走行できる道路区間であると判断した場合には、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のコストよりも高く決定せず、円滑に走行できる道路区間でないと判断した場合には、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のリンクコストよりも高く決定する。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
目標物検出装置及びプログラム
【課題】 自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供すること
【解決手段】 自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
安全運転支援装置、安全運転支援方法、コンピュータプログラム
【課題】自車両が交差点で対向車線を横切る際に、対向車の進路を精度よく推定し、交差点内での接触可能性の高低を報知し得る安全運転支援装置、安全運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車両Mが交差点Iで右折する際に、対向車両Oが存在すると、当該対向車両Oが走行する対向車両レーンLのレーン種別に基づく基準評価点、交差点距離Dに基づく交差点距離係数、交差点Iで接続される対向車進入道路R及び交差道路Cに基づく道路優先度係数、交差点Iを基準とした施設Fの位置及び施設ランクに基づく施設係数に基づいて、対向車両Oの進路が推定される。推定された対向車両Oの進路に基づいて、交差点I内で自車両Mと対向車両Oが接触する可能性が評価され、評価結果に応じた案内が行われる。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
自律移動体、自己位置推定方法、地図情報作成システム
【課題】自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供する。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
(もっと読む)
61 - 80 / 471
[ Back to top ]