
Fターム[2F129GG18]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | レーダー (471)
Fターム[2F129GG18]に分類される特許
41 - 60 / 471
車両停止制御装置
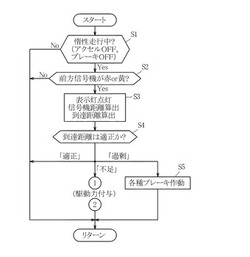
【課題】車両停止時において効率的な停止を行うことのできる車両停止制御装置を提供することにある。
【解決手段】車両1が惰性走行中であり(S1)、前方の信号機の表示が赤または黄である場合(S2)、当該信号機に対応する停止線までの距離(信号機距離)と、惰性走行により到達する到達距離とを比較し(S3、S4)、到達距離が信号機距離を超えるときには各種ブレーキを作動し(S5)、到達距離が信号機距離に達しない場合は駆動力を発生させるよう制御する。
(もっと読む)
運転支援システム及び運転支援管理センター

【課題】走行環境に即した実現性の高い運転支援を容易に実現することのできる運転支援システム及び運転支援管理センターを提供する。
【解決手段】管理センター200の運転履歴データベース220には、車両操作に関する情報を含んだ車両情報が該当する経路情報に関連付けされて運転履歴として登録される。また、車載システム100及び管理センター200は、運転支援の対象とする車両の走行経路を特定するとともに、この特定した走行経路に対応する運転履歴を運転履歴データベース220から抽出する運転教示部を備える。そして、運転教示部は、運転履歴データベース220から抽出した運転履歴に基づき、ドライバに対する運転教示を行う。
(もっと読む)
勾配変化量データ作成装置及びナビゲーション装置
【課題】座標に関連付けられた勾配値から勾配変化量に関するデータを自動的に作成する装置及び当該データを用いたナビゲーション装置を提供する。
【解決手段】地図データ保存部から勾配変化量データを作成するための対象リンクを選択し、対象リンクの一部又は全部の勾配値を座標と関連付けて保存された勾配値保存部を参照し、当該勾配値に基づいて当該勾配変化量を演算し、当該勾配変化量の絶対値が所定閾値以上である座標にフラグを設定する。
(もっと読む)
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
車両の走路判定システム
【課題】本発明は、車両の周囲に存在する物体に基づいて車両の走路を判定するシステムにおいて、実際の道路状態に適した走路判定を行える技術の提供を課題とする。
【解決手段】本発明は、上記した課題を解決するために、複数の物体が検出された場合に、それら物体間に車両が進入可能な道路が存在するか否かを判別し、複数の物体間に道路が存在しないと判定された場合は前記複数の物体を1つの物体として認識し、複数の物体間に道路が存在すると判定された場合はその道路を含めて走路を判定するようにした。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】狭路や狭い屈曲路を走行中に最も接触の危険性が高い車体部分を含んだ範囲の映像に自動的に切り替えて表示する車両用表示装置を提供する。
【解決手段】表示コントローラ11は、ナビゲーション装置13により取得した車両の現在位置周辺の道路地図情報、車両周囲センサ14により測定された車両周辺の障害物までの距離を用いて、狭路または屈曲路へ接近または進入したことを判別し、さらに、車両情報収集手段12により収集された車両情報を用いて、判別された狭路またはクランクにおける走行状況を識別し、車載カメラ15で撮影した車両周辺の映像の表示内容を指示する表示制御指令を出力することにより、カメラ映像切替装置16は、該表示制御指令の表示内容が指示する通り、仮想カメラの視点位置と視点方向と表示範囲とを変更した映像に切り替えて表示装置17へ表示する。
(もっと読む)
車載用電子機器
【課題】ルームミラーの大きさを小さくすることなく、文字、数字、画像、動画等の情報を表示することができ、且つ操作性にも優れた車載用電子機器を提供する。
【解決手段】薄型で細長な前面開放したリアケース11内の右側に、制御部を構成する表示制御基板12を配置し、中央に、制御部及び電子機器本体制御部を構成する本体制御基板15を配置する。また、表示制御基板12に積層して情報提示部を構成する表示パネル13を配置する。また、表示制御基板12,本体制御基板15及び表示パネル13を覆うようにルームミラーの鏡面部を構成する鏡14を配置し、さらに、ルームミラーの鏡面の全部を覆う位置と、ルームミラーの鏡面から退避した位置とに移動可能な接触検出パネル16を配置した。
(もっと読む)
走行環境認識装置
【課題】車両の走行環境を高精度で認識する。
【解決手段】任意の地点を原点とする絶対座標系における自車両の位置及び向きを特定し(S20)、その絶対座標系をグリッドに分割して自車両の走行の障害となるものの占有確率をグリッドごとに記憶した占有グリッドマップを作成して、占有確率をベイズ推定により更新する(S30〜S50)。具体的には、自車両前方に存在する物体を検出するレーザレーダ20、自車両周辺に存在する他車両から送信されたその他車両の位置に関する情報を受信する通信機50、及び、車線境界線の位置を特定可能な地図データを記憶する地図データベース40からの各情報に基づき、占有グリッドマップのグリッドごとに占有確率を別々に求め(S30,S40)、それらを占有グリッドマップのグリッドごとに融合することで、自車両の走行の障害となるものの占有確率を求める(S50)。
(もっと読む)
運転支援システム、車載装置、情報配信装置
【課題】個々のドライバに有用な注意情報を、ドライバを煩わせることなく配信可能な運転支援システムを提供する。
【解決手段】車載装置2は、ドライバの危険反応を検出した場合に(S210:YES)、ドライバの行動モデルの学習が十分に使用可能なレベルにあり(S220:YES)、且つ、危険反応を引き起こした要因がドライバではなく、走行環境にあると推定される場合(S230:YES)に、その危険度を算出した上で(S240)、管理センタに対して報告情報を送信する(S250)。従って、危険要因がドライバ側にある普遍性のない危険ポイントが、危険度マップに登録されてしまうことを防止でき、危険度マップの有効性を向上させることができる。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用ディスプレイ装置
【課題】検索画面を前景として見える道路形状に合わせて描写することで視認性と操作性を向上した車両用ディスプレイ装置を提供する。
【解決手段】ナビゲーション用の情報を格納したデータベースと、データベースから抽出した情報をもとに検索画面を含む画像情報を生成し、検索画面を遠近法で描画する画像情報生成部と、画像情報生成部で生成した画像情報を車両のフロントガラスに投影表示するヘッドアップディスプレイと、車両の位置情報に応じて画像情報生成部を制御し、車両の前方視野における前方車両との車間位置に検索画面を路面形状に合わせて表示するように制御する制御部と、を具備する
(もっと読む)
運転支援装置、情報配信装置、運転支援方法及びコンピュータプログラム
【課題】取得した逆走車両情報に基づく適切な運転の支援を行うことが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】複数の取得元から逆走車両を特定する逆走車両情報を取得し(S1〜S4)、取得した逆走車両情報の取得元の種類を特定し(S6)、特定された取得元の種類に基づいて取得した逆走車両情報の信頼度を判定し(S7)、判定された信頼度に基いて、自車両に対する逆走車両を回避する為の運転の支援を行う(S8〜S10)ように構成する。
(もっと読む)
車、車両の自動運転システム
【課題】記憶媒体がどの位になるか車体に乗せて正常に作動するようにする。
【解決手段】記憶媒体をパンコンなどもスプリングなどを付けて揺れなどに対応する
それにより揺れによる間違った判断をなくしドライブレコーダードライブスキャナー ナビゲーションシステムなどを使い自動運転をし、監視する責務は自己で追うものとする。詳しい内容は請求項へ。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
車両状態記録装置
【課題】明らかな異常でないが、ユーザが違和感が感じた場合に、運転者の操作がなくても、車両状態情報を記憶可能な車両状態記録装置を提供すること。
【解決手段】車両の位置情報を取得する位置情報取得手段11と、車両挙動を示す車両挙動情報を取得する車両挙動情報取得手段15と、位置情報と該位置における標準的な車両挙動情報を関連づけて記憶する標準車両挙動情報記憶手段16と、現在の位置情報に対応づけて標準車両挙動情報記憶手段16に記憶された標準的な車両挙動情報に対し、現在の車両挙動情報が異なっているか否かを判定する判定手段23と、標準的な車両挙動情報と現在の車両挙動情報が異なっていると判定された場合、車両の状態情報を記録する記録手段24と、を有する車両状態記録装置100を提供する。
(もっと読む)
俯瞰画像生成装置、地図データ生成システム、俯瞰画像生成装置の俯瞰画像生成方法および俯瞰画像生成プログラム
【課題】道路を見下ろした精度が高い俯瞰画像を提供できるようにすることを目的とする。
【解決手段】車両はレーザスキャナとカメラとを備えて道路を走行する。レーザスキャナは道路の各地点に向けてレーザを照射して道路の各地点までの距離と方位とを計測する。カメラはカメラ映像を撮影する。俯瞰画像生成装置は、画像生成装置記憶部190と地面高特定部130と俯瞰画像表示部とを備える。画像生成装置記憶部は、レーザスキャナの計測データに基づいて生成され道路の各地点の三次元座標を示す三次元点を含んだデータを三次元点群として記憶し、カメラによって撮影されたカメラ映像を記憶する。地面高特定部130は三次元点群から道路の縁石を表す複数の三次元点を抽出し、抽出した複数の三次元点に基づいて道路面の高度を地面高として特定する。俯瞰画像表示部は地面高とカメラ映像とに基づく画像であって道路を見下ろした俯瞰画像を表示する。
(もっと読む)
交通監視ポイント検出装置及びプログラム
【課題】 周囲に存在する交通監視ポイントを検出し、それに関する適切・有益な情報を報知することで、安全運転に寄与することのできる交通監視ポイント検出装置を提供すること
【解決手段】 自車の位置を検出するGPS受信機と、交通監視ポイントの位置情報を記憶するデータベースと、GPS受信機で検出された現在位置情報と、データベースに格納された交通監視ポイントの位置情報とに基づき、警報対象の交通監視ポイントを抽出し、抽出された交通監視ポイントについての警報を表示部のメイン表示領域R1に描画出力する制御部と、を備える。制御部が行う交通監視ポイントについての警報は、その交通監視ポイントについての実写画像がある場合には、それを描画し、実写画像が無い場合には警報の種類に関連づけられた画像を描画するようにした。
(もっと読む)
情報提供装置及び情報提供方法
【課題】乗員により情報提供手段の動作を認識することができる情報提供装置を提供することである。
【解決手段】車両に設置され、乗員に対し情報を提供する情報提供手段と、乗員が注意を向ける注意対象を推定する注意対象推定手段と、乗員の視認可能なエリアを特定する視認エリア特定手段と、エリア内に情報提供手段を含むか否かを判定する判定手段と、判定手段による判定結果に応じて情報提供手段の動作を制御する動作制御手段とを備える。
(もっと読む)
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
41 - 60 / 471
[ Back to top ]