
Fターム[2G087BB01]の内容
Fターム[2G087BB01]に分類される特許
121 - 140 / 153
エンジン発生トルクの測定装置
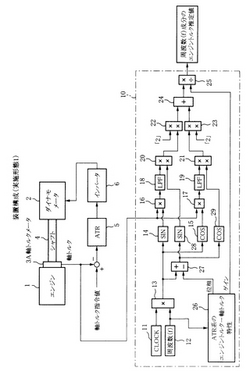
【課題】エンジン発生トルクに含まれる任意の周波数成分の波形及びエンジン発生トルクの波形を高い精度で測定する。
【解決手段】エンジン1の軸トルク検出でダイナモメータ2をトルク制御するエンジン試験装置において、エンジン発生トルク推定部10は、軸トルク検出信号を乗算器16,17で周波数(f)でsin変換およびcos変換し、これら信号を低域通過フィルタ18.19(または積分器)にそれぞれ通すことにより、エンジン発生トルクに含まれる周波数(f)のsin成分およびcos成分のみを抜き出し、これらを乗算器20,21でそれぞれ逆sin変換および逆cos変換して加算器24で合成することによりエンジン発生トルクがもつ周波数(f)成分の波形を得る。関数発生器26は位相遅れとゲイン低下を補正する。推定部10を周波数f〜f×N分設けることを含む。
(もっと読む)
自動清浄式光センサ
本発明は、燃焼室(7)における燃焼過程での放射光を検出する光センサ(1)であって、前記燃焼室に面し、前記センサの先端に配置されている少なくとも1個のレンズ(2)を含む光センサに関するものである。このセンサ(1)の前面は測定の間燃焼室(7)からの煤によって汚される。本発明によるセンサ(1)には前面レンズの領域において該センサの先端に配置されている加熱装置(4)が設けられている。本発明は、このセンサの先端が、前面レンズ(2)における煤が燃え尽きる特定の温度まで前記加熱装置(4)によって加熱できることを特徴とする。その結果、センサ(1)は清浄な状態に維持され、所望通り測定時間全体の間作動可能とされる。 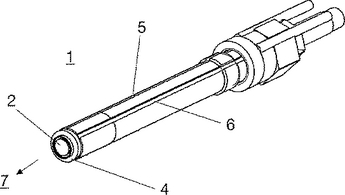 (もっと読む)
(もっと読む)
ダイナモメータのスロットルアクチェータ

【課題】制御性能への影響を無くし、高い精度でスロットル開度制御を行う。
【解決手段】アクチェータ本体(4A,4C,4D)とコントローラ(5A〜5C)とを一体構成にしたことで、その間を接続する電力ケーブルや信号線および直流電源線を最短長さに短縮して、これら接続線による制御性能への影響を無くし、また制御性能を考慮した回路設計を不要にする。
モータ4Aとプーリー4Dの間からクラッチを省いて常時結合状態にすることで、モータ回転位置とプーリーの回動角度との間にギヤ4Cのバックラッシュ分が誤差として入り込むことが無くなり、停電発生時および次回の試験時に高い精度でスロットル開度制御を再開可能にする。
(もっと読む)
エンジンの慣性モーメント測定装置
【課題】エンジン回転数変化の履歴に依存する損失の影響を受けることなく、さらにエンジン回転数を大きく変化させることなく、エンジンの慣性モーメントを精度よく測定する。
【解決手段】エンジン制御部11によりエンジン1の回転数をほぼ一定にし、正規分布乱数信号をダイナモメータ制御部12のトルク指令としてダイナモメータの出力トルクを加振制御する。検出部13は加振制御における結合シャフト4に発生する軸トルクTtmおよびダイナモメータの回転数ωdyのデータを一定時間だけ収録する。演算部14は、上記データから、軸トルクTtmを入力、ダイナモメータ回転数またはエンジン回転数を出力とする伝達関数を推定し、この伝達関数から角周波数ωに対するゲインgのゲイン特性(ω,g)を求め、このゲイン特性から演算によってエンジン慣性モーメントを求める。加振制御を正弦波とすることも含む。
(もっと読む)
エンジン試験装置
【課題】従来のエンジントルクマップを不要にしてエンジン試験精度を高める。
【解決手段】エンジントルクオブザーバ11は、軸トルクメータ3で検出する軸トルクとダイナモメータ速度およびエンジン慣性モーメントからエンジン出力トルクを推定する。エンジン慣性モデル部12は、オブザーバで推定するエンジン出力トルクと車両モデル部6のエンジン負荷トルク指令の差分トルクと、エンジン慣性とからエンジンモデル速度を求める。
エンジンモデル速度とダイナモメータ速度(エンジン速度)からエンジントルク推定値補正分を求め、この補正分でオブザーバの出力を加算補正することも含む。
(もっと読む)
内燃機関のピストン測温装置
【課題】使用条件下で要求される耐久強度を十分に有することが可能な内燃機関のピストン測温装置を提供する。
【解決手段】電磁誘導を用いてピストンを含む運動部品の温度を計測する内燃機関のピストン測温装置であって、エンジンブロック側には、送信コイルと、受信コイルと、前記送信コイル及び前記受信コイルが巻回されるとともに磁界を形成するための磁性材料からなる支持体が設けられ、前記支持体のうち前記送信コイル及び前記受信コイルが巻回されている部分は、前記支持体の破壊強度よりも高い強度を有する材料の保護部材により覆われていることを特徴としている。
(もっと読む)
排気ガス測定装置および排気ガス測定方法
【課題】内燃機関のトルクを直接計測することなく、内燃機関の仕事量を求め、内燃機関の単位出力あたりの排気ガス中の各成分の質量を、容易に求めることができる排気ガス測定装置および排気ガス測定方法を提供すること。
【解決手段】内燃機関から排出される排気ガス中のCO、CO2およびTHC等の炭素化合物に係る成分の排出量に基づき、当該内燃機関の仕事量を算出することで、ECUが有しているトルクデータ等を用いることなく内燃機関の仕事量を簡単に算出し、内燃機関の単位仕事量あたりに排出される排気ガス中の各成分の質量を算出することを可能とした。
(もっと読む)
エンジン特性の推定方法
【課題】 エンジン制御パラメータに応じて変化するエンジン特性の推定方法において、推定されたエンジン特性の信頼性を高める。
【解決手段】 エンジン制御パラメータの第一特定値(I2)に対するエンジン特性の第一定常値(T(t3))を測定する段階と、エンジン制御パラメータを第一特定値から第二特定値(I3)まで連続的に変化させ、エンジン制御パラメータの連続変化に対するエンジン特性の過渡値変化を測定する段階と、エンジン制御パラメータを第二特定値から変化させない安定化期間(A3)の経過時に第二特定値に対するエンジン特性の第二定常値(T(t5))を測定する段階と、第二定常値と安定化期間の開始時におけるエンジン特性の過渡値(T(t4)’)との差に基づき、エンジン特性の過渡値変化を定常値変化に補正する段階、とを有する。
(もっと読む)
エンジン制御パラメータの適合方法及び適合装置
【課題】 エンジン制御パラメータの適合方法において、全体の計測点数を増加させなくても、境界上に配置する計測点の個数を適度に増加させて適合精度を向上させる。
【解決手段】 実験計画法(DOE)のスペースフィリング (Space Filling)を使用して、隣接する2つの計測点間の最小距離を最大化するように所定数の計測点を均等に配置する。この後、計測対象となる複数の制御パラメータのうちの少なくとも1つの制御パラメータに関して計測点の位置を当該制御パラメータの中心値から境界方向へ所定の拡張倍率で拡張して、最終的に境界に配置しようとする個数分の計測点を境界を越えさせた状態にする。この後、この拡張により境界を越えた計測点を境界上に再配置する。
(もっと読む)
動力伝達系の試験装置とその制御方法
【課題】 トルクオブザーバのゲインを上げても、電気慣性制御の応答を大きく低下させることなく、トルク推定のリップルを抑える。
【解決手段】 制御手段5は、トルクオブザーバ6において、一慣性系をモデルとしてダイナモメータ3の速度を推定し、その推定速度ωm^とダイナモメータ3の実速度ωmとの偏差をトルク推定部8で比例ゲインGを積算することにより、動力源の発生トルクτe^を推定する際に、トルク推定の前段で、ローパスフィルタ40により偏差の高周波分を除去することで、トルク推定のリップルを抑え、この動力源の発生トルクτe^に基づいてダイナモメータ3のトルク指令τ*を算出してダイナモメータ3の発生トルクを制御する。
(もっと読む)
内燃機関動作較正システム
【課題】内燃機関の動作に関するモデルを較正するシステムおよび方法を提供する。
【解決手段】回転自在のクランクシャフトを備える第1エンジンの運転パラメータを評価するシステムが提供される。このシステムは、第1エンジンのクランクシャフトの複数の角位置における瞬間クランクシャフト速度の関数として第1エンジンの運転パラメータを評価するモデルを含んでいる。このモデルは、回転自在のクランクシャフトを備える第2エンジンからの運転パラメータに少なくとも部分的に基づいて開発される。第1エンジンのクランクシャフトの複数の角位置における第1エンジンの瞬間クランクシャフト速度を表わす値を決定するようにセンサが動作可能である。またそれらの値の少なくとも一部を修正して、瞬間クランクシャフト速度のばらつきをもたらす第1エンジンと第2エンジンとの差異を少なくとも部分的に較正するため、修正機能が動作可能である。修正された値はモデルに入力される。
(もっと読む)
内燃機関を駆動する方法,コンピュータプログラムおよび制御装置
本発明は,状態自動機械(12)に従って所定タイプの内燃機関(20)を駆動する方法に関する。この種の方法において,まず内燃機関の可能な駆動状態が調節されて,それが状態自動機械の層nに対応づけられることが,知られている。その後他の層(n+1)において,既知の方法によって,その前に求められた駆動状態に対するサブ駆動状態が詳細に説明される。この種の方法を,種々の内燃機関を駆動するために簡単かつスリムに適合させることができるようにするために,本発明によれば,方法および状態自動機械を,状態自動機械が少なくとも2つのグループの層を有しており,その場合に第1のグループの層は,所定のタイプの内燃機関が他のタイプの内燃機関と共通に有する駆動状態を表し,第2のグループの層はそれぞれ,所定のタイプの内燃機関にとって固有の駆動状態を表すように,形成することが提案される。  (もっと読む)
(もっと読む)
推力測定装置及び、推力測定方法
【課題】宇宙用小型推進器の推力を、ガス供給配管と電力供給配線による抵抗や振り子の支点部分の摩擦による影響を受けず、精度良く測定できるための推力測定装置を得る。また、錘の重さや個数による制限を受けず、広い推力範囲で分解能の良い推力較正が可能な装置を得る。
【解決手段】推力測定装置は、支点をもち、一端に推進器2を備えるアーム4と、前記アームの他端に設けられ、前記アームの一端に印加される荷重を測定する第1のロードセル3と、前記アームの一端に荷重を印可し、前記推進器の推力を模擬するリニアモータ9と、前記リニアモータが印加している荷重を測定する第2のロードセル8と、を備える。
(もっと読む)
エンジンの制御装置
【課題】エンジンの機差、経時変化、環境変化等に対応することができ、エンジントルクを高精度にかつ高応答性をもって制御することのできるエンジンの制御装置を提供する。
【解決手段】エンジントルクを直接的もしくは間接的に検出する手段33と、エンジン制御パラメータを演算する手段220、250、270、280と、前記エンジントルク検出手段33で検出される検出トルクに基づいて、前記エンジン制御パラメータ220、250、270、280を補正する手段310と、を備えて構成される。
(もっと読む)
エンジンの試験装置及び吸気装置
【課題】 エンジンの吸気ポート内における渦流や剥離の発生を防止することで、吸気ポートが本来持つ吸気ポート性能を発揮させる。
【解決手段】 吸気マニホールドが取付けられていない状態でエンジンを試験する際に、そのエンジンのシリンダヘッドに取付けられる試験装置において、シリンダヘッド9内の吸気ポート10の吸入口に着脱自在に取付けられる吸気通路21と、吸気通路21の途中に所定間隔Iを切離して形成され、周方向から吸入空気を導入するための開口部22とを備える。
(もっと読む)
エンジン回転周期測定器
【課題】簡単な作業で、エンジンの回転周期の測定を行うことである。
【解決手段】エンジンの点火を行うイグナイタに接続される電源の接地側に取り付けられるプローブ40によって検出された信号は、増幅回路52、フィルタ回路54、検波回路56を経てF−V変換回路58に入力される。F−V変換回路58は、検波回路56の出力信号の周波数帯域に応じた電圧を出力し、タイマー回路60のノイズマスク信号のパルス幅を決める。タイマー回路60から出力されるノイズマスク信号を用いて、入力制御回路62は、検波回路56の出力信号からノイズ信号をマスクする。ノイズ信号が抑制された信号に基づき、エンジン回転周期66の信号が出力される。
(もっと読む)
エンジン回転周期測定器
【課題】簡単な作業で、エンジンの回転周期の測定を行うことである。
【解決手段】エンジンの点火を行うイグナイタに接続される電源の負荷側に小型の磁気センサであるMIセンサ40が取り付けられる。MIセンサ40によって検出された信号は、増幅回路52、フィルタ回路54、検波回路56を経て処理される。検波回路56の出力はオートゲインコントロール(AGC)回路58により増幅回路52にフィードバックされ、例えば、周波数帯域により検波回路56の出力の振幅が変動することが抑制される。ノイズが除去され、振幅が一定化された信号に基づき、エンジン回転周期66の信号が出力される。
(もっと読む)
エンジン評価方法及びエンジン評価装置
【課題】 簡単な構成でエンジンを効率よくかつ確実に評価できるエンジン評価方法及びエンジン評価装置を提供する。
【解決手段】 回転中のエンジン1の振動を検出した検出信号波形と予め設定した基準正常状態における正規基準波形との振幅差に基づく対正規基準波形評価値を算出し(S3)、対正規基準波形評価値が予め設定した第1許容値範囲内にあるか否かを判定する(S4)。第1許容値範囲内にないときは検出信号波形と予め設定したエンジン1の基準正常状態における例外的基準波形との振幅差に基づく対例外的基準波形評価値を算出し(S6)、その算出した対例外的基準波形評価値が予め設定した第2許容値範囲内にあるか否かを判定する(S7)。対例外的基準波形評価値が第2許容値範囲内にある場合には、異常な検出信号波形が検出される場合であってもエンジン1を正常と判定する(S5)。
(もっと読む)
車両の走行模擬試験システム
【課題】車両に搭載されるエアコンやカーオーディオなどの付属装置を実装することなく、それらの付属装置を作動することで生じる車両走行中の電気負荷変動による車両走行制御への影響を仮想的に検証試験できる走行状態システムを提供する。
【解決手段】実際の車両に搭載されるブレーキシステムを搭載せずに、ドライブシャフト40に直結した負荷吸収モータ50a,50bがエンジン10やモータ20の駆動出力を吸収することで車両走行状態を模擬する試験システムにおいて、運転条件に示された所定のタイミングでバッテリに対する電気負荷の値を変動させるための負荷変動指令を走行状態模擬装置60が電気負荷装置25に出力し、電気負荷装置25がその負荷変動指令を受けてメインバッテリ24に所定の電気負荷変動を与える。
(もっと読む)
自動適合装置
【課題】確実に自動適合を行う。
【解決手段】適合を行う各運転状態毎に機関運転制御用パラメータを操作して出力値が適合目標値となるようにする。複数の出力値が適合目標値を超過したときに操作すべき共通のパラメータに対し、それら出力値がトレードオフ関係となるか否かを判断し、その判断に基づいて操作すべきパラメータおよびそのパラメータの操作順序と操作方向とが決定される。
(もっと読む)
121 - 140 / 153
[ Back to top ]