
Fターム[3C007BS15]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 水平多関節型 (420)
Fターム[3C007BS15]に分類される特許
201 - 220 / 420
ウェーハ搬送装置
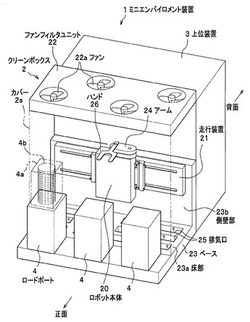
【課題】ミニエンバイロメント装置のクリーンボックス内に、クリーンエアの好適なダウンフローを形成できる、ウェーハ搬送装置を提供することを課題とする。
【解決手段】半導体ウェーハ4bを加工するミニエンバイロメント装置1に備わるクリーンボックス2の背面の側の側壁部23bにロボット本体20の走行装置21を備え、ロボット本体20を走行させることで、クリーンボックス2の床部23aに、ロボット本体20が走行する軌道を設置することなく、ロボット本体20を走行できる構成とする。
(もっと読む)
多関節ロボットアームの関節部構造、及びミニエンバイロメント装置

【課題】ケーブルの耐久性を向上し、発塵の量も軽減できる、多関節ロボットアームの関節部構造と、ミニエンバイロメント装置を提供することを課題とする。
【解決手段】多関節のロボットアーム20bの関節部構造を構成する第1関節軸21a、第2関節軸21b、及び第3関節軸21cを中空軸とする。中空部21a1、21b1、及び21c1には、樹脂からなる円筒状の部材である保護部材213を圧入して、中空部21a1、21b1、及び21c1の内周面を保護部材213で被覆し、ケーブル23の通路となる配線挿通孔を形成する。このような多関節のロボットアーム20bの関節部構造を具備する搬送ロボット20を、ミニエンバイロメント装置に備える。
(もっと読む)
搬送ロボット
【課題】本発明は、簡単な構造の上下軸機構を備えた搬送ロボットを提供する。
【解決手段】ワークを一方向に搬送するアーム部5と、前記アーム部5を昇降させるリンク機構2からなる昇降機構を備えた搬送ロボットにおいて、前記リンク機構2が、少なくとも2つの前記リンク機構2、3を備え、互いに直交する回転軸R1軸、R2軸に沿ってリンク6、7が回転動作をすることで前記アーム部5を昇降させるとするものである。
(もっと読む)
ウエハ搬送装置及びその調整方法
【課題】ウエハを所定方向に向いた回転軸を中心に旋回させかつ回転軸を中心とする径方向に往復動させることが可能なロボット部と、回転軸と直交するX方向へロボット部を移動させるロボット部移動手段と、を有するウエハ搬送装置において、ウエハが目標位置に搬送された時点でロボット部がウエハを移動させる径方向がX方向に正しく直交しているように、ウエハ搬送装置に対するティーチング作業における位置精度を高める。
【解決手段】保持部10が保持する治具50を径方向(T)へ移動させた前後において、治具50の撮像手段51で目標位置に設けられたマーク28を撮像し、撮像画像上のマークの変位に基づいて、径方向(T)への移動に伴う治具50のX方向移動量を検出し、検出されるX方向移動量が所定値以下となるようにロボット部11のX方向位置を修正する。
(もっと読む)
防塵機構を備えた基板搬送装置およびシステム、これらを用いた半導体製造装置
【課題】防塵効果が高く、アーム部が複数になっても対応できる防塵機構を提供する。
【解決手段】基板を搭載するアーム部を支持するとともに、支柱9外面に設けられた直線状の開口部を介して支柱9内に設けられた案内機構22へと接続されて、案内機構22に従って、開口部の開口を移動する支持部材4と、開口部を封じて、支柱9内部と外部とを隔離するシールベルト5bと、を備える。案内機構22によって支持部材4が移動しても、シールベルト5bによって支柱9の内部が外部に露出しないよう構成され、シールベルト5bが、その両端を支柱9内部に固定されるとともに、支持部材4に回転可能に支持されたローラ35〜42に巻装されて、開口部を封じるように張架されたものである。
(もっと読む)
基板把持装置およびそれを備えた基板搬送ロボット、半導体製造装置
【課題】ハンド全体の厚みを薄くし、小型・軽量化した基板把持装置を提供する。
【解決手段】基端側から先端側へ二股に分かれるベースプレート11と、ベースプレート11の上面に設けられる把持プレート12と、ベースプレート11と把持プレート12の間に設けられる把持駆動部7と、前記二股の基端の先端と把持プレート12の先端とから成る把持部10と、前記二股の各先端で基板の一部を案内するガイド部20と、を備え、把持駆動部7が、把持プレート12の基端側にて基端側を常に上側へ付勢する付勢手段15と、付勢手段15の近傍で通電により把持プレート12をベースプレート11側に吸着させる電磁石部14と、先端側にあって把持プレート12がベースプレート11に対して上下に揺動させる軸受部13と、で構成し、ガイド部20が基板の一部の周囲の表面と裏面と側面とに当接することのできる案内溝23を先端に備えた。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】アームが、駆動部1からの回転動作を伝達する伝達機構と、伝達機構を収容するアームケース201と、伝達機構を覆うようにアームケース201の上面に装着されるアームカバー214と、によって構成された水平多関節ロボットにおいて、アームカバー214が、アームケース201が延在する方向に複数分割された複数のアームカバーからなるよう構成し、さらに複数のアームカバー214が互いに折り重なる部分を形成した。
(もっと読む)
自動教示システム
【課題】簡易な構成により搬送ロボットに対して搬送対象ポイントまでのハンドの移動経路を自動的に教示することが可能な自動教示システムを提供する。
【解決手段】 自動教示システムは、第1の光学センサ72、第2の光学センサ74、記録手段および算出手段を実現するCPU50を備える。第1の光学センサ72および第2の光学センサ74は、搬送対象ポイントに対する相対位置が予め定められるように配置される。第1の光学センサ72は、ハンド20の水平方向の一端部を検出可能に構成される。第2の光学センサ74は、ハンド20の水平方向の他端部を検出可能に構成される。CPU50は、第1の光学センサ72および第2の光学センサ74によってハンド20の端部が検出された時におけるロボット座標系における座標値を記録するとともに、その座標値に基づいてロボット座標系における搬送対象ポイントの座標値を算出する。
(もっと読む)
ロボット動作評価装置およびロボット動作評価方法
【課題】ロボット動作評価装置を比較的安価に構成可能とすること。
【解決手段】第2アーム6の先端に液滴吐出装置10を取り付け、第2アーム6の移動領域の下方に経路記録用紙13を配するようにした。そして、水平多関節ロボット1による特定動作中に、液滴吐出装置10から経路記録用紙13上の対向箇所に液滴を吐出し、吐出した液滴の着弾状態に基づいて第2アーム6の先端の動作状態を評価するようにした。そのため、第2アーム6の先端の水平面内の移動経路を経路記録用紙13に記録し、記録した液滴の着弾状態を参照することで、第2アーム6の先端の動作状態を評価できる。それゆえ、動作状態の評価に高価なレーザ変位計を用いずに済み、ロボット動作評価装置を比較的安価に構成できる。
(もっと読む)
エンドエフェクタ及びそれを備えた搬送装置
【課題】1個のエンドエフェクタにおいて、ウェハを2枚搬送することができるようにする。
【解決手段】ウェハを把持する把持機構を備えたエンドエフェクタ3において、エンドエフェクタ3の上面に把持機構を備え、上面の裏面にも把持機構を備え、エンドエフェクタの上面及び裏面の両方でウェハを把持可能に構成する。
(もっと読む)
ロボットのハンドの制御方法及びワーク搬送ロボットシステム
【課題】センサの応答差による誤差が加算されてしまうのを防ぐとともに、半導体ウェハがセンサ上を通過し終わらなくても、ずれ量を算出することが可能なロボットのハンドの制御方法及びワーク搬送ロボットシステムを提供する。
【解決手段】第1の位置から前記第2の位置にワーク10を搬送する搬送路中に、ワーク10の異なるエッジを検出する2個のセンサ301,302が、ワーク10の基準位置を定義するアライメント座標系に基づいて配置されており、第1の位置から前記第2の位置までワーク10を搬送する際、ワーク10の異なるエッジを2個のセンサ301,302を用いて検出し、2個のセンサ301,302から出力された検出信号から、ワーク10の基準位置からのずれ量を算出し、そのずれ量を、ロボット100の動作軌道を定義するロボット座標系に変換し、ロボット100のハンドの動作を制御する。
(もっと読む)
ロボット
【課題】伸縮型移動体を構成する2つの移動部材が互いに連動して移動し、且つ一方の移動部材を他方の移動部材よりも長距離移動させるための機構を、大型化を避けながら、しかも、発塵を極力抑制できる形態にて実現する。
【解決手段】伸縮型移動体5を構成する第1の移動部材9および第2の移動部材10に夫々第1のラック19および第2のラック20を設け、昇降用モータ18の回転軸18aに設けられた小径側の第1のピニオン21を第1の移動部材9の第1のラック19に噛合させ、大径側の第2のピニオン22を第2の移動部材10の第2のラック20に噛合させたので、第1の移動部材9および第2の移動部材10を連動して、且つ第2の移動部材10が第1の移動部材9の2倍の距離移動するように構成する。
(もっと読む)
回転角度検出装置及びロボットのアーム回動機構及びロボット
【課題】ロボットに備えられたアームの絶対角度をより容易かつ高精度に検出することの
できる回転角度検出装置、及び該回転角度検出装置を備えるロボットのアーム回動機構、
及び該アーム回動機構を採用したロボットを提供する。
【解決手段】基台11の上面11Aには基台11内のモータにより回動される回転軸AX
1に固定される回転体としての連結軸12が設けられている。基台11の上面11Aには
反射型光センサ21を配設し、連結軸12の下面12Aには中心が軸心C1に一致する有
底円筒形状の反射体20を固定する。反射体20の円筒側壁20Bの下面には、その底部
20Aに対して傾斜を有する反射面20sが形成されている。反射型光センサ21から発
せられる光L1の反射面20sによる反射光L2の光量が、反射面20sと反射型光セン
サ21との対向距離Dにより変化することを利用して、基台11に対する連結軸12の回
転角度を絶対角度として得る。
(もっと読む)
スピナーシステムの搬送ロボット、その搬送ハンド及びその真空印加装置
【課題】搬送ハンドからウエハーへの直接的・間接的な伝熱量を最小化してウエハーの高温化を防止するスピナーシステムの搬送ロボットハンドを提供する。
【解決手段】搬送対象のウエハーを真空で吸着固定する搬送ロボットであって、搬送ハンドに備えられる‘U’字形の吸着部上の分岐する両側端部と分岐開始部の中央部にそれぞれ一つずつ三角形の配置をなすように接触リング部が形成され、前記接触リング部の中心に、真空吸入圧が印加される真空ホールが形成される。よって、接触リング部によるウエハーの接触面積を減らし、その突出高を増大させることによって搬送ハンドから搬送されるウエハーへの直接的・間接的な伝熱量を減少させ、また搬送ハンドがウエハーを下ろしてから帰還するかホームポジションで待機する時点で冷却されて、以後に搬送されるウエハーへの伝熱量を減少させることができる。
(もっと読む)
ロボット制御装置
【課題】収納体から被搬送物を搬出入して交換する時間を短縮させると共にロボットの動作の調整作業を容易にすることができるロボット制御装置を提供する。
【解決手段】制御部14は、前進動作手段により、直線補間のもと、第1ハンド部材28を所定のカセット24に向かって前進するように直進動作させる。同時に、回避動作手段により、前進動作手段による第1ハンド部材28の直進動作に同期させて、第2ハンド部材30をW2軸29を中心に反時計方向回りに回動させる。次に、第1ハンド部材28にカセット24内の半導体ウェハ23を保持させる。次に、後退動作手段により、直線補間のもと、第1ハンド部材28をカセット24から後退するように直進動作させる。同時に、復帰動作手段により、後退動作手段による第1ハンド部材28の直進動作に同期させて、第2ハンド部材30を時計方向回りに回動させる。
(もっと読む)
伸縮アーム
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。関節機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
ロボット制御装置
【課題】開始点から目標点まで特異点を通過させてロボットを動作させ、搬送速度を向上させると共に装置の立上げ時間を短縮させたロボット制御装置を提供する。
【解決手段】制御部14は、差分算出手段により、駆動軸の各々の差分θを算出する。時間算出手段により、予め設定可能な駆動軸の各々の速度条件と、上記差分θとから、駆動軸の各々の動作時間Tを算出する。比率算出手段により、上記算出された動作時間Tが最も長いB軸19を基準軸として、その基準軸の動作量に対する他のA軸17及びW軸21の動作量の動作比率を算出する。算出される動作比率は、B軸19を1として、A軸17は(−θAS/θBS)、W軸21は(θWS/θBS)となる。動作手段により、上記算出された動作比率でA軸17、B軸19及びW軸21の駆動軸の各々駆動させることにより、ロボット11を開始点Sの姿勢から特異点Oの姿勢まで動作させる。
(もっと読む)
ウエハ検出装置及びウエハ搬送装置
【課題】ウエハ搬送用のハンドが180°回転する構成のウエハ搬送装置において、ハンドに設けられたウエハ検出用のセンサ部の検出情報を本体側に支障なく伝達することを可能にする。
【解決手段】ウエハ搬送装置11は、本体13に対して回動軸21を介してハンド14が回動可能に支持され、ハンド14には第1光ファイバ及び第2光ファイバが、その第1端部が本体13と対向する位置で、かつ回動軸21に対して対称位置に配置され、第2端部が載置部19に載置されたウエハに光を出射及び反射光を受光可能に設けられている。本体13には、ハンド14が第1状態又は第2状態に配置された状態において、前記両光ファイバの第1端部の端面と対向する位置に投光部30及び受光部31が配置されている。ウエハの検出手段は、受光部31の受光量に基づいてウエハの検出を行う。
(もっと読む)
ワーク搬送ロボットおよび搬送方法
【課題】 本発明は、ワーク搬送ロボットを大型化することなく、高速搬送を可能とするハンドリングロボットを提供するものである。
【解決手段】水平に回転可能な第1アーム10と、前記第1アーム10の先端に前記第1アーム10の回転軸と平行な軸に回転支持された回転可能な第2アーム17と、前記第2アーム17の先端部に前記第2アーム17の回転軸と平行な軸に回転可能なフランジ21と、前記フランジ21にワーク把持部25とを備えたワーク搬送ロボットにおいて、前記第1アーム10の回転軸と平行な前記軸に少なくとも2つの出力軸を備えた減速機構16,20を備えたものである。
(もっと読む)
円盤状物の位置決め方法並びに、その方法を使用する円盤状物の位置決め装置、搬送装置および半導体製造設備
【課題】位置決め装置と搬送ロボットとを具える半導体製造装置における設備立ち上げ時の各ポートでの基準位置教示の時間短縮を目的とする。
【解決手段】ウエハ等の円盤状物47の円周と検出手段の軌跡43とが交わる2点W1、W2を検出し、この2点とこれらを結ぶ線分の垂直二等分線42上の特定点Oと円盤状物の半径rとを用いて円盤状物の中心位置Aを算出する。これにより搬送ロボットに位置決め作業をさせ、その結果を用いて搬送経路の修正ばかりでなく設備立ち上げの際の基準位置教示も大部分自動化できた。ノッチがある場合は、円盤状物の円周を検出手段の2本の軌跡で検出し、正しい中心位置を見いだす。またノッチを有する半径未知の円盤状物では、その円周を検出手段の、共にノッチに掛からない距離だけ互いに離間した3本の軌跡で検出して半径を求めることで、直径の異なるウエハを用いる混合生産も可能となった。
(もっと読む)
201 - 220 / 420
[ Back to top ]