
Fターム[3C007CV04]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が直線運動するもの (116) | 水平並進 (18)
Fターム[3C007CV04]に分類される特許
1 - 18 / 18
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
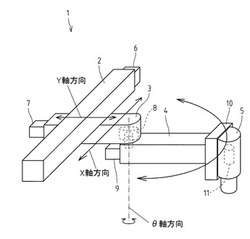
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
ピックアンドプレース装置

【課題】組立設備に組み込んで設置する際に、その省スペース化が図れるピックアンドプレース装置を提供する。
【解決手段】ハンド部24のプレース作動を許容して該ハンド部を支持する支持体26と、該支持体を昇降移動自在に支持して該ハンド部に上下方向のピック作動を伝達するピック作動伝達機構28と、該支持体に支持されたハンド部のピック作動を許容して該ハンド部にプレース作動を伝達するプレース作動伝達機構30とを備え、該ピック作動伝達機構に上下動を入力するピック作動駆動源32と該プレース作動伝達機構にプレース作動を入力するプレース作動駆動源34とが、該ハンド部のピック作動ストロークの下端位置よりも下方に設置される。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
ロボット
【課題】ピック&プレースの作業が可能なものにあって、比較的簡単な構成でありながらも、部品供給部と部品組付部との間の途中部位の障害物を容易に乗越える。
【解決手段】X軸方向に水平に延びるX軸レール6の前面側に、移動体7を直線移動可能に設ける。移動体7の前面部に、回動アーム8の基端側を、R1軸を中心に回動可能に連結する。回動アーム8の先端側に、下端に作業用ツール10を有する手首部9を、R2軸を中心に回動可能に連結する。回動アーム8内に、移動体7に対して回動アーム8を回動させるための、回動用モータ16、減速機17等からなる駆動機構13を設ける。回動アーム8内に、手首部9の絶対的な向きを一定に保持するための、第1のプーリ15、第2のプーリ21、ベルト22等からなる姿勢保持機構14を設ける。
(もっと読む)
基板搬送システム
【課題】コンパクトなレイアウトを採用可能とするロボットを備えた基板搬送システムを提供する。
【解決手段】本発明の基板搬送システムはロボット1を備え、その周囲に基板搬出入手段4及び基板処理装置5が配置される。ロボット1は、基板100が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直軸線17周りに回転駆動する回転駆動手段と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続され、水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
基板搬送ロボット
【課題】構造の大型化を防止しつつ、大型重量基板を安全且つ的確に搬送できるロボットを提供する。
【解決手段】本発明のロボット1は、基板が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直方向の回転軸線17周りに回転駆動する回転駆動手段14と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続される。水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
自動試験装置
【課題】Z軸方向に所定の負荷をかける機器の試験を行う自動試験装置において、Z軸方向へ所定の負荷をかける加重制御の管理可能な加重の幅を広くする。
【解決手段】X軸方向、Y軸方向、Z軸方向にそれぞれ移動するX軸移動ユニット2、Y軸移動ユニット3、Z軸移動ユニット4を備えた自動試験装置において、前記Z軸移動ユニット4に固定されX軸方向の下方に延びたアーム404の下端部に取り付けられた加重制御ユニット401と、前記加重制御ユニットの下側に取り付けられた作用子402を備え、前記加重制御ユニット401は、前記上側固定板401aに設けられた孔401eに上側固定板401aには摺動自在となるように貫設し、上部に前記下側稼動板401bの下方向の移動を係止する係止部を具備した圧縮バネ案内軸401dと、前記圧縮バネ案内軸401dに案内される圧縮バネ401cから構成されている。
(もっと読む)
吊り型ロボット
【課題】電源ケーブルや信号ケーブルを収納したケーブルベア(登録商標)がロボット本体の移動に伴って屈曲するとき、ケーブルどうしが互いに擦れあったり、ケーブルベアとケーブルとが擦れあったりすることを極力防止する。
【解決手段】複数のケーブルを上下に並列した状態で一体化してフラットケーブル29を構成し、このフラットケーブル29がケーブルベア22の外周側の側面に押し付けられ、且つ、フラットケーブル29のケーブルベア22への収納部分の両側を上方に傾けることによりフラットケーブル29がケーブルベア22の上下両内面から離れた状態に保持してフラットケーブル29の両端部を固定する。
(もっと読む)
ロボット
【課題】従来技術と同じようなサイズの部品を使用した場合でも、直動軸に懸架ユニットを懸架した構成において、全体の小形化を図ることができるロボットを提供する。
【解決手段】旋回ユニット3を構成する駆動部19を、直動軸4の側方においてケーブルベア15の曲面を持つ曲げ状態の曲げの内側に位置させてなるように旋回ユニット3に備えたので、駆動部19を、旋回ユニット3と連結された状態で直線移動するケーブルベア15の曲面を持つ曲げ状態の内側に位置するにしても何ら支障を生じることがない。これにより、ケーブルベア15の曲面を持つ曲げ状態の内側のデッドスペースを有効活用することができる。
(もっと読む)
パレタイザーのためのハンドリングロボット
本発明によれば、ハンドリングロボットは垂直伸縮マスト(11)を含み、垂直伸縮マスト(11)は、垂直に固定されたベース(20)及び同期された動作の複数のセクション(21〜23)を備え、前記動作は速度及び加速度が制御され且つ重力伸長動作及び動力退避動作を含み、それぞれのセクションは個々に駆動され、最後のセクション(23)はパレットに載せられる製品(3)を把持するためのヘッド(13)を担う。該ロボットは、異なるセクション(21〜23)を動かすための共通の駆動シャフト(30)を含み、前記シャフト(30)は、それらがそれぞれ伝達部材を経由して操作するセクション(21〜23)の移動に適した直径を有するホイールを含む。ホイール(31、32)及びそれらのセクション(21、22)の間の伝達部材は、対応するホイール上に巻き付くベルトから構成される。把持ヘッドを担う最後のセクション(23)に関しては、伝達動作がチェーンにより実行される。ハウジング(46)は、各動作伝達チェーンの自由端を受容して、格納し、それぞれ曲がったらせん経路を規定するノッチを備えたブロックの形態で作られる。 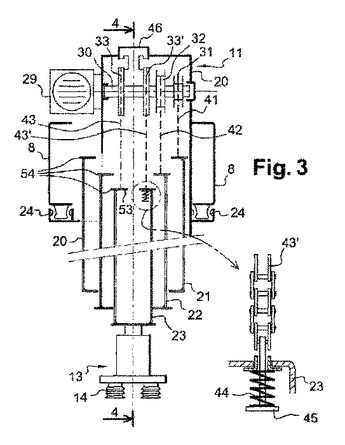 (もっと読む)
(もっと読む)
直交型ロボット
【課題】ロボットの製造コストをより低減する。
【解決手段】本発明にかかる直交型ロボット1では、X軸ロボット3,4の駆動源としての中空モータ17およびサーボモータ35と、これを制御するためのコントローラ2とが、各種ケーブル(50等)を介して電気的に接続されている。上記ケーブルは、上記各モータ17,35側から延びるモータケーブル51,52と、上記コントローラ2側から延びるメインケーブル50とを有しており、これら各ケーブル50〜52は、上記Y軸ロボット4のフレーム26の内部に形成された所定のスペースからなる結線部68で接続される。
(もっと読む)
作業補助装置
【課題】作業者が対象物を移動する作業を補助する作業補助装置を提供する。
【解決手段】作業補助装置100は、把持装置10と、把持装置10を回転軸Qの回りに回転可能に連結する移動装置20を備える。対象物Wは把持装置10と作業者Tにより保持される。作業者Tが対象物Wを回転させると、作業補助装置は、対象物Wの姿勢角と目標姿勢角の偏差が小さくなる方向の回転を対象物に与えると推定される「回転軸の移動方向と移動量」を指定する第1移動指令値を算出する。第1移動指令値に従って移動装置を移動させる。把持装置10と移動装置20は回転可能に連結されているため、回転軸Qが移動する際の対象物Wの回転は回転軸Qと作業者Tの位置関係で規定される。作業者Tは、回転軸Qが移動する際の対象物Wの回転を理解しやすい。作業補助装置は、作業者Tが理解し易いように対象物Wを移動させることができる。
(もっと読む)
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
付着式ピンセット用移載システム
【課題】付着式ピンセットに対して好適な新規の移載システムを提供する。
【解決手段】
微細部品を付着するための粘着材、この粘着材を先端に導くための導出パイプ、この導出パイプ先端に粘着材を送り出す手段、導出パイプ先端より突出及び後退して、付着した微細部品を離脱するスライドパイプからなる付着式ピンセット1を搭載するキャリア5と、このキャリア5を水平方向に走行案内する走行レール2,3と、キャリア5を上下方向に昇降案内する昇降レール4と、キャリア5を走行及び昇降レール2,3,4に沿って駆動する手段20,30,40と、スライドパイプを前進及び後退する手段とを備えた。
(もっと読む)
往復移動装置、半導体チップ実装装置及び実装方法
【課題】 移動室内に配置された移動部材に対して、駆動部により接触でもって案内しながらその往復移動を駆動することで、移動室の隙間部を介して連結される往復移動の対象物の移動を行う往復移動装置において、当該往復移動により移動室内に生じるパーティクルの室外への漏出を抑制して、清浄化環境での使用に対応可能とする。
【解決手段】 移動部材がその内部に配置されて上記往復移動がその内部にて行われる室であって、上記移動部材と当該室外に配置される往復移動の対象物とが連結される部分を往復移動可能に貫通させる隙間部が形成された移動室内において、上記移動部材の移動により圧縮される圧縮側空間の空気を、非圧縮側空間に移動させることで、上記移動室内の空気を循環させる循環経路とを備える。
(もっと読む)
吸着装置とその取付構造及び吸着装置を備えた搬送装置並びに画像形成装置
【課題】吸盤に対する清掃や交換等のメンテナンス作業が容易にできる吸着装置とその取付構造を提供する。
【解決手段】吸着装置60は、吸着ユニット40の取付板44に穿設された取付孔54に着脱自在に取り付けられる。その構造は、下端近傍に係止部66が形成された吸引用のパイプの下側に設けられた吸盤62と、パイプが挿通される筒部と、筒部の上端に形成された回動操作部74と、筒部の下端に固着され、取付孔54に挿通されて回動することにより、その取付孔54から抜き出し不能とされる係止プレート76とからなるストッパー部材と、筒部が挿通され、取付孔54を挿通不能な押さえ部材78と、回動操作部74と押さえ部材78との間の筒部に挿嵌される第1コイルばね80と、係止プレート76と係止部66との間のパイプに挿嵌される第2コイルばね82とを備える。
(もっと読む)
産業用ロボット
【課題】産業用ロボットのアーム部の剛性を確保しつつ、アームの駆動源である駆動用モータの小型化を可能とすることにより、安価な産業用ロボットを提供する。
【解決手段】産業用ロボットのアーム部を繊維強化樹脂からなるパイプ状構造物1によって形成し、産業用ロボットの本体重量の軽量化を行うと共に、アームの駆動源である駆動用モータの小型化を図ることで産業用ロボットを安価に構成する。
(もっと読む)
1 - 18 / 18
[ Back to top ]