
Fターム[3C007CV05]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が直線運動するもの (116) | 上下に並進 (42)
Fターム[3C007CV05]に分類される特許
1 - 20 / 42
原子炉内取扱機器用炉内挿入ガイド装置
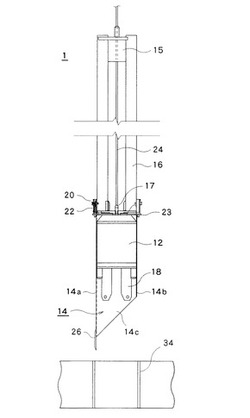
【課題】原子炉内における取扱作業時間を短縮する。
【解決手段】取扱ツール12と、グリッドガイド16と、取扱ツールが上方に抜けるのを防止するストッパーが上面に設けられるとともにストッパーが設けられた以外の領域にグリッドガイドが通る挿入ガイド14であって、二対の側面は、下面の四つの辺のうち一辺が他の三つの辺よりも下方に位置するか、または下面の四つの頂点のうち一つの頂点が他の三つの頂点よりも下方に位置するように構成された挿入ガイド14と、挿入ガイドが原子炉内の上部格子板34の格子枠に着床するための着床部23と、挿入ガイドをグリッドガイドと一体となるように把持する把持機構20と、把持機構によって挿入ガイドがグリッドガイドに把持されているのを解除し、挿入ガイドをグリッドガイドから切り離す解除機構22と、を備える。
(もっと読む)
ピックアンドプレース装置

【課題】組立設備に組み込んで設置する際に、その省スペース化が図れるピックアンドプレース装置を提供する。
【解決手段】ハンド部24のプレース作動を許容して該ハンド部を支持する支持体26と、該支持体を昇降移動自在に支持して該ハンド部に上下方向のピック作動を伝達するピック作動伝達機構28と、該支持体に支持されたハンド部のピック作動を許容して該ハンド部にプレース作動を伝達するプレース作動伝達機構30とを備え、該ピック作動伝達機構に上下動を入力するピック作動駆動源32と該プレース作動伝達機構にプレース作動を入力するプレース作動駆動源34とが、該ハンド部のピック作動ストロークの下端位置よりも下方に設置される。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
ロボット
【課題】全体の大きさや重量を大きくすることなく可搬重量を増やす。
【解決手段】水平多段式伸縮装置3のベース11を、直動ガイド13の長さより短い寸法に形成し、且つこのベース11の下面に同じく直動ガイド13の長さより短い寸法の平行状態をなす一対のレール摺動体12L、12Rを設けている。又、直動ガイド13を2本のレール17L、17Rと二つの連結端板18A(ひとつのみ図示)とから構成している。さらに一対のレールレール17L、17Rを連結するについて各レールの端面で各連結端板18Aをねじ止めする構成とした。
(もっと読む)
マーキング装置およびマーキング方法
【課題】マーキング装置およびマーキング方法において、識別マークを形成できる領域が狭いワークの場合であってもワークに効率よく識別マークを形成することができるようにする。
【解決手段】把持可能領域Hを有するワークWに識別マークMを形成するマーキング装置1であって、把持可能領域HにおいてワークWを把持する把持アーム部6と、把持アーム部6に設けられ、ワークWを把持するとともに、把持した位置に識別マークMの少なくとも一部を形成するマーキング把持部6bと、を備えるものを用いる。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法
【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
触力覚提示システム
【課題】的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供
【解決手段】人間に対し、力感覚を提示する回転関節型リンク機構(5)のパッシブ型力覚提示システムであって、人間が操作する操作部(6)と、前記操作部の位置を検出する位置検出部(7)と、操作部の自由度の数と同じ数よりなるブレーキを用いたパッシブ型力発生部(8)を用いて各パッシブ型力発生部の動作によって前記操作部に対する力としてそれぞれ直交する抗力をかけることができるブレーキ力伝達部(9)と、前記位置検出部の出力を入力して、前記パッシブ型力発生部を制御する制御装置(10)とを備えることを特徴とする装置であり,的確な力覚を提示することができる.また,前記操作部に加えられた力を検出する力検出部(11)を備える際には,この情報も用いて制御することにより力覚提示性能を改善することができる.
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
多関節ロボット及び生産設備の製造方法
【課題】ロボットを分解することなく移送でき、容易に設置できる及び生産設備の製造方法を提供する。
【解決手段】台座と、台座に立設され少なくとも上側ブロックと下側ブロックとを有するコラムと、コラムに設けられコラムに沿って移動する移動機構と、移動機構に連結された支持部材と、支持部材に支持され複数の関節を有するアームと、を有する多関節ロボットであって、上側ブロックが横倒し状態にまで揺動可能となるように上側ブロックと下側ブロックとを連結する可動部材と、上側ブロックが横倒し状態となった状態で上側ブロックを固定する固定部材と、を有して構成する。
(もっと読む)
医学用ツールを患者の体内で操作する装置
【課題】 最小侵襲外科手術に適したマニプレータを提供する。
【解決手段】 医学用ツールを患者の体内で操作する装置は、患者の体内に挿入可能な管321と、該管321により支持され且つ第一及び第二の軸線を有するジンバル継手330と、第一及び第二の軸線の周りで枢動し得るようにジンバル継手330により支持されたツール322と、管321を通ってジンバル継手330まで伸びる第一及び第二の細長いコネクタ350と、第一及び第二のコネクタ350を通じてジンバル継手330に力を加え、ツール322を第一及び第二の軸線の少なくとも一方の周りで枢動させ得るように第一及び第二のコネクタ350にそれぞれ作用可能に接続された第一及び第二のアクチュエータ355とを備えている。第一及び第二のコネクタ350は圧縮状態及び張力状態にて作用可能である。
(もっと読む)
産業用ロボット
【課題】動作速度の高速化などを図ることのできる産業用ロボットを提供する。
【解決手段】第1関節軸2を中空のボールねじスプラインシャフト12から形成すると共に、第1のアーム駆動用モータ8及び第2の作業軸駆動用モータ11を基台1内の固定ブラケット41に装着し、第2のアーム駆動用モータ9及び第1の作業軸駆動用モータ10を基台1内の可動ブラケット42に装着する。また、第2のアーム駆動用モータ9の回転トルクを第2関節軸4に伝える第1のプーリ軸27と第1の作業軸駆動用モータ10の回転トルクを作業軸6に伝える第2のプーリ軸34をボールねじスプラインシャフト12の内側に同軸に配置する。
(もっと読む)
ロボットのアーム回動範囲変更制御装置
【課題】ソフト制御上の可動制御範囲区域に対して物理ストッパの可動範囲区域を間違えて設定してしまうことを抑制でき、さらに、複数の可動制御範囲区域をアームの所定可動範囲内に確実に設定できるようにする。
【解決手段】ユーザーが複数の可動制御範囲区域のいずれかを設定すると、制御部9は、該可動制御範囲区域に対応する前記可動範囲区域において設定された2つの物理ストッパ中間角度値Kc[deg]を求め、物理被ストッパの現在位置の角度値をX[deg]とし、アームの移動角度をQ[deg]としたとき、QをQ=Kc−Xなる式で求め、Q>0のときには、アームを、他方の回転方向へ前記Qの角度だけ回転させ、Q<0のときには、アームを、一方の回転方向へ前記Qの角度だけ回転させることによりストッパ位置の示唆を行う。
(もっと読む)
基板搬送ロボット
【課題】構造の大型化を防止しつつ、大型重量基板を安全且つ的確に搬送できるロボットを提供する。
【解決手段】本発明のロボット1は、基板が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直方向の回転軸線17周りに回転駆動する回転駆動手段14と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続される。水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
ダブルアーム型ロボット
【課題】簡易な構成と省スペースを実現できるダブルアーム型ロボットを提供する。
【解決手段】搬送物2,3が載置されるハンド部23,33、各々が関節部で回動可能に連結された複数のアーム21,22,31,32を有し、ハンド部23,33がアーム22,32の一端に関節部で回動可能に連結される、第1及び第2の多関節アーム11,12と、第1及び第2の多関節アーム11,12の一端が、基端の関節部によって各々回動可能に連結されるアーム支持部13と、アーム支持部13の一端を鉛直方向に移動可能に保持し、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12を基端の関節部で回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12における基端の関節部以外の関節部での回動を行わせる第1及び第2の関節回動部とを備える。
(もっと読む)
多関節ロボット
【課題】駆動部からの発塵防止のためアーム自身を密閉構造とした多関節ロボットにおいて、密閉用の防塵カバーを固定するボルトの損傷と緩みを防止する。
【解決手段】肩関節部を中心に上腕を回動させる駆動源を備えた支持部材10に、防塵カバー31が取り付けられている。防塵カバー31と支持部材10とは、ガスケット36を介してボルト33で固定されている。防塵カバー31とガスケット36には所定の間隔でボルト33が貫通する穴が設けられ、穴に対向する支持部材10の面にタップ穴が形成されている。また防塵カバー31にはザグリ30が形成されている。防塵カバー31とボルト33の間にはカラー34と高弾性ゴムワッシャ35を介在させる。外力によって防塵カバーとボルトの間に相対的変位が生じても高弾性ゴムワッシャでこれを吸収し、ボルトの損傷と緩みを防止する。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、2台の駆動用モータ20を備え、制御部80は、2台の駆動用モータ20を制御するモータ制御部81を備えている。モータ制御部81は、一方の駆動用モータ20と、他方の駆動用モータ20とを個別に制御している。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材とを備えるとともに、支持部材を上下動させる上下駆動機構、および支持部材を水平方向に移動させるための水平駆動機構、および上下方向を軸方向とする所定の中心軸を中心に前記支持部材を回転させるための回転駆動機構を備え、前記上下駆動機構、前記水平駆動機構、前記回転駆動機構は、それぞれ複数の駆動用モータを備える。例えば上下駆動機構においては、上下駆動用モータ20、プーリ28,29とベルト30、上下ブレーキ機構24、減速機21、減速機の出力軸に設けられたピニオン22をそれぞれ2組有し、1本のラックに2個のピニオン22が噛み合い駆動する。
(もっと読む)
ロボット
【課題】フラットケーブルを剥き出しで使用しても、他の物体へ干渉することなく、フラットケーブルが損傷しない構造を持つロボットの提供。
【解決手段】ロボット1を形成するアーム8、第1昇降部11および第2昇降部12は鉛直なR軸を中心に旋回可能に形成されている。また、第1昇降部11はアーム8に対して上下移動可能に接続され、さらに第2昇降部12は第1昇降部11に対して上下移動可能に連結されている。第2昇降部12にはワークに処置を施すツールを取り付け可能な回転軸用モータ30が取付けられており、回転軸用モータ30へ電力を供給するためのフラットケーブル32がアーム8から引き出されて回転軸用モータ30へと接続されている。フラットケーブル32のアーム8および第2昇降部12への取付部位の間は下方に垂れ下がっており、第1昇降部11および第2昇降部12がアーム8に対して最も下降した場合に、この垂れ下がり部45は第2昇降部12の下端46よりも上方に位置している。
(もっと読む)
1 - 20 / 42
[ Back to top ]