
Fターム[3C007CY15]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 直線移動機構レール、スライダ等の工夫 (70)
Fターム[3C007CY15]の下位に属するFターム
走行体のガタ、ズレを防止するもの (10)
Fターム[3C007CY15]に分類される特許
1 - 20 / 60
ロボット
【課題】 可動部に設けられた押圧ローラおよび離間ローラの交換作業が容易になるロボットを提供すること。
【解決手段】 ロボットAに、開口15を備えたケース部材10と、開口15を塞ぐシャッタ50と、ケース部材10に移動可能に取り付けられたテーブル本体31と、テーブル本体31の移動方向の両側でシャッタ50を開口15の縁部側に押圧する押圧ローラ32aと、押圧ローラ32a間でシャッタ50を開口15の縁部から離間させる離間ローラ32bとを設けた。そして、テーブル本体31の一方側に設置される押圧ローラ32aと離間ローラ32bと、テーブル本体31の他方側に設置される押圧ローラ32aと離間ローラ32bとを一対の支持部材33で支持し、一対の支持部材33をそれぞれねじ37を用いてテーブル本体31の移動方向の一方側および他方側からテーブル本体31に対して着脱可能にした。
(もっと読む)
搬送装置

【課題】シートが伸びたことを検知し、作業者に報知することができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、可撓性のシートとを有する。スライドユニット30は、その移動方向に沿って、シートを収容し、スライドベース31と、方向転換部とを有する。スライドユニット30には、シートが所定の長さ以上の伸びを発現したときに該シートの過剰な伸びを作業者に報知する報知手段が設けられている。
(もっと読む)
搬送装置
【課題】シートの交換作業を容易に行うことができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、これらの上面を覆う防塵用の可撓性のシートとを有する。スライドユニット30は、スライドベース31と、その移動方向に沿って防塵用のシートを収容し、シートの方向を転換するためのローラからなる第1の方向転換部41と第2の方向転換部42とを有する。スライドベース31には、それぞれシートに向かって開口し第1の方向転換部材を支持する第1の支持部31cと、第2の方向転換部材を支持する第2の支持部32cが形成される。第1の方向転換部材41及び第2の方向転換部材42は、第1の支持部31cと第2の支持部32cに容易に着脱可能に嵌合する。これによって、スライドベース31上にワークや工具などが搭載されていても、シートの交換が容易である。
(もっと読む)
ロボット
【課題】 ケース部材の開口縁部とシャッタとの隙間からケース部材の内部に塵埃や異物が浸入することを防止できるロボットを提供すること。
【解決手段】 軸方向に沿う一面が開口したケース部材10と、ケース部材10の軸方向に移動可能な状態でケース部材10に取り付けられた可動部材20と、可動部材20を移動させる駆動装置40と、ケース部材10の開口15を塞ぎ可動部材20に位置する部分が開口15の縁部から離間されるシャッタ50とを備えたロボットAを構成した。そして、可動部材20の移動方向の両端に、シャッタ50の外面と開口15の縁部とに接触するワイパ34を着脱可能に設けた。ワイパ34の可動部材20への取り付けを、可動部材20に係合部36を設けるとともに、ワイパ34に被係合部37を設けて、ワイパ34を係合部36に対してスライドさせることにより行った。
(もっと読む)
産業用ロボット
【課題】落下防止機構の故障発生確率を低くすると共に、万一故障が発生した場合でも該故障に容易に気付くことができるようにする。
【解決手段】第1スライダ8は固定ベース7に対して垂直方向に移動可能であり、第2スライダ10はこの第1スライダ8に垂直方向に移動可能である。第2スライダ10は、第1スライダ8が移動されると、プーリ22A、22B及びベルト23を有する第2スライダ用移動機構11により、第1スライダ8に対してこれより先行して移動させられる。落下防止機構24は、第1スライダ8における前記両プーリ22A、22B間の中間部に支軸26により回動可能に支承されて、第1長孔部27A及び第2長孔部27Bを有するレバー25と、固定ベース7に設けられた第1ピン29Aと、第2スライダ10に設けられた第2ピン29Bとを有し、第1ピン29A及び第2ピン29Bを前記支軸26を中心として点対称配置とした。
(もっと読む)
ロボット
【課題】全体の大きさや重量を大きくすることなく可搬重量を増やす。
【解決手段】水平多段式伸縮装置3のベース11を、直動ガイド13の長さより短い寸法に形成し、且つこのベース11の下面に同じく直動ガイド13の長さより短い寸法の平行状態をなす一対のレール摺動体12L、12Rを設けている。又、直動ガイド13を2本のレール17L、17Rと二つの連結端板18A(ひとつのみ図示)とから構成している。さらに一対のレールレール17L、17Rを連結するについて各レールの端面で各連結端板18Aをねじ止めする構成とした。
(もっと読む)
一軸ロボット
【課題】スライダ30が特定の範囲で移動と停止を繰り返し、同じ位置に頻繁に停止することがあったとしても、当該停止位置で塵埃がこびりつく等の不具合を防止する。
【解決手段】略直方体形状の外殻を有する中空のケーシング11の上面に配置されたスライダ30と、前記ケーシング11に設けられ、且つ前記ケーシング11の上面に形成された開口部17を介して前記スライダ30を前記ケーシング11の長手方向に往復移動させる駆動機構と、前記ケーシング11の開口部17を遮蔽するように前記スライダ30を貫通する平板状のシャッタ40と、前記スライダ30の移動方向両側に設けられ、前記シャッタ40の上面と非接触状態で前記シャッタ40下面を吸引することにより、当該スライダ30の両側での前記シャッタ40の浮きを規制する一対の吸引手段34とを備えている。
(もっと読む)
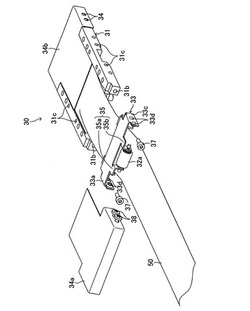
搬送装置
【課題】シートの交換作業を容易に行うことができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置2と、スライドユニット3と、可撓性のシート5とを備える。直動装置2は、レール10とスライドベース31とを有する。スライドユニット3は、その移動方向に沿って、シート5を収容し、スライドベース31と、該スライドベース31の移動方向の両端部に着脱可能に設けられたガイドロール支持ブロック32と、方向転換部4とを有する。方向転換部4は、第1の方向転換部材41と第2の方向転換部材42とを有する。第1の方向転換部材41は、スライドベース31に複数設けられ、シート5の下面を上方に押し上げて張架する。ガイドロール支持ブロック32に設けられた第2の方向転換部材42によって上面を押さえつけられたシート5は、開口部11を覆うよう案内される。
(もっと読む)
搬送システム
【課題】本発明は、大幅に搬送サイクルタイムを向上させた搬送システムを提供するものである。
【解決手段】ワーク10を直線的に搬送する搬送システム1であって、駆動機構がリニアモータ2から構成され、前記リニアモータ2の可動子5上に前記ワーク10を着脱する吸引パッド7を昇降可能にする上下機構6を備えたものである。
(もっと読む)
軸用スライド装置
【課題】 スライダ移動時にベルト状カバーがフレームに接触し、発塵するという欠点を解消し、防塵効果の向上を図った軸用スライド装置を提供すること。
【解決手段】 固定されたフレームの開口部内をステージが移動し、前記開口部をステージ移動方向に全面に亘って覆うベルト状カバーを設けた軸用スライド装置において、スライダ移動時にベルト状カバーの幅方向両端部のエッジと接触するフレーム部に開口部に沿った小溝を設けたことを特徴とする軸用スライド装置とした。
(もっと読む)
フロッグレッグ型移載装置
【課題】ワークを同一水平面内で直線移動させて移載するフロッグレッグ型移載装置において、横揺れ防止を実現すると共に、パーティクルの発生を減らす。
【解決手段】フロッグレッグ型移載装置において、2本のフリーアームは、基台に一端が第1回動軸を介して取り付けられている。移載アームは、2本のフリーアームの他端に第2回動軸34を介して連結され、ワークを載置する。同期機構35は、2本のフリーアーム同士を連結して横揺れを抑制する。同期機構35において、直線移動部材47は、移載アームの移動方向にスライド自在に支持されている。回動部材48は、直線移動部材47に回動自在に支持されている。2本のロッド部材45は、第2回動軸34に軸支された第1端57と、回動部材48に軸支された第2端58とを有する。
(もっと読む)
ワーク搬送装置
【課題】輻射熱を受けやすい部材から効率よく熱を逃すことができるワーク搬送装置を提供する。
【解決手段】ワークを搬送するためのワーク搬送機構を備えたワーク搬送装置であって、ワーク搬送機構の外表面各所には、冷媒循環用の冷却パイプ84が付設されており、冷却パイプ84は、上記外表面に対して弾性部材85を挟んだ状態で固定具86を介して押圧固定されている。
(もっと読む)
多段構造のアクチュエータ
【課題】長尺の案内レールを使用することなく被駆動体をロングストロークにわたって搬送可能とする。
【解決手段】この多段構造のアクチュエータ1は、複数の駆動ユニット10A〜10Dそれぞれが、二つのボールねじ11A,11Bを有している。二つのボールねじ11A,11Bは、相互のナット5,5が逆方向に駆動され、また、隣り合う駆動ユニット10A〜10Dのナット5,5相互が連結されている。さらに、各駆動ユニット10A〜10Dには、案内レール2が取り付けられ、これを支持する複数の案内部材3は、各駆動ユニット10A〜10D毎に軸方向に離間してベースBに配置されている。そして、各案内レール2は、各駆動ユニット10A〜10Dの移動に伴って、複数の案内部材3に順次に受け渡されるようになっている。
(もっと読む)
直線ロボットにおける密閉バンドの結合構造
【課題】直線ロボットにおける密閉バンドの結合構造を提供する。
【解決手段】本発明は、ベルト、ボールスクリュー、リニアモータータイプの駆動手段によりテーブルを移動する直線ロボットにおける密閉バンドの結合構造に係り、さらに詳しくは、永久磁石を用いて移動するテーブルと密閉バンドを摩擦なしに作動させて摩擦騒音、粉塵発生、摩擦による密閉バンドの変形がなく、使用寿命を延ばすことができ、完璧なクリーン状態を維持し、直線ロボットの精密性及び作動性を常に最適な状態で提供できるようにした直線ロボットにおける密閉バンドの結合構造に関する。
(もっと読む)
ロボット
【課題】 シャッタ部材がケース部材の軸方向から横にずれた状態になることを防止できるロボットを提供すること。
【解決手段】 上面が開口した収容部を備えたケース部材10と、収容部から一部を上方に突出させた状態で収容部に収容され、軸方向に移動可能に取り付けられた可動部材20と、可動部材20を軸方向に移動させる駆動装置30と、収容部の軸方向の両端に両端部を固定された状態で収容部の開口を上方から塞ぎ、可動部材20に位置する部分が可動部材20によって上方に持ち上げられるシャッタ部材40とで単軸ロボットAを構成した。そして、シャッタ部材40の下面における幅方向の両側部分に対向する収容部の開口縁部の上面に、マグネットシート15aを貼り付け、マグネットシート15aの上面にテフロンテープ18を貼り付けた。
(もっと読む)
電動アクチュエータ
【課題】終点に移動した移動体を被押し当て体に押し当てることができ、被押し当て体のクランプ又は被圧入体への圧入を可能にした電動アクチュエータを提供する。
【解決手段】電動アクチュエータ11は、スライダ13の位置情報を検出するエンコーダ20と、スライダ13の速度調節器42a,42bと、スライダ13の移動距離を学習する学習部と、学習部を動作させるための操作釦44a,44bと、電動モータMに駆動信号を出力する制御部30と、スライダ13の推力調節器43とを有する。電動アクチュエータ11の制御部30は、スライダ13を終点に位置させた後、推力調節器43の操作に応じて設定された推力に基づき電動モータMに駆動信号を出力して、スライダ13に推力を発生させてスライダ13をワークに押し当てる。その結果、挟持体と電動アクチュエータ11のスライダ13とでワークをクランプすることができる。
(もっと読む)
基板搬送装置
【課題】装置の近傍に基板を搬送したときに、基板の下方にスライダベースが存在しないようにすることができる基板搬送装置を提供することを課題とする。
【解決手段】基板搬送装置1であって、本体部10に支持された第一スライダベース20と、第一スライダベース20の第一ガイドレール22に沿って移動自在な第二スライダベース30と、第二スライダベース30の第二ガイドレール32に沿って移動自在なハンド部材40と、第二スライダベース30に連動してハンド部材40を移動させる連動機構50とを備え、連動機構50は、第二スライダベース20に連動して回転する第一連動ギヤ51と、第一連動ギヤ51に対してギヤ比が小さい第二連動ギヤ53とを備え、第二スライダベース20に第一連動ギヤ51及び第二連動ギヤ53が取り付けられ、第一連動ギヤ51に連動する第二連動ギヤ53によってハンド部材40が送り出される。
(もっと読む)
真空内使用のためのロボット
ロボットは、リソグラフィ装置の真空チャンバ内で対象物を位置決めする。ロボットの第1コンポーネントは、並進軸に沿って対象物を位置決めするために真空チャンバ内に配置される。シャフトは、シャフトの対称軸が並進軸に対して垂直になるように第1コンポーネントを支持し、第2コンポーネントは、対称軸の周りでシャフトを回転させ、かつシャフトを対称軸に対して平行方向に移動させる。第2コンポーネントは、シャフトの外周面に沿ってガスを導入するように構成されたガスベアリングと、第2コンポーネントガスベアリングによって導入されたガスを排気するように構成された排出シールとを含む。ロボットは、炭化水素分子のガス放出を約0〜200a.m.u.の範囲に実質的に減少または除去し、よってロボットは極端紫外線(EUV)フォトリソグラフィ用途での使用に適する。 (もっと読む)
吊り型ロボット
【課題】走行レールに対する支柱の設置位置の変更を可能とすると共に、支柱の位置変更の作業を行う際の安全性を確保する。
【解決手段】支柱上に水平に設けられた支持プレート3に走行レール4を取付ける。走行レール4の上面部に、径小な第1円筒部14と径大な第2円筒部15とを一体に備える取付部7を設ける。支持プレート3の先端部に上面から見て円弧状の立下り壁部3aを介して薄肉な被取付部16を設ける。被取付部16に、取付部7の第1円筒部14が開口部から矢印A方向に水平に挿入されるU字状切込み部16aを形成する。第1円筒部14がU字状切込み部16aの奥部まで挿入された状態で、被取付部16の先端部のU字状切込み部16aの開口部両側部分に、第2円筒部15の投影面から露出した一定長さの露出端部16b,16bが生ずる。
(もっと読む)
電動グリッパ装置
【課題】低い均等なワーク把持力で把持することが可能であるとともに、一対の把持部材でワークを把持したときのワークのセンタリング(中心位置決め)精度も向上する電動グリッパ装置を提供する。
【解決手段】一対の把持部材4の直線摺動を案内するレール6を、それぞれの把持部材について1本ずつ、しかも、互いにはレール長さ方向にずらすとともに、レール長さ方向とは直交する方向に離してレール台3に対設する。一対の把持部材5のそれぞれを、その片面に設けられたスライド部7をそれぞれのレール6に摺動自在に嵌合させた片持構造として、各レールに個別に摺動自在に装着する。
(もっと読む)
1 - 20 / 60
[ Back to top ]