
Fターム[3C007ET09]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 直線摺動型 (302) | サイドクランプ (24)
Fターム[3C007ET09]に分類される特許
1 - 20 / 24
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
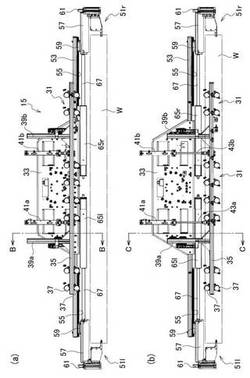
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体

【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
産業用ロボット
【課題】搬送対象物が上下方向で重ならないように配置される第2配置位置と産業用ロボットとの間にゲート部が配置されていても、本体部に対するハンドの旋回半径を小さくしつつ、ハンドとゲート部との干渉を防止することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、第1ハンド3および第2ハンド4と、アーム5と、本体部6とを備えている。第1ハンド3の基端部と第2ハンド4の基端部とは、上下方向で重なるようにアーム5の先端部に取り付けられている。第1ハンド3と第2ハンド4とは、アーム5に対して個別に回転可能であり、かつ、上下方向から見たときにアーム5に対して共通の回転中心C1を中心にして回転可能である。また、第1ハンド3と第2ハンド4とは、上下方向から見たときに屈曲するように形成され、かつ、上下方向から見たときに回転中心C1を通過する所定の仮想線に対して略線対称に形成されている。
(もっと読む)
エッジグリップ装置、及びそれを備えるロボット。
【課題】 半導体プロセス用ウエハを把持した後、素早く移動させることができるエッジグリップ装置を提供する。
【解決手段】 チャックハンド1は、半導体プロセス用ウエハ3をフロントガイド12に向かって押圧して半導体プロセス用ウエハ3を把持するプッシャー25を有する押圧機構14を備えている。押圧機構14は、プッシャー支持体22と、緩衝部材28とを更に有している。プッシャー支持体22は、進退できるよう構成され、前後にスライドできるようにプッシャー25に設けられている。プッシャー支持体22は、その前方に隙間26aがあいている。隙間26aには、反発力が小さく弾性変形可能な緩衝部材28が介在している。プッシャー支持体22は、前進すると、緩衝部材28を介してプッシャー25を押されて前方に移動させる。プッシャー25は、半導体プロセス用ウエハ3に当たって押し付けられる。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチの変更動作を行う場合であっても、構成の簡素化が可能でかつハンドに搭載される基板を適切に把持することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、所定のピッチで上下方向に重なるように配置される基板の搭載部を有する複数のハンドと、搭載部間のピッチを変えるピッチ変更機構と、ハンドに搭載される基板を把持するための把持機構24とを備えている。把持機構24は、複数の基板の把持部80と、基板の把持方向へ把持部80を付勢する複数の付勢部材と、把持部80に当接して基板からの退避方向へ複数の把持部80を移動させる移動部材82とを備えている。複数の把持部80および複数の付勢部材のそれぞれは、複数のハンドのそれぞれに保持され、移動部材82は、把持部80が基板を把持しているときに把持部80から離れている。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、複数のアームを有する伸縮自在なリンク機構20と、その動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され、基板10を載置するための載置部5とを備え、載置部5には、基板10の側部と当接して係止する係止部5a、5bが設けられる。第3の左アーム3L、第3の右アーム3Rの先端部には、第3の左アーム3L、第3の右アーム3Rに設けられた凸状の駆動支持部31L、31Rと、凸状の駆動支持部31L、31Rによって駆動される従動機構部6とを備える付勢手段9が設けられる。従動機構部6は、凸状の駆動支持部31L、31Rと係合摺動可能な長孔62を有する従動部61と、従動部61の長孔62内における凸状の駆動支持部31L、31Rの移動に応じて載置部5の係止部5a、5bに向って案内移動される付勢部6aとを有する。
(もっと読む)
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつ小型化できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、サンルーフ部材3を把持して搬送する搬送ロボット4と、ボルトを締め付けるナットランナおよびCCDカメラを有する取付ロボット5と、搬送ロボット4および取付ロボット5を制御する制御装置6と、を備える。制御装置6は、搬送ロボット4を制御して、サンルーフ部材3を把持してボディ2のインナパネル2Aに搬送し、取付ロボット5を制御して、CCDカメラによりサンルーフ部材3のボルト穴およびインナパネル2Aを撮影して、これらボルト穴およびインナパネル2Aの位置を算出し、これら算出した位置に基づいて取付ロボット5の動作を補正して、ナットランナによりサンルーフ部材3の2箇所をインナパネル2Aに固定する。
(もっと読む)
ワーク運搬装置
【課題】回動可能なアームに連結されたフレームと、そのフレームに支持された第1乃至第3のクランプ装置とを有し、その第1乃至第3のクランプ装置によってワークを把持して運搬するワーク運搬装置において、1台のワーク運搬装置によって、各種形態のワークを運搬できるようにする。
【解決手段】第1及び第2のクランプ装置9,9Aを互いに接近又は離隔可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのクランプ爪14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
ディスクチャック機構およびディスクハンドリングロボット
【課題】
複数枚のチャックされたディスクを1枚ごとに効率的に受け渡しができ、ディスク検査処理のスループットを向上させることができるディスクチャック機構およびディスクハンドリングロボットを提供することにある。
【解決手段】
この発明は、中心に開口を有するディスクの内周と外周の2点でディスクをチャックする場合において、チャック部材(フィンガ)の1つにはディスクの内周に対応して所定間隔で谷溝が複数設け、他のチャック部材(フィンガ)には前記のチャック部材(フィンガ)に対して奥に向かって距離が開く傾斜(例えば階段状の切込み段差)もって谷溝を形成して、チャックの開閉(部材の接近、離間)により複数枚のディスクのうちの先頭の1枚のディスクのみの内周と外周とをチャックするようにしている。
(もっと読む)
物品保持装置及び物品搬送装置
【課題】異形形状の被搬送物品であっても、安定して保持できる物品保持装置を提供。
【解決手段】互いに対向するとともに眼鏡レンズ用基材1の外周部を保持する一対の保持部21と、これらの保持部21を互いに近接離隔させる駆動部22とを備える。一対の保持部21は、それぞれ駆動部22に連結されるアーム部25と、これらのアーム部25にそれぞれ2個設けられる当接部26とを有し、一方の保持部21は、2個の当接部26が独立して進退自在にアーム部25に設けられ、これらの当接部26とアーム部25との間に弾性部材28が設けられる。そのため、4個の当接部26の少なくとも3個が眼鏡レンズ用基材1の外周部に当接することになるので、当接部26の片当たりがなくなり、保持部21で眼鏡レンズ用基材1が安定して保持される。
(もっと読む)
半導体装置の製造方法
【課題】ハンドを用いた半導体ウエハを搬送する工程において、異物の発生を低減することのできる技術を提供する。
【解決手段】ロッド17はピストン16に固定されており、シリンダ15には第1空間18に接続されている第1圧力ライン19および第2空間20に接続されている第2圧力ライン21が設けられており、ピストン16には貫通穴22およびこの貫通穴22に嵌め込まれたネジ23が設けられている。第2圧力ライン21を閉じた状態で第1空間18を第1圧力ライン19から真空引きすることによって、ピストン16が移動して可動部13が可動し、第1圧力ライン19を閉じた状態で第2空間20へ第2圧力ライン21から空気を流入することによって、ピストン16が移動して可動部13が可動する。
(もっと読む)
基板移載装置
【課題】フォトマスク等の基板の移載が容易に行える基板移載装置を提供する。
【解決手段】本発明による基板移載装置100は、ベース部111に固定されたシャフトを中心に回転可能な回転胴部112と、回転胴部112の側面に上下動可能に取り付けられたアーム部120と、アーム部120の先端部に水平方向に回転可能に取り付けられた把持部130とを備える。把持部130は、上下動可能な下側把持爪133と上側把持爪134とによって、移載対象となる基板を垂直に立てた状態で上下方向に把持する。更に、把持部130は、垂直に立てた状態で把持されている基板に垂直な軸を中心に微小角度回転することができ、基板の重さでアーム部120がたわんで把持部130が傾いてしまうような場合にも、基板を水平に保持することができる。
(もっと読む)
ロボットハンドおよび基板搬送ロボット
【課題】 既存のロボット本体を交換することなく、基板の搬送可能領域を大きくすることができる基板搬送ロボットのロボットハンドを提供する。
【解決手段】 ロボットハンド20を伸縮状態とすることによって、ロボットアームの先端部の可動領域では、ウェハ21の搬送に必要な可動領域に達しない場合であっても、ウェハ21の搬送に必要なウェハ21の可動領域を得ることができる。これによってロボット本体を交換することなく、搬送元位置または搬送先位置の変更可能な範囲を広げることができる。またロボットハンド20を縮退状態とすることで、ロボットアームを構成するアーム部分が他の装置と干渉する可能性を減らすことができ、ロボットの移動における制約を少なくすることができる。
(もっと読む)
リング搬送用ハンドとそれを用いた搬送装置
【課題】 リングのセンタリングをリングの把持と同時に高精度に行うことができるリング搬送用ハンドとそれを用いた搬送装置を提供する。
【解決手段】 リング状の被搬送物の内側もしくは外側に挿入される1個の円筒形の固定爪と、同じくリング状の被搬送物の内側もしくは外側に挿入される2個の円筒形の可動爪と、2個の円筒形の可動爪を同時に駆動するエアシリンダとを備えたリング搬送用ハンドにおいて、これら3個の円筒形の爪が3角形状に配置され、2個の円筒形可動爪は、その中心を結ぶ線に直角で、円筒形固定爪の中心を通る線と平行に移動する構成とする。これら3個の円筒形の爪はリングの把持時にはリングを把持し、かつ、3点でリングと接触する。
(もっと読む)
基板保持装置
【課題】把持の際に基板の載置位置がずれることを防止し、基板に対する処理精度を向上させる。また、この載置位置のずれの防止及び処理精度の向上を図りつつ、複数の基板を同時に搬送して処理速度を向上させ、基板のエッジ部又はエッジ部の近傍を把持してパーティクル等による汚染を防止する基板保持装置の提供。
【解決手段】5枚のエンドエフェクタ21のそれぞれに配置され、往復移動して基板Pの端縁に当接、離間することで基板Pの端縁を把持する爪部21A〜21Cと、一端のそれぞれが爪部21A〜21Cに接続され、他端のそれぞれが支持部222A〜222Cに接続されたスチールテープ221A〜221Cと、支持部222A〜222Cを往復移動させる駆動シリンダ224A,224Cとを備え、駆動シリンダ224A,224Cを駆動してスチールテープ221A〜221Cを往復移動させることで爪部21A〜21Cを同期して往復移動させる。
(もっと読む)
基板移送装置
【課題】シリンダ駆動方式の移動フィンガを有する基板移送装置を提供する。
【解決手段】基板移送装置は、駆動手段によって動作が制御されるロボットアーム部と、前記ロボットアーム部の先端に設けられ、基板Wが置かれるブレード120と、前記ブレード120に設けられ、前記ブレード120に置かれた基板Wを正位置に位置させると同時に基板Wを固定するクランピング部材130とを含む。
(もっと読む)
カンチレバーパネル移送装置
【課題】パネルのサイズによって移動されるクランピングキャリアーを一対のカンチレバーから構成して全体的な構造が簡単なカンチレバーパネル移送装置を提供すること。
【解決手段】本発明のカンチレバーパネル移送装置を成す構成手段は、所定の駆動手段によってサブテーブルとワークテーブルとの間を往来する移動体と、移動体の上面に設けられる一対のキャリアー移動手段と、キャリアー移動手段によって移動体の長手方向に往復運動できる移動ブロックと、移動ブロックと一端が結合されてキャリアー移動手段によって移動され、互いに平行に向き合っている二つのカンチレバークランプキャリアーと、二つのカンチレバークランプキャリアーにそれぞれ結合されて移送されるパネルをクランピングし、カンチレバークランプキャリアーの長手方向に沿って移動可能なグリップ手段と、を含んで成る。
(もっと読む)
把持装置
【課題】 ガラス基板等の薄板状ワークを把持して搬送を行う把持装置において、複数のワークを搬送するのにサイクルタイムを短くすることのできる把持装置を提供する。
【解決手段】 ベースに固定された2本のフォーク2と、ベースの左右に固定した2個の位置決めシリンダ3と、フォークの根本に固定されたクランプシリンダ4と、クランプシリンダに連結されるとともにフォーク先端でガイドされた連結棒6と、位置決めシリンダおよび連結棒に固定された2対のクランプ部材8と、クランプシリンダの動作を規制するストローク規制部材10をピストン先端に固定したストッパシリンダ5より構成される把持装置であり、クランプシリンダのストロークをストローク規制部材が規制するとともに、ストッパシリンダの動きにより把持位置を2箇所に制限した把持装置を構成する。
(もっと読む)
1 - 20 / 24
[ Back to top ]