
Fターム[3C007EU08]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | カム式 (98)
Fターム[3C007EU08]の下位に属するFターム
確動式 (46)
Fターム[3C007EU08]に分類される特許
1 - 20 / 52
クランパ、水室内作業装置およびクランプ方法
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
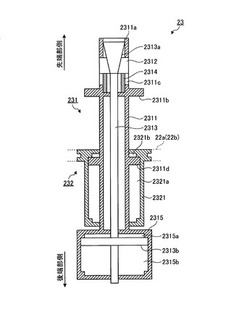
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
クランパおよび水室内作業装置

【課題】管材を安定的にクランプ保持できるクランパおよびこのクランパを備える水室内作業装置を提供すること。
【解決手段】このクランパ23は、挿入部2311aを管材に挿入して管材をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。また、クランプ機構231が、挿入部2311aを有するクランプ本体2311と、挿入部2311aから突出して管材に摩擦接触すると共に挿入部2311aの挿入方向に進退可能なコッタ2312と、挿入部2311aの挿入方向逆側に牽引されたときにコッタ2312を押圧して挿入部2311aから突出させるピストンロッド2313と、クランプ本体2311に一体化されてピストンロッド2313を牽引するロッドシリンダ2315とを備えている。
(もっと読む)
把持装置、搬送システム、把持制御方法
【課題】把持した複数の物体のうち少なくとも1つを個別に開放する技術を提供する。
【解決手段】対向面にピン33を有し、弾力が加えられる複数のバネ爪31と、バネ爪31の対向面の間に設けられ、移動位置に応じてピン33のいずれかに当接することで一対のバネ爪31が把持しているコネクタ101を開放させるカムブロック41と、カムブロック41を垂直方向に移動させるブロック駆動部51と、一対の狭持板であって先部13がバネ爪31それぞれの間に挿入されるリジッド爪12と、リジッド爪12をバネ爪31の弾力方向に移動させる本体部11とを有する把持装置である。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換すると共に復帰ばね機能を持つ方向変換部材と、を具備した構成になっているので、駆動力の直角方向への変換ができるだけでなく、方向変換部材が復帰ばね機能を備えているので、別途復帰用のばね部品を設ける必要はなく、それによって、グリッパの小型化を図ることができる。
(もっと読む)
ロボットハンド装置
【課題】 人間の手のように種々の手の動作表現をすることができるロボットハンド装置を提供する。
【解決手段】 ロボットハンド装置10は、基部12から延設される複数の指機構14と、指機構14を作動させるために指機構14に対してタペット機構16を介して連結される第1回動ローラ18及び第2回動ローラ20と、第1回動ローラ18に対して動力を伝達する第1駆動モータ22と、第2回動ローラ20に対して動力を伝達する第2駆動モータ24とを備える。第1回動ローラ18と第2回動ローラ20とは、同軸に配置されると共に個別に回動自在に構成されている。
(もっと読む)
遠隔操作用把持工具
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
電動ピンセット
【課題】 電動でピンセットの把持部を閉成状態で回転させると共に、該回転量及び開閉量を調整可能なこと。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成した後、スイッチ33を動作すると、モータ31を第1方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20の結合部22c及び端部21a,22aを回転させるものである。
(もっと読む)
電子部品取り付け用グリッパー装置
【課題】本発明は、構造が簡単で、高精度位置移動が必要なところで、容易く高精度位置移動を具現することができる電子部品取り付け用グリッパー装置に関する。
【解決手段】本発明による電子部品取り付け用グリッパー装置は、微細部品の中心に向かって水平移動する支持部と、前記支持部と共に移動し、微細部品を把持するフィンガーを備えるグリッパーと、前記フィンガーが前記微細部品の中心に向かって距離が狭くなるように張力を提供する弾性手段と、前記グリッパーが水平方向に移動するようにガイドするガイド手段と、垂直往復移動して前記支持部を水平方向に往復移動させることで、前記グリッパーを開閉させるカム部と、を含む。
(もっと読む)
電動ピンセット
【課題】 電動ピンセットの把持部を閉成状態で回転すると共に把持効率を増加すること。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成後、スイッチ33を動作すると、モータ31を第1方向と同一方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20を回転させると共に、内側辺と結合部材24とを回動自在にする第1及び第3回動部710,730と、第1及び第2固定側部材26,27を回動自在にする第2及び第4回動部720,740とを備えたものである。
(もっと読む)
空気圧制御式把持装置
【課題】対象ワークを外側からまたは中空の場合は内側から把持可能空気圧制御式把持装置を提供すること。
【解決手段】把持装置は、遠位開口部に続く中間空間と加圧された流体源に接続される誘導槽23’の範囲を内側で定める支持スリーブ16から構成される。中間空間にはグリッパー手段21が遠位開口部に面して取り付けられ、かつ把持できる部分と係合するよう設計される。誘導槽には制御ピストン22が加圧された流体によってグリッパー手段を作動または停止するよう対応する第一位置に、および少なくとも一つの弾性反応要素27によって前記グリッパー手段を停止または作動するのに対応する第二位置に可動に格納される。グリッパー手段は外側から、または空洞を有する場合は内側から、把持できる部分を把持するよう装備されることが可能である。
(もっと読む)
ワーク把持装置、および、これを用いたアッセンブリの組立て方法
【課題】複数の部品が積層されて構成されるアッセンブリについて、省スペースで効率的に組み立てできるワーク把持装置を提供すること。
【解決手段】把持装置30は、基部31と、この基部31に設けられて所定方向に延出し先端に第1の駒421を有する円筒状のガイド部42と、このガイド部42の同軸上に設けられた円筒状のコレット43と、ガイド部42およびコレット43に挿通されて、先端に第2の駒441を有する棒状のシャフト部44と、ガイド部42とシャフト部44とを相対移動させることにより、駒421、441同士を接近または離隔させるアクチュエータ41と、基部31に設けられて所定方向に進退可能でありかつ先端がワークに係止可能な係止部50と、を備え、第1の駒421および第2の駒441の外径は、コレット43側では、コレット43の内径よりも小さく、コレット43の反対側では、コレット43の内径よりも大きい。
(もっと読む)
把持装置
【課題】構造が単純で、容器の把持幅の変動を補正でき信頼性の高い把持装置を提供する。
【解決手段】少なくとも1本の軸線を中心に旋回自在に支持されており、一方の端部に把持構造部を有する2つの剛体把持アームGと、把持アームの間で動作する蓄力器20と、軸線を超えた他方の側における、把持アームの延長部分の把持アームクローズレバー3と、クローズレバーの間で回転するクローズカムNとを備え、少なくとも1つのクローズレバー3が、弾性変形両領域Bを介してクローズカムによって作動可能で、弾性変形領域がアームのセクション7であり、このアームが、クローズカムに対して作用し、把持アームとは構造的に個別で、把持アームと一緒に旋回運動するように把持アームに密着し、クローズレバーにおける止め部4とセクションとの間に、このセクションが少なくとも実質的に変形していない状態において所定の変形空間Zが設けられている。
(もっと読む)
ハンドマニプレータ
【課題】レバー部材に対する操作を停止させても掴んだ状態を継続し得ること、操作性を維持して気密性を高めること。
【解決手段】ハンドマニプレータに、トリガー状レバー部材302を引くと進出する作動棒303sと、これを進退自在に外装する、周側に貫通孔303pを開口したガイド管303gと、各貫通孔303pに挿入したクラッチボール303bと、クラッチボール303bを挿入した各貫通孔303pに対面させて配した傾斜面303tを有するクサビ面部材303wと、ガイド管303gに後退作用力を付与するバネ手段303dと、ガイド管303gを一時的に進出させる規制解除手段と、で構成する作用伝達軸307の後退動作規制手段303を付設し、支分伝達軸307dの後端と支分外装管308bの内周との間にダイヤフラム314を、ボール孔308bhの外面側に弾性シート313sを配した。
(もっと読む)
搬送システム
【課題】車種に合わせたロボットのティーチングが不要となる搬送システムを提供すること。
【解決手段】搬送システムは、複数種類のワークW1…Wnを把持する把持ツール30と、把持ツール30の三次元空間内における位置及び姿勢を変更する多関節アーム13と、把持ツール30を多関節アーム13の先端側に対して少なくとも回転させる把持ツール支持機構40とを備える。また、多関節アーム13の先端側を開始位置から終了位置まで移動させるための、複数種類のワークに共通のアーム指令データ、及び、開始位置で複数種類のワークを把持するための、複数種類のワークのそれぞれに応じた把持ツール30の回転位相θ1…θnを含む把持ツール指令データを記憶する記憶部61と、これらアーム指令データ及び把持ツール指令データに基づいて、多関節アーム13、把持ツール30、及び把持ツール支持機構40を制御する制御信号出力部62と、を備える。
(もっと読む)
部品把持装置とその方法
【課題】部品を把持したままで、部品の角度や位置を制御でき、且つ迅速な把持力制御が可能であり、部品搭載装置に適用したときには部品認識から部品搭載までを迅速に行う。
【解決手段】部品102を把持する把持手段150と該把持手段150を制御する制御手段180とを有する部品把持装置において、前記把持手段150が、前記部品102を把持するための3つ以上の把持爪172、174、176と、該把持爪172、174、176を駆動する互いに独立した駆動源154、156、158とを備え、且つ、前記制御手段180が、前記把持手段150を制御するための外乱オブザーバ200と、軸ねじれ反力推定オブザーバ202とを備え、前記制御手段180から前記駆動源154、156、158への制御指令により前記把持手段150が共振比制御される。
(もっと読む)
揺動開閉チャック
【課題】把持用フィンガーに対する摺動抵抗を低減して耐久性を高めることができる。小型のピストンで高い把持力を得ることができ、チャック自体を小型化することができる。把持用フィンガーを多段動作で開閉することにより高い把持力を得ることができる。
【解決手段】作動部材の作動に伴って移動するカム部材の第1傾斜部を摺接するボール部材により作動部を弾性部材の弾性力に抗して互いに離間する方向へ押圧して把持用フィンガーを、把持部によるワークの把持が可能な位置まで揺動した後に、続いて第2傾斜部を摺接するボール部材により作動部を更に互いに離間する方向へ押圧して把持用フィンガーを、把持部がワークを把持する位置へ揺動する。
(もっと読む)
把持装置および方法
【課題】把持装置および方法において、把持開口の大きさを正確に設定することができ、安定した把持動作を行うことができるようにする。
【解決手段】把持装置が、把持ユニットに対して動作制御値を送出して把持ユニットの動作を制御する把持機構制御部117と、把持部材によって形成される把持開口の大きさを算出するための画像処理部112と、複数の動作制御値に対して画像処理部112で算出された把持開口の大きさから、動作制御値に対する把持開口の大きさとの関係を表す校正データを生成する校正データ生成部113と、校正データを記憶するデータ記憶部116と、把持ユニットに対する動作制御値データをデータ記憶部116に記憶された校正データに基づいて生成して、把持機構制御部117に送出する装置制御部115とを備える。
(もっと読む)
産業用ロボットのハンド装置
【課題】電源ダウン時、非常停止時又は制御システムで異常を検出した場合など、ハンド装置の把持装置への電源供給を遮断せざるを得ないとき、把持装置が把持力を維持することができ、ワークを把持している場合にはワークを落下させることがない産業用ロボットのハンド装置を提供。
【解決手段】サーボモータ3を作動させることによりフィンガー7を開閉動作させてワークをクランプし、サーボモータ3を停止させ、次にエアシリンダ14のロッド14’を作動させて偏心軸13をガイド溝16内で回転させ、スライド4をフレーム1に対し偏心軸13の偏心量相当分だけボールねじ2の軸方向にスライドさせてフィンガー7を開閉させてワークを把持するようにした。
(もっと読む)
1 - 20 / 52
[ Back to top ]