
Fターム[3C007EU11]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | 可撓伝動部材 (120)
Fターム[3C007EU11]に分類される特許
61 - 80 / 120
ハンドリング機構及び成膜装置
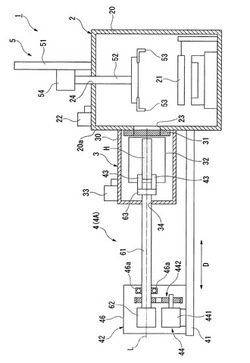
【課題】被成膜物の反転作業の作業効率を向上させ、被成膜物に対して効率的に成膜すること。
【解決手段】減圧状態で被成膜物Hを一定方向側から成膜する成膜機構21が配置された成膜室2と、被成膜物を収容するために成膜室に隣接して連通可能に設けられた収容室3と、を備える成膜装置1に用いられる機構であって、被成膜物を把持及び把持解除する把持ハンド43と、該把持ハンドを、収容室から成膜室までの範囲で移動可能且つ把持姿勢を反転可能に支持するハンド支持部61と、収容室及び成膜室の外部に配置され、ハンド支持部を介して、収容室から成膜室までの範囲で把持ハンドを移動させるハンド移動部41と、収容室及び成膜室の外部に配置され、把持ハンドの把持姿勢を反転させる反転部44と、を備えるハンドリング機構4を提供する。
(もっと読む)
ロボットハンドおよび指機構

【課題】物体を変形あるいは毀損することなく把持するのに適したロボットハンドを提案すること。
【解決手段】ロボットハンド1は、リニアアクチュエータ5の作動ロッド5aの前後方向への伸縮動作を、リンク機構を介して左右の第1リンク11の開閉動作に変換している。リンク機構にはコイルバネからなる左右の中間リンク13が含まれている。左右の第1リンク11が把持対象の物体Wに当たると中間リンク13が弾性変形して伸び、物体Wを把持する力が中間リンク13の弾性変形によって徐々に増加する。物体Wに急激に大きな把持力が作用して、物体Wが変形する、毀損するなどの弊害を防止できる。
(もっと読む)
回動装置
【課題】流体圧式のアクチュエータを用いた回動装置において、回動角度の増大を図る。
【解決手段】回動部材13を回動可能に連結した配置部材12は、上面12bに突出部20を設け、その突出部20の突出面20aに流体圧式のアクチュエータ14を配置し、線材15でアクチュエータ14と回動部材13を繋ぐ。突出部20は、回動部材13側の先端縁20eから長手方向の途中部分へと高くなるようにすると共に、その途中部分から後端縁20fへと低くなるようにしている。それにより、アクチュエータ14に流体を供給してアクチュエータ14の全長を短くさせると、アクチュエータ14の先端14aが突出部20の突出面20aに沿って移動し、配置部材12の上面12bから離れて高く位置する。その結果、傾いた姿勢の線材15を介してアクチュエータにより回動部材13は引っ張られるので、回動部材13の回動角度が大きくなる。
(もっと読む)
産業用ロボットのハンド装置
【課題】各指毎に各1個のモータを必要とせず、さらに、システムが異常を検出した非常停止時など、ハンド装置への電源を遮断せざるを得ないときも、ハンド装置は把持力を維持することができ、把持しているワークを落下させることがないられない産業用ロボットのハンド装置を提供。
【解決手段】ボールねじ 2の軸方向にフレーム内周にスライド可能に案内されたブロック 4と、ナット16の小径切り込み部15下面とブロックの小径部17下面との間に配置されたスプリング 9(弾性体でもよい)と、スプリング 9の変形を検出するセンサ12と、を有し、サーボモータ 3を作動させることにより各フィンガー 5の他端が開閉動作するようにし、各フィンガー 5の他端がワーク10に当たった後、さらにスプリング 9を変形してセンサ12が作動するまでサーボモータ 3を作動させた後、サーボモータ 3のブレーキ13を作動させた状態でワーク10を把持させるようにした。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
駆動機構及び該駆動機構を備えるグリッパ機構
【課題】回転駆動源から押圧部材への駆動力の伝達が停止された場合等であっても、ワークへの押圧部材の押圧状態を維持して電気エネルギの消費を低減することが可能な駆動機構及び該駆動機構を備えるグリッパ機構を提供する。
【解決手段】電動グリッパ10は、モータ16と、軸線方向に変位可能な送りナット30にモータ16からの回転駆動力を伝達する送りねじ部22と、送りナット30にリンク機構18を介して連結され、送りナット30と連動して変位することでワークWを把持するグリッパ部14とを備える駆動機構12を有する。駆動機構12において、送りねじ部22は、送りナット30が前進されてグリッパ部14によりワークWを把持した場合に、該ワークWからグリッパ部14が受ける反力によっては送りナット30が後退しないセルフロック機構を構成すると共に、該セルフロック機構は、モータ16からの回転駆動力が送りねじ部22に伝達されることで解除可能とされる。
(もっと読む)
産業用ロボットのハンド装置
【課題】ワーク把持力の大小にかかわらずフィンガーが抜け落ち、ワークが落下することがない、かつハンド装置全体を交換することなくワークの形状に合わせてフィンガーのみをコスト安に交換できる産業用ロボットのハンド装置を提供。
【解決手段】各フィンガー取付ベース43下面内側に対向して形成された(各フィンガー取付ベース43下面外側に内側に向けて形成してもよい)T字状断面をもつT字状水平盲溝46と、上部に各T字状水平盲溝46と嵌まり合うT字状頭部47とT字状頭部47から垂下するフィンガー部48からなる交換可能なフィンガー44と、T字状水平盲溝46にフィンガー44のT字状頭部47が嵌まり合った時の抜け止め部材 45a,45bとを有する。
(もっと読む)
基板アライメント機構を備えた搬送ロボット及びそれを備えた半導体製造装置
【課題】基板アライメント機構を備えた搬送ロボットを提供すること。
【解決手段】最先端のアーム5に設けられ、ハンド6を最先端のアーム5の延在方向に前後移動させるハンド駆動機構と、最先端のアーム5に設けられ、矩形基板Rの側面を把持して矩形基板Rをハンド6に対してアライメントするアライメント機構7と、を備え、ハンド駆動機構によって最先端のアーム5上にスライドさせた矩形基板Rに対してアライメント機構7がアライメントするよう構成した。
(もっと読む)
多指可動ロボットハンド及び多指可動ロボットハンドにおける指関節駆動制御方法
【課題】多指多関節の人工ハンドにおいて、形状記憶性素材を用いて指関節を屈曲駆動する際の把持トルクを増補するとともに、母指を可動取り付けして他の4指との位置関係を調整可能とすること。
【解決手段】多指可動ロボットハンドXは、各指関節を手掌側に屈折可能で伸張復帰可能に回動連結した可動指21;22;23;24 を有し、隣接する可動指21;22(23;24)に屈伸誘導線条部材17;18(19;20)を挿通し、かつ、その指間連絡部を手首方向へ進退駆動可能な移動体10に係止して牽引操作することにより、静止挙動を含む把持又は開放動作に係る運動制御をおこなう指関節駆動機構を有する。ここで、屈伸誘導線条部材17;18(19;20)として固定長の形状記憶性素材(形状記憶メタル)を用い、その通電制御手段30を設けている。そして、把持動作時に形状記憶メタルを長手方向に収縮駆動又は形状回復駆動する。
(もっと読む)
把持フィンガあたり2本の駆動軸を備えた把持機構
本発明は、2本の駆動軸(5b、6)、クランク、歯車、鎖、ベルトまたは歯付ベルト軸によって動作機構(1、10a、10b、11b)に連結することによって動作させられる少なくとも1本の可動把持フィンガ(11b)を備えた、機械、ロボットおよび操作装置のための把持機構に関する。2つの被駆動レバー(10a、10b)によって把持フィンガ(11b)を動作させ、次に各々駆動軸によって駆動される結果として、経路またはその範囲を通して180°をこえる回転を通して把持フィンガ(11b)を動かして、したがって、ひっくり返るかまたは不安定な位置に入ることなく力およびトルクをしっかりと伝達することが可能である。本発明によれば、駆動軸(5b、6)は囲まれかつ一体的な把持ハウジング(1)内に完全に収容され、ほこりおよび汚れから保護され、かつ密閉して密封されるために、軸方向に少なくとも2つの部分に分けられる。駆動軸の異なる部分が、お互いに心出しされて、好ましくは穿孔およびピン(8)を備えたピニオン歯車の形で、軸方向歯部を用いて確実に接続される。駆動軸は、好ましくはキャリア支持軸受を有する。 (もっと読む)
産業用ロボット
【課題】把持対象ワークの異種形状や寸法違いや高さがばらつく場合を含む多数のワークをすくいあげるように把持することができ、かつフィンガーの先端が水平方向に同じ軸方向高さの位置でワークを掴むことができるハンド装置を有する産業用ロボットを提供すること。
【解決手段】少なくとも2個のフィンガーを有しかつ少なくとも2個のフィンガーが開閉する際、すくいあげるように求心動作を行い、かつエンコーダーの検出角度θに対応して、ロボットを作動させてアーム21先端に支持されたハンド装置30を補正量だけ垂直方向Y軸方向に移動させて各フィンガーの先端が同じY軸方向高さでワークを掴むようにした。
(もっと読む)
マニピュレータおよびロボット
【課題】機構や制御アルゴリズムを単純にしつつも、様々な形状の物体を確実に把持することができるマニピュレータを提供する。
【解決手段】複数の関節軸111,112,113及び複数のリンク131,132,133を有し、複数の関節軸111,112,113の回転角が一定の関係を保つように複数のリンク131,132,133が連動して閉じる方向に動く指1と、指1と対向して配置され、複数の関節軸211,212,213及び複数のリンク211,212,213を有し、複数のリンク231,232,233のうち根元側のリンク231から順に閉じる方向に動き、且つ根元側のリンク231が物体に接触すると、根元側のリンク231に隣り合うリンク232が閉じる方向に動く指2と、指1及び指2を駆動する駆動源100,200を備える。
(もっと読む)
産業用ロボット
【課題】機械的な構成で搬送対象物を把持しても、搬送対象物に与える衝撃を抑制することが可能な産業用ロボットを提供すること。
【解決手段】ロボット1は、ウエハ2を搭載するハンド3と、ハンド3を保持する第2アーム6を有する多関節アーム部4とを備えている。ハンド3は、ウエハ2を把持するための把持部28と、ウエハ2を把持する方向へ把持部28を付勢する付勢部材とを備え、第2アーム6は、ハンド3の回動中心から偏心した位置に固定され、ウエハ2の搬出開始前に把持部28に当接して把持部28をウエハ2から退避させる偏心部材31を備えている。偏心部材31は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作に伴って、把持部28がウエハ2を把持する方向へ移動するように、把持部28に対して相対移動し、把持部28は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作の減速時に、ウエハ2の把持を開始する。
(もっと読む)
多関節指部材並びにロボットハンド及びその制御方法
【課題】共通の駆動源によって駆動される複数の関節を有する指部材にて、これら複数の関節の関節角度が任意の角度に設定された状態を作り出すことを可能とする。
【解決手段】多関節指部材2は、駆動モータ200と、駆動モータ200によって駆動される第1関節20と、第1関節20に一端が固定された第1リンク21と、第2リンク23と、第2リンク23を回動可能に第1リンク21の他端に結合し、第1関節20と共通の駆動モータ200によって駆動される第2関節22と、クラッチ機構212とを備える。ここで、クラッチ機構212は、第1関節20の駆動に要する駆動トルクの増大に応じて駆動モータ200から第1関節20への動力伝達を抑制するとともに、第1関節20への動力伝達が抑制された状態において第1関節20の駆動に要する駆動トルクが減少したことに応じて、即座に駆動モータ200から第1関節20への動力伝達を回復させる。
(もっと読む)
ロボットハンド
【課題】物体を把持した状態で指リンクの位置を固定するだけではなく、物体に及ぼす把持力を能動的に高めることが可能な指リンクの位置固定機構を有するロボットハンドを提供する。
【解決手段】ロボットハンド1は、指先リンク23と、モータ200と、モータ200により回転駆動される入力プーリ202と、指先リンク23に固定された出力プーリ204と、入力プーリ202と出力プーリ204との間に張られ、入力プーリ202の回転を出力プーリ204に伝達する少なくとも1つの帯状の伝達部材(ワイヤ203)と、ワイヤ203を押し付けて固定することで、出力プーリ204の回転を停止維持するとともに、押し付けられたワイヤ203の引張り力によって、指先リンク23から把持された物体に作用する把持力を高める方向に出力プーリ204を付勢するようにしたクランプ部205とを備える。
(もっと読む)
アクチュエータ、駆動装置およびハンド装置
【課題】シートの劣化を抑制すると共に、流体の供給に対してダイレクトに作動するメンブレン方式のアクチュエータを実現する。
【解決手段】アクチュエータ10は、供給孔12eを開口したベース部材12にシート13を配置し、シート13を介在して第1部材14および第2部材15で構成されるカバー部材10aをベース部材12へ取り付ける。カバー部材10aは、ベース部材12の供給孔12eに対応する箇所に空洞部11と、この空洞部11から外方へ貫通する貫通孔18を有する。アクチュエータ10は、空洞部11にピストン17を摺動可能に収め、空洞部11を横切り貫通孔18を通過して他端側が外方へ抜け出るように線材16を配置し、ピストン17で線材16を押し上げる。
(もっと読む)
ロボットハンドおよびロボット
【課題】対象物を把持するロボットハンドによって溝状のインタフェースを操作する。
【解決手段】対象物を把持するロボットハンドに、掌部10と、掌部10から突出し、対象物を把持可能な一対のグリッパ51,52と、それらグリッパ51,52の間隔が変化するようにグリッパ51,52を移動させる開閉手段と、第1のグリッパ51の先端の第1の指先部55を押し込む直線運動によって第2のグリッパ52の先端の第2の指先部56を第1のグリッパ51に向けて回動するように駆動するリンク手段とを備える。リンク手段は、第1の指先部55に結合されたラック、そのラックにかみ合わされたピニオン、そのピニオンの回転を伝達するベルトなどを備える。
(もっと読む)
多指多関節ロボットハンドおよびロボット
【課題】
省配線化することができるロボットを提供する。
【解決手段】
第1の指および第2の指を備え、前記第1の指および第2の指が複数の関節で構成される多指多関節ロボットハンドにおいて、前記第1の指または第2の指は、前記関節を回転させるための回転駆動手段を内蔵した第1の関節部と、所定の力以上の外力が加えられると当該外力に倣って回転する回転手段を備える第2の関節部と、を備える。
(もっと読む)
把持装置およびその制御方法
【課題】把持したワークの姿勢および幅方向の把持位置を迅速に補正して次工程へ受け渡すことのできる把持装置およびその制御方法の提供。
【解決手段】対向する一対の把持爪と、把持爪と直交して設けられた対向する一対の補正部材と、これらに駆動系の動力を伝達する伝達部材を備えた把持装置であって、把持爪が把持したワークに、補正部材を進出動して当接させることでワークの姿勢を補正する姿勢補正機能を有することを特徴とし、好ましくは、ワークの姿勢が補正された状態からさらに補正部材を進出動させることでワークの幅方向の把持位置を補正する把持位置補正機能を有することを特徴とする把持装置およびその制御方法。
(もっと読む)
ロボットハンド
【課題】寸法範囲の広い把持対象物体を、安定して容易に把持することができるロボットハンドを提供すること。
【解決手段】本発明に係るロボットハンドは、回転軸を中心に回転可動な1又は2以上の指関節を有する複数の指部3と、複数の指部3を支持する掌部1とを有し、複数の指部2は、各指関節11の回転軸が平行に配置され、掌部1は、少なくとも2つの板状形状の掌板部1a、1bを備え、掌板部1a、1bはその一方の端部にて指関節11の回転軸と平行配置された回転軸を有する掌関節2を介して回転可動に連結され、その他方の端部にて指関節11を介して複数の指部3に連結されるものである。
(もっと読む)
61 - 80 / 120
[ Back to top ]