
Fターム[3C007EV13]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形する当接部 (142) | バネの利用 (27)
Fターム[3C007EV13]に分類される特許
1 - 20 / 27
把持装置
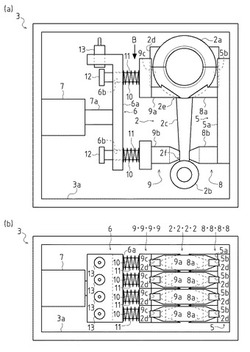
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット

【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
把持装置
【課題】当接部の挟圧方向に対する厚みをより大きくして、従来に比して把持力を高めた把持装置を提供する。
【解決手段】複数の爪部4・5と、弾性素材からなる袋状部材6aと、該袋状部材6aに充填される粒状物6bとを備え、各爪部4・5のワーク50と当接する部位に付設される複数の当接部6・6・・・と、を有し、各爪部4・5を変位させることにより、各当接部6・6・・・によりワーク50を挟圧し、ワーク50を挟圧した状態で、袋状部材6aの内容積に対する粒状物6bの体積比率を増大させることにより、粒状物6bを、任意の形状を保持しつつ硬化させて、ワーク50の把持を行う把持部2を備える把持装置1であって、把持部2は、当接部6を構成する袋状部材6aのワーク50と当接する部位である正面部6cに連続し、かつ、該正面部6cに略直交して形成される部位である側面部6dの位置を規制するための規制部材9(保持枠9a)を備える。
(もっと読む)
把持装置と把持装置付きロボット
【課題】ワークを安定良く把持できる把持装置を提供する。
【解決手段】ワークWを把持する把持装置1であって、水平方向の間隔が調整可能な複数のベース部材2と、リンク機構5によって各ベース部材2に対して上下に動作可能に取付けられる把持部材4と、リンク機構5の動きを規制し得るストッパ部材7とを有する。リンク機構5は、ベース部材2、把持部材4、並設される一対のリンク5a,5b、各リンク5a,5bがベース部材2に回転可能に連結される第一端部5a1,5b1、および各リンク5a,5bが把持部材4に回転可能に連結される第二端部5a2,5b2を有して形成される。ストッパ部材7は、各リンク5a,5bの各第二端部5a2,5b2が各第一端部5a1,5b1と同じ高さまたは各第一端部5a1,5b1より上の位置において、把持部材4が下へ移動することを規制し得る第一ストッパ7aを有する。
(もっと読む)
マニピュレータ
【課題】相対的に小さい把持力量で対象物を把持できる状態と、より大きく、かつ調整可能な把持力量を発生させることができる状態とを使い分けることができるマニピュレータを提供する。
【解決手段】回動軸13で連結され、先端側に開閉する把持部14を有する第1鉗子片11及び第2鉗子片12を備えたマニピュレータ1は、一対の鉗子片の基端側に接続され、軸線方向に進退させることにより一対の鉗子片を開閉させる操作部材20と、第1のバネ定数を有し、弾性変形することにより把持部14に発生する把持力量を第1のバネ定数と操作部材20の牽引量とに基づいて変化させる第1緩衝部15B、16Bと、第1緩衝部15B、16Bの弾性変形を規制するストッパ17A、18Aとを備えることを特徴とする。
(もっと読む)
グリッパ
【課題】 本願発明の目的は、小型化を図ることが可能なグリッパを提供することにある。
【解決手段】 本願発明によるグリッパは、駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する変換部材と、を具備し、上記変換部材は変位拡大機能をもつ変位拡大部材から構成されているものであり、それによって、大きな変位を出すのに適さない駆動源、例えば、ソレノイド等の使用が可能となり、グリッパの小型化を図ることができる。
(もっと読む)
搬送ハンド及び搬送ロボット
【課題】画像認識によるZ軸方向の位置情報に誤差がある場合であっても、搬送ハンド及び物品の損傷を防止するだけでなく、確実に物品を挟持することができ、搬送中に物品の姿勢を崩すことなく安全に搬送できる搬送ハンドを提供する。
【解決手段】画像認識によって得られた物品の3次元位置情報に基づいてその物品Wを搬送する搬送ロボット400に用いられ、ハンド本体4に設けられた複数の挟持体5の間隔を拡縮することによって物品Wを挟持又は解放する搬送ハンド3であって、挟持体5が収容部51と可動部52とからなり伸縮可能に構成され、物品Wを挟持した状態において、可動部52が、がたつきにより収容部51に対して傾いて収容部51の挟持方向の内面51aと接触する。一方、物品Wを開放した状態において、可動部52が、付勢部材53の弾性力により、収容部51の挟持方向の内面51aから離間する。
(もっと読む)
ワーク把持装置およびワーク移送装置
【課題】直列に整列した複数の柱状のワークを確実に一括把持することが可能なワーク把持装置を提供する。
【解決手段】このワーク把持装置1は、一対のチャック10と、これらのチャック10の対向部位に互いに対面するように設けられる一対の板ばね部材20とを備えている。板ばね部材20は、チャック10に取付けられる取付け部21と、この取付け部21からそれぞれ延びて、ワーク101に接触することで互いに独立して側方へ撓み変形する複数のばね片22とを有する櫛歯状に形成されている。チャック10は、各ばね片22の先端部22aに接触して当該先端部22aの側方への変位を規制する突出部12と、各ばね片22の基部22bの側方への変位を許容する凹部11とを有している。複数のばね片22は、ワーク101の長さ方向に、各ワーク101にそれぞれ少なくとも1つのばね片22が接触するようなピッチdで設けられている。
(もっと読む)
搬送装置
【課題】ウエハ等の脆弱性を帯びた板状部材を搬送対象とした場合の当該板状部材にストレスを与え難くするとともに、ウエハの割れ原因を効果的に回避可能な搬送装置を提供すること。
【解決手段】半導体ウエハWの下面側に位置してこれを支持する支持手段11と、この支持手段11を移動可能に支持する移動手段12とを備えて搬送装置10が構成されている。支持手段11は、第1アーム形成部材24と第2アーム形成部材25とにより一部開放可能な閉ループを形成可能な支持アーム20と、この支持アーム20に設けられた吸引手段21とを含む。第2アーム形成部材25の先端25B側は、接離可能に設けられている。
(もっと読む)
把持装置
【課題】膨張体により対象物を把持する場合に、対象物が、従来においては把持に困難な姿勢や位置をとっていても、対象物を把持できるようにする。
【解決手段】開口1aを持つ対象物を把持する把持装置である。開口1aから対象物1の内部空間1bに挿入され、膨張可能な膨張体3を備える。膨張体3は、内部空間1b内で膨張することで対象物1の内面に接触圧を作用させ、該接触圧により対象物1を把持する。膨張体3には挿入案内部5が取り付けられ、該挿入案内部5は、開口1aへの膨張体3の挿入を案内するように膨張体3から突出している。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、複数のアームを有する伸縮自在なリンク機構20と、その動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され、基板10を載置するための載置部5とを備え、載置部5には、基板10の側部と当接して係止する係止部5a、5bが設けられる。第3の左アーム3L、第3の右アーム3Rの先端部には、第3の左アーム3L、第3の右アーム3Rに設けられた凸状の駆動支持部31L、31Rと、凸状の駆動支持部31L、31Rによって駆動される従動機構部6とを備える付勢手段9が設けられる。従動機構部6は、凸状の駆動支持部31L、31Rと係合摺動可能な長孔62を有する従動部61と、従動部61の長孔62内における凸状の駆動支持部31L、31Rの移動に応じて載置部5の係止部5a、5bに向って案内移動される付勢部6aとを有する。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において隣接する第3の左アーム3L、第3の右アーム3Rによって連結され基板10を載置するための載置部5とを備える。載置部5には、基板10の側部と当接して係止するための係止部5a、5bが設けられる。リンク機構20の隣接する第3の左アーム3L、第3の右アーム3Rには、基板10の側部と当接し基板10を載置部5の係止部5a、5bに対して付勢する付勢部6aを有する弾性の付勢部材6が固定される。付勢部材6は、第3の左アーム3L、第3の右アーム3Rの相対的な角度関係に応じて載置部5の係止部5a、5bに対する付勢部6aの距離が変化するように構成されている。
(もっと読む)
揺動機構を有するハンド及びそれを備えた基板搬送装置
【課題】ハンドに保持された基板の平面の法線方向において、これを直接的に相手側の基板保持機構と授受できるようにする基板搬送装置用のハンドを提供すること。
【解決手段】ハンド1を、基部となるハンドベース4と、ハンドベース4に重なるように配置され、基板2を支持する揺動ハンド3と、ハンドベース4と揺動ハンド3との間にあって、揺動ハンド3をハンドベース4に対して傾斜及び平行移動可能に支持する揺動機構5と、から構成した。
(もっと読む)
把持装置および方法
【課題】把持装置および方法において、把持開口の大きさを正確に設定することができ、安定した把持動作を行うことができるようにする。
【解決手段】把持装置が、把持ユニットに対して動作制御値を送出して把持ユニットの動作を制御する把持機構制御部117と、把持部材によって形成される把持開口の大きさを算出するための画像処理部112と、複数の動作制御値に対して画像処理部112で算出された把持開口の大きさから、動作制御値に対する把持開口の大きさとの関係を表す校正データを生成する校正データ生成部113と、校正データを記憶するデータ記憶部116と、把持ユニットに対する動作制御値データをデータ記憶部116に記憶された校正データに基づいて生成して、把持機構制御部117に送出する装置制御部115とを備える。
(もっと読む)
フォーク状ハンド先端に装着した緩衝用のバンパー
【課題】 フォークが大きな平面状の搬送物を搬送する際、他の積み重ねた搬送物を破損させることが無く、しかも簡単な板金構造でバネの要素のあるフォーク先端に装着するバンパーを提供すること。
【解決手段】 搬送ロボット等のアームに取り付けられた搬送物を載せるフォーク状ハンド先端に装着した緩衝用のバンパーにおいて、フォーク状ハンドの搬送物に対する進行方向に少なくとも1以上の折り曲げ部の有る板状の構造物であることを特徴とするフォーク状ハンド先端に装着した緩衝用のバンパーとした。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
2指把持型ロボットハンド
【課題】2本の指を備え、指を駆動するアクチュエータへの指令値が零となっても、把持対象物を落とさない機構を有する2指把持型ロボットハンドを提供する。
【解決手段】第3リンク1に第2板ばね2が接続され、第2板ばね2に第2リンク3が接続され、第2リンク3に第1板ばね4が接続され、第1板ばね4に第1リンク5が接続されている指11であり、指11は外装6で覆われており、第1リンク5がアクチュエータ9の回転軸8の回転で直線運動することにより、把持対象物が外装6により把持され、外装6が把持対象物に接触する際に第1板ばね4と第2板ばね2が把持対象物に沿って変形することにより把持対象物を安定して把持でき、第1リンク5に接続される引張ばね7の張力によりアクチュエータ9への指令値が零となっても把持対象物を安定に落とさずに把持できる2指把持型ロボットハンド13である。
(もっと読む)
把持型ロボットハンド
【課題】2本の指を備え、指を駆動するアクチュエータへの指令値が零となっても、把持対象物を落とさない機構を有する把持型ロボットハンドを提供する。
【解決手段】第3リンク1に第2板ばね2が接続され、第2板ばね2に第2リンク3が接続され、第2リンク3に第1板ばね4が接続され、第1板ばね4に第1リンク5が接続されている指12であり、指12は外装6で覆われており、第1リンク5がアクチュエータ10の回転軸9の回転で直線運動することにより、把持対象物が外装6により把持され、外装6が把持対象物に接触する際に第1板ばね4と第2板ばね2が把持対象物に沿って変形することにより把持対象物を安定して把持でき、第1リンク5に接続される引張ばね7の張力とダンパー8の減衰力によりアクチュエータ10への指令値が零となっても把持対象物を安定に落とさずに把持できる把持型ロボットハンド14である。
(もっと読む)
ネック部付き容器の個別支持装置およびかかる支持装置を使用した移送装置を備えた設備
【課題】本発明は、ネック部付き容器のための個別支持装置を提供する。
【解決手段】本発明は、ネック部により支持され、容器のネック部の内側に係合されうる支持部材を備え、支持部材が半径方向に弾性的に引き込み可能であり、ネック部の内壁に対して摩擦と共に支えうる支持要素を備え、支持部材が中央コアとコアを一定の半径距離で取り囲み、円形の外形の少なくとも1列の穴によって穴が開けるスカートをなす外壁との間で画定される周囲流路を備える略軸対称の円筒形ベース部と、穴と同数でそれぞれの穴と対向してチャンネルの中に少なくとも1つの列に配置された支持要素を形成し、直径が穴の直径よりも十分に大きい複数のボールと、ボールがそれぞれの穴の中に弾性によって押し返され、部分的に穴の外側に突出するようにコアとボールとの間に挿入された弾性戻し手段と、を備えることを特徴とするネック部付き容器のための個別支持装置に関する。
(もっと読む)
移載方法及びその装置
【課題】移載本体と、支持板材の対向する移載ユニット側となる作用面側から先端部を折り返して非作用面側を経て後端部で折り返して巻回配置された被移載物を移載可能な移載ベルトと、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構と、支持板材を進退移動させる進退機構とを備えてなるから、簡素な構造とすることができる。
【解決手段】各移載ユニットTは、それぞれ、移載本体1と、支持板材3の対向する移載ユニット側となる作用面3b側から先端部3aを折り返して非作用面3d側を経て後端部3cで折り返して巻回配置された被移載物Wを移載可能な移載ベルト4と、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構5と、支持板材を進退移動させる進退機構6とを備えてなる。
(もっと読む)
1 - 20 / 27
[ Back to top ]