
Fターム[3C007EV20]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 当接部のフローティングロック (47)
Fターム[3C007EV20]に分類される特許
1 - 20 / 47
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
把持機

【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
把持装置
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
把持装置と把持装置付きロボット
【課題】ワークを安定良く把持できる把持装置を提供する。
【解決手段】ワークWを把持する把持装置1であって、水平方向の間隔が調整可能な複数のベース部材2と、リンク機構5によって各ベース部材2に対して上下に動作可能に取付けられる把持部材4と、リンク機構5の動きを規制し得るストッパ部材7とを有する。リンク機構5は、ベース部材2、把持部材4、並設される一対のリンク5a,5b、各リンク5a,5bがベース部材2に回転可能に連結される第一端部5a1,5b1、および各リンク5a,5bが把持部材4に回転可能に連結される第二端部5a2,5b2を有して形成される。ストッパ部材7は、各リンク5a,5bの各第二端部5a2,5b2が各第一端部5a1,5b1と同じ高さまたは各第一端部5a1,5b1より上の位置において、把持部材4が下へ移動することを規制し得る第一ストッパ7aを有する。
(もっと読む)
移載ハンドおよび移載方法
【課題】ワークのクリップ等への嵌め込みや挿入において、位置決め誤差、ワーク誤差を吸収し、クリップ力に負けず確実に嵌め込むことができる移載ハンドを提供する。
【解決手段】ワークをターゲットに嵌め込む移載ハンド100において、前記ワークを保持する保持部1と前記保持部を移動可能な状態で支持するガイド部3と前記保持部を移動可能方向に加圧する加圧バネ3bと前記ガイド部を回転可能な状態で支持する回転支持部4を備えていることを特徴とする。
(もっと読む)
ハンドリング装置およびハンドリング方法
【課題】
2つのワークを同時に挟持可能である軽量なハンドリング装置およびハンドリング方法を提供する。
【解決手段】
第1ワークと第2ワークとを挟持するハンドリング装置であって、連動された第1可動爪と第2可動爪と、対向配置された固定爪と、第1可動爪または固定爪に挟持面間隔調整機構と、を備え、第1可動爪と固定爪との間隔、および第2可動爪と固定爪との間隔とが、所定の条件を具備し、第1可動爪と固定爪とで第1ワークを挟持し、第2可動爪と固定爪とで第2ワークを挟持する。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
把持装置および把持装置を備えた布地処理ロボット
【課題】簡易な構成で、多種の対象物に対して複数の機能を有した把持装置および把持装置を備えた布地処理ロボットを提供することである。
【解決手段】把持装置200は、固定把持部材240、可動把持部材261、スライド装置220、把持本体部210およびモータ270からなる。把持装置200においては、把持本体部210に固定された固定把持部材240に対して、スライド装置220により可動把持部材261を直線的に移動させ、かつモータ270により可動把持部材261を回動することにより固定把持部材240の先端部および可動把持部材261の先端可動部材262を近接させ、対象物である布地(洗濯物)を把持するものである。
(もっと読む)
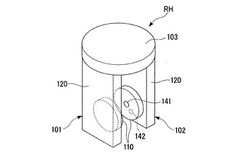
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
搬送ハンド及び搬送ロボット
【課題】画像認識によるZ軸方向の位置情報に誤差がある場合であっても、搬送ハンド及び物品の損傷を防止するだけでなく、確実に物品を挟持することができ、搬送中に物品の姿勢を崩すことなく安全に搬送できる搬送ハンドを提供する。
【解決手段】画像認識によって得られた物品の3次元位置情報に基づいてその物品Wを搬送する搬送ロボット400に用いられ、ハンド本体4に設けられた複数の挟持体5の間隔を拡縮することによって物品Wを挟持又は解放する搬送ハンド3であって、挟持体5が収容部51と可動部52とからなり伸縮可能に構成され、物品Wを挟持した状態において、可動部52が、がたつきにより収容部51に対して傾いて収容部51の挟持方向の内面51aと接触する。一方、物品Wを開放した状態において、可動部52が、付勢部材53の弾性力により、収容部51の挟持方向の内面51aから離間する。
(もっと読む)
リンク式クランプ
【課題】ワークの種類によって当該ワークの被固定部の把持幅の中心線の位置が変化する場合でもリンク式クランプを利用できるようにする。
【解決手段】ハウジング2内にピストン10を挿入し、そのピストン10と上記ハウジング2との間に支持部材14を挿入する。その支持部材14を押上げ機構Pによって所定の力で上方へ押す。上記の支持部材14に取り付けたリンク機構30に、ワークWの被固定部31を両側から把持するための一対の把持リンク32を設ける。上記ピストン10の筒孔10aに所定の遊動隙間36をあけて出力ロッド37を挿入する。その出力ロッド37の出力部48を上記の把持リンク32の入力部32aに連結し、上記の出力ロッド37の入力部38を上記ピストン10の出力部41に揺動可能に連結する。
(もっと読む)
搬送装置
【課題】ウエハ等の脆弱性を帯びた板状部材を搬送対象とした場合の当該板状部材にストレスを与え難くするとともに、ウエハの割れ原因を効果的に回避可能な搬送装置を提供すること。
【解決手段】半導体ウエハWの下面側に位置してこれを支持する支持手段11と、この支持手段11を移動可能に支持する移動手段12とを備えて搬送装置10が構成されている。支持手段11は、第1アーム形成部材24と第2アーム形成部材25とにより一部開放可能な閉ループを形成可能な支持アーム20と、この支持アーム20に設けられた吸引手段21とを含む。第2アーム形成部材25の先端25B側は、接離可能に設けられている。
(もっと読む)
把持装置
【課題】膨張体により対象物を把持する場合に、対象物が、従来においては把持に困難な姿勢や位置をとっていても、対象物を把持できるようにする。
【解決手段】開口1aを持つ対象物を把持する把持装置である。開口1aから対象物1の内部空間1bに挿入され、膨張可能な膨張体3を備える。膨張体3は、内部空間1b内で膨張することで対象物1の内面に接触圧を作用させ、該接触圧により対象物1を把持する。膨張体3には挿入案内部5が取り付けられ、該挿入案内部5は、開口1aへの膨張体3の挿入を案内するように膨張体3から突出している。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
ロボットハンド
【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
電子部品取り付け用グリッパー装置
【課題】本発明は、構造が簡単で、高精度位置移動が必要なところで、容易く高精度位置移動を具現することができる電子部品取り付け用グリッパー装置に関する。
【解決手段】本発明による電子部品取り付け用グリッパー装置は、微細部品の中心に向かって水平移動する支持部と、前記支持部と共に移動し、微細部品を把持するフィンガーを備えるグリッパーと、前記フィンガーが前記微細部品の中心に向かって距離が狭くなるように張力を提供する弾性手段と、前記グリッパーが水平方向に移動するようにガイドするガイド手段と、垂直往復移動して前記支持部を水平方向に往復移動させることで、前記グリッパーを開閉させるカム部と、を含む。
(もっと読む)
チャック機構
【課題】例えば互いにハの字を形成するように傾斜した状態を含む一対の把持部材の回動動作が用いられてワークの把持が行われる構成において、把持部材を動作させるための駆動力が小さい力であっても十分な把持力を得ることができるチャック機構を提供すること。
【解決手段】軸支部13によって回動可能に支持されるとともに対象部品であるクランクキャップ50の把持に際してクランクキャップ50に接触する部分である把持部14を有する一対のアーム12(把持部材)を備え、これら一対のアーム12の回動動作を、クランクキャップ50を把持するための動作である把持動作として用いるチャック機構であって、軸支部13におけるアーム12の回動中心の位置が、把持部14がクランクキャップに接触した状態での把持動作にともなうアーム12とクランクキャップ50との間の作用により移動するように構成されている。
(もっと読む)
1 - 20 / 47
[ Back to top ]