
Fターム[3C007LV01]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | 協調制御 (273)
Fターム[3C007LV01]の下位に属するFターム
マニピュレータ同士の協調 (187)
Fターム[3C007LV01]に分類される特許
1 - 20 / 86
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
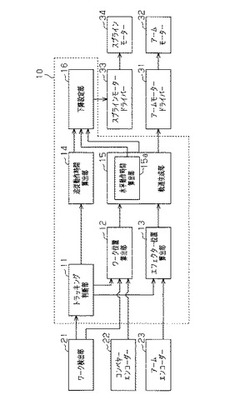
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法

【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボットおよび補間方法
【課題】ロボットを構成する2つの制御ユニットA,Bにおいて、制御ユニットBが制御ユニットA上に設置されている場合に、両方の制御ユニットを同時に動かしながら、制御ユニットBの制御点に対して所望の補間動作ができるようにする。
【解決手段】制御ユニットBのユニットコントローラBに対して、制御ユニットAの制御点ACに対する指令Aも与える。ユニットコントローラBは、指令Aを制御周期ごとに補間計算し、制御ユニットBのユニット座標系Bにおける制御点BCの補間位置を計算することで、制御ユニットBのアクチュエータの補間位置を計算し、アクチュエータを制御するという手順で処理する。
(もっと読む)
人間協調ロボットシステム
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
ポジショナを備えたロボットシステム
【課題】本発明では、ロボットとポジショナを用いてフットプリントを小さくするロボットシステムを提供する。
【解決手段】作業対象物10と、前記作業対象物10に対して作業するロボット5、6と、前記作業対象物10を位置決めするポジショナ7、8とを備え、前記ポジショナ7、8の枠体24上に前記ロボット5、6を備えたものである。
(もっと読む)
音声合成装置、ロボット装置、音声合成方法、及び、プログラム
【課題】ロボット装置の実際の動作と同期した音声を合成することが可能な音声合成装置を提供すること。
【解決手段】音声合成装置100は、予め定められた動作を行うロボット装置に適用され、且つ、処理対象となる文字列である処理対象文字列に基づいて当該処理対象文字列を表す音声である処理対象音声を合成する音声合成処理を行うように構成される。音声合成装置100は、上記処理対象文字列の少なくとも一部である動作付随文字列と対応付けられた動作を上記ロボット装置が実行するために要する時間である動作実行時間を取得する動作実行時間取得部101と、上記取得された動作実行時間に亘って発せられる音声であって、上記動作付随文字列を表す音声である、動作付随音声を含む上記処理対象音声を合成する上記音声合成処理を行う音声合成処理実行部102と、を備える。
(もっと読む)
ロボット同期化装置及びその方法
【課題】ロボット同期化装置及びその方法を提供する。
【解決手段】本発明の一実施形態によるロボット同期化装置は、仮想ロボットを操作する命令を入力され、入力された操作命令に基づいて、実機ロボットの物理的なモデル及び動作が定義されたデータを基に仮想ロボットの動作をモデリングし、モデリングされた仮想ロボットを出力する。
(もっと読む)
アーク溶接システム、シングルアーク溶接システムおよびタンデムアーク溶接システム
【課題】本発明は、デジタル信号を用いて正確なアーク倣いを可能とするアーク溶接システム1を提供する。
【解決手段】アーク溶接システム1は、溶接ワイヤ13に溶接電力を供給する溶接電源30と、溶接トーチ12がアーム先端に装着された溶接ロボット10と、溶接電源30および溶接ロボット10を制御するコントローラ40とを備え、溶接電源30とコントローラ40とがデジタル信号を用いた通信を行うと共に、溶接電源30が、溶接電源同期信号が入力されたときの溶接電源フィードバック信号をコントローラ40に出力する。
(もっと読む)
吊下げ型協調作業ロボット
【課題】人と共存、協調する作業場所に作業ロボットを投入する場合に、作業場所の近傍の床上の障害物があっても作業ロボットを配置することができ、その作業ロボットを配置した際に作業者の安全を確保することができ、しかも高精度の位置決めも作業命令の大規模な改変も必要としない作業ロボットを提供することにある。
【解決手段】撮像手段と、可動部を逆入力可能に駆動する関節を持つ少なくとも1本の作業腕と、前記作業腕を支持する胴部と、作業場所の天井又は壁に基部を着脱可能に固定されて吊り下げられるとともに先端部で前記胴部と前記撮像手段とを支持する支持部材と、前記撮像手段が撮像した画像に基づき前記作業場所での作業対象物と当該作業ロボットとの相対位置を認識し、その相対位置に基づき前記作業対象物に対する作業を前記作業腕に行わせる作動制御手段と、前記作業が人と共存、協調して行う作業であることを認識すると、前記作業腕の関節を作動させるモータの出力を低下させる出力制御手段と、を具えてなる吊下げ型作業ロボットである。
(もっと読む)
搬送システム,ロボット装置及び搬送方法
【課題】小型のロボットを用いながらも相対的に大重量のワークの搬送を自動化できるようにした、搬送システム,ロボット装置及び搬送方法を提供する。
【解決手段】ワークWを懸垂して支持するクレーンユニット102を水平方向に移動可能とするクレーン移動機構103と、ワークWを支持したクレーンユニットを保持して移動させるマニピュレータユニット101と、を有し、第1位置にあるワークWをクレーンユニットにより支持させ、ワークWを支持したクレーンユニット102を第2位置側に移動させて、支持したワークWを第2位置に載置する。
(もっと読む)
塗装ロボットの教示方法および塗装方法
【課題】 塗装ロボットの動作エラーの発生を抑制することができる塗装ロボットの教示方法、および塗装ロボットの動作エラーの発生を抑制することにより、被塗物を効率よく塗装することができる塗装方法を提供すること。
【解決手段】 自動車ボデー2の三次元データを読み込み、自動車ボデー2の塗装範囲を画成するための基準となる複数の塗装ポイントと、複数の塗装ポイントのそれぞれに対応するコンベヤ値Cvとからなる仮教示点をシミュレーションにより設定し、複数の仮教示点を、コンベヤ値Cvの特定範囲ごとに複数の塗装範囲群に区分する。そして、各前記塗装範囲群におけるコンベヤ値Cvの特定範囲の中間値を算出し、各中間値を、塗装範囲群における塗装ロボット4の動作開始点となるように設定することによって、塗装ロボット4に教示する。そして、その塗装ロボット4を用いて塗装する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させず、凸部の凹部への挿入を短時間で完了でき、ロボットアームの可搬重量や可動範囲が制限されない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102を保持する保持台4と、保持台4に設けられロボットアーム1が凹部103に凸部を有する部品102を挿入させるとき凹部を有する部品101又は凸部を有する部品102が受けるモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5aと、保持台4を挿入方向に直交する方向に移動可能に支持する受動機構5bとを備え、凹部103に凸部を有する部品102を挿入させるとき、保持台4に固定された部品が受ける挿入方向の並進力により受動機構5bが変位し、検出されたモーメントに基づきアクチュエータ5aにより保持台4を移動操作する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させることなく、凸部の凹部への挿入を短時間で完了することができ、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して移動操作し凹部103に凸部が設けられた部品102の凸部を挿入させるロボットアーム1と、凸部が設けられた部品102を保持する保持台と、保持台4に設けられ凹部103に凸部を挿入させようとしたときに凹部を有する部品101または凸部が設けられた部品102が受ける並進力及び/又はこれらの軸周りのモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5とを備え、力覚センサ2により検出された並進力及び/又はモーメントに基づき、凸部の先端部の当接位置の凹部103の中心からの方向及び距離を算出し、これらに応じて保持台4を移動操作し、凸部を凹部103に挿入させる。
(もっと読む)
ロボットオフラインプログラミング装置
【課題】実機と同じ動作をするシミュレーションが可能なオフラインプログラミング装置を提供する。
【解決手段】ロボットオフラインプログラミング装置28は、NCシミュレータ10の第1通信モジュール26と通信回線24により接続され、第1通信モジュール26と信号等の情報の通信を行う第2通信モジュール30と、前記情報に基づいてロボットのシミュレーションを行うロボットシミュレーション装置すなわちロボットシミュレータ32と、ロボットシミュレータ32でのシミュレーション結果を用いてオフラインで教示プログラムを作成するプログラム作成装置34とを有する。ロボットシミュレータ32には、シミュレーション対象についての3次元CADモデルや仕様を表すデータが格納される。
(もっと読む)
組立装置
【課題】部材の移動操作の精度を特段に向上させる必要を生ずることなく、凸部を有する部材の凹部への挿入を短時間で完了することができ、さらに、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101または凸部を有する部品102を把持して移動操作し凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102または凹部を有する部品101を保持する保持台4と、保持台4を挿入方向に直交する方向及び/又は挿入方向に直交する軸周りの回転方向に移動可能に支持する受動機構5とを備え、ロボットアーム1が凹部103に凸部を挿入させようとしたときに、保持台4に固定された部材が受ける挿入方向の並進力及び/又はこれに直交する軸周りのモーメントにより受動機構5が変位され、凸部を有する部品102の凸部が凹部103に挿入される。
(もっと読む)
シミュレーション方法
【課題】人間とロボットとの協調作業による生産システムの立上げ時間を短縮する。
【解決手段】作業者(4)とロボット(5)とが協調して行う生産作業のシミュレーションを行うシミュレーション方法は、作業者の各身体部位の可動範囲と動作速度とを含む動作特性を指定する指定工程と、作業者の配置可能な位置とロボットの配置可能な位置との組合せ毎に、動作シミュレーションにより作業者とロボットとの協調による生産作業の所要時間を算出して、算出された所要時間から所要時間が最も短い作業者の位置とロボットの位置との組合せを決定する決定工程と、を含む。
(もっと読む)
1 - 20 / 86
[ Back to top ]