
Fターム[3C007LV15]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423) | 運転状態の切替 (114)
Fターム[3C007LV15]に分類される特許
21 - 40 / 114
加工システム及び加工方法
【課題】加工装置による加工動作の最中やその直前においても、加工装置の位置決め制御の精度を向上させ、ひいては加工装置による加工精度も向上させること。
【解決手段】加工機12が取り付けられたロボット11は、ワーク2の加工対象の目標位置41までの移動動作と、加工対象に対する加工動作とを行う。ロボット移動機構14は、ロボット11を、搬送台車18により搬送されているワーク2と並走するように移動させる。ロボット制御装置17は、同期センサ15の検出結果を用いてロボット移動機構14の移動を制御し、視覚センサ13又は同期センサ15の検出結果を用いてロボット11の位置決め制御を実行する。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法

【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
パラレルリンク型ロボット及びその異常検知方法
【課題】いずれかのリンクの制御に異常が発生したことを検知するパラレルリンク型ロボットを提供する。
【解決手段】パラレルリンク型ロボット100は、第1部材11に連結されている第2部材12のN自由度の姿勢を制御することができる。ロボット100は、N本の主リンク13、補助リンク15、センサ17b、及びコントローラ20を備える。N本の主リンクは、夫々が第1部材と第2部材を連結しており、アクチュエータ14によって伸縮する。補助リンク15は、第1部材と第2部材を連結しており、外力によって受動的に伸縮する。センサ17bは、補助リンクの長さを計測する。コントローラ20は、第2部材の姿勢を目標姿勢に一致させるように主リンクの長さを制御する。コントローラ20は、計測された補助リンクの長さが第2部材の姿勢が目標姿勢に一致した場合の補助リンクの予定長さと異なる場合に、リンクの制御に異常が発生していると判断する。
(もっと読む)
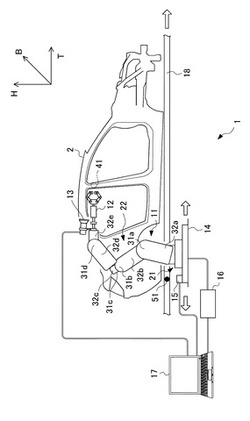
加工システム及び加工方法
【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
ロボット制御装置及び方法
【課題】ビジュアルサーボ制御中に、ワークがロボットに対して相対移動してカメラの視野から外れた場合でも、焦点距離を変化させるズーム機構のないカメラを用いて、短時間にワークを再補足することができるロボット制御装置及び方法を提供する。
【解決手段】ワーク1の位置と姿勢をカメラ2で計測し、計測結果に基づいてロボット3をフィードバック制御し、カメラをワークの移動に追従させるビジュアルサーボ制御(S1〜S7)と、ビジュアルサーボ制御中に、ワークがカメラの視野から外れた場合に、認識したワークの最終位置mxp,myp,mzpを基に、カメラの目標位置mx0,my0,mz0と移動速度を変更してワークを再捕捉する再捕捉制御(S11〜S14)とを有する。
(もっと読む)
スポット溶接システム
【課題】撮像装置を用いることなくワーク位置修正を可能とする。
【解決手段】可動電極駆動用のサーボモータ24のトルクまたは速度と相関関係のある物理量を検出する物理量検出手段24aと、一対の電極21,22の位置を検出する位置検出手段13a,24aと、動作モードを切り換えるモード切換手段6と、スポット溶接モードにおけるスポット溶接処理および位置修正モードにおける位置修正処理を実行する処理手段3,4とを備える。処理手段3,4は、位置修正モードに切り換えられると、可動電極21がワーク表面に当接するようにスポット溶接ガン2およびロボット1を制御するとともに、物理量検出手段24aの検出値に基づき、可動電極21がワーク表面に当接したか否かを判定し、そのときの位置検出手段13a,24aの検出値に基づき、ワーク位置を演算する。
(もっと読む)
ロボット装置及びその制御方法
【課題】操作性を向上させたロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置10は、移動可能な台車部1と、台車部1に回動可能に連結されたロボットアーム2と、ロボットアーム2及び/又は台車部1を操作するための操作情報を入力する操作手段と、操作手段を台車部1に相対移動が可能となるように接続する接続手段と、操作手段の相対位置を検出する位置検出手段と、台車部に設けられ、操作手段からの操作情報と、位置検出手段により検出された操作手段の相対位置とに基づいて、ロボットアーム2及び/又は台車部1の駆動を制御する制御手段と、を備えている。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
ロボットアーム制御装置、その制御方法及びプログラム
【課題】安全性を向上させたロボットアーム制御装置、その制御方法及びプログラムを提供すること。
【解決手段】ロボットアーム制御装置1は、複数の関節部を有するロボットアーム2と、ロボットアーム2に対して作用する外力を検出する外力検出手段と、外力検出手段により検出されたロボットアーム2の外力に基づいて、ロボットアーム2のインピーダンス制御を行う際の位置補正量を算出する位置補正量算出手段と、ロボットアーム2の移動目標位置を指定するための手先位置指令値を生成する指令値生成手段と、位置補正量算出手段により算出される位置補正量と、指令値生成手段により生成された手先位置指令値と、に基づいて、ロボットアーム2の各関節部の駆動を制御する駆動制御手段と、を備えている。指令値生成手段は、位置補正量算出手段により算出される位置補正量が所定量以下になるまで、手先位置指令値の生成を停止する。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路
【課題】予測できない環境の変動があっても、作業者が簡単で短時間にロボットアームの教示を行うことが可能なロボット制御を実現することができる、ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路を提供する。
【解決手段】動作情報データベース17に記憶されたロボットアーム5の動作情報を取得し、人4Aがロボットアームを操作してその動作補正時の補正動作情報を取得し、環境情報を取得部19で取得し、ロボットアームが動作中に動作情報を動作補正部20で補正し、補正された動作情報と取得した環境情報とにより、ロボットアームが自動で動作するための制御ルールを制御ルール生成部23で生成し、生成された制御ルールに基づいてロボットアームの動作を制御する。
(もっと読む)
妨害電磁波制御方法、妨害電磁波制御プログラム及びロボット
【課題】電磁波放出レベルを抑制する。
【解決手段】規制レベル検出手段12は、対象装置の現在位置を取得し、地図情報に基づいて現在位置を含む対象領域の電磁波規制レベルを検出する。動作状態選択手段13は、形状別電磁波レベル情報及び部位別電磁波レベル情報に登録されている動作状態から検出した電磁波規制レベルに適合する電磁波放出レベルに対応する動作状態を選択する。そして、駆動制御手段14は、選択した動作状態に応じて複数の部位を駆動する駆動指示を出す。
(もっと読む)
多関節ロボット
【課題】フィードバック制御の異常を判断する多関節ロボットを提供する。
【解決手段】多関節ロボットは、各関節角を検出するセンサと、センサの検出値に基づいて関節をフィードバック制御するコントローラを備えている。コントローラは、予め用意されたロボットの運動方程式に、一つの特定関節を除いて他の関節角にセンサの検出関節角を代入して特定関節の角度を算出し、特定関節の算出関節角と検出関節角の角度差が予め定められた許容範囲から外れている場合に、特定関節のフィードバック制御が異常であると判断する。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
移動体
【課題】断線の発生に伴い移動体の状態の連続性が損なわれる事態を防止する
【解決手段】上位制御部200から配線500を介して中間制御部400に出力される指示信号を、中間制御部400の指示信号記憶部413に記憶させ、この指示信号記憶部413に記憶されている指示信号に応じた制御信号を、電動モータのドライブ回路ユニットなどを含む制御ユニット50に対して出力する。
(もっと読む)
吊下げ型協調作業ロボット
【課題】人と共存、協調する作業場所に作業ロボットを投入する場合に、作業場所の近傍の床上の障害物があっても作業ロボットを配置することができ、その作業ロボットを配置した際に作業者の安全を確保することができ、しかも高精度の位置決めも作業命令の大規模な改変も必要としない作業ロボットを提供することにある。
【解決手段】撮像手段と、可動部を逆入力可能に駆動する関節を持つ少なくとも1本の作業腕と、前記作業腕を支持する胴部と、作業場所の天井又は壁に基部を着脱可能に固定されて吊り下げられるとともに先端部で前記胴部と前記撮像手段とを支持する支持部材と、前記撮像手段が撮像した画像に基づき前記作業場所での作業対象物と当該作業ロボットとの相対位置を認識し、その相対位置に基づき前記作業対象物に対する作業を前記作業腕に行わせる作動制御手段と、前記作業が人と共存、協調して行う作業であることを認識すると、前記作業腕の関節を作動させるモータの出力を低下させる出力制御手段と、を具えてなる吊下げ型作業ロボットである。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
ロボット、搬送装置、及び慣性センサーを用いた制御方法
【課題】慣性センサーの出力の誤差によって制御装置が情報を誤認識することで、正しい制御が損なわれることを抑制することができるロボット、搬送装置、及び慣性センサーを用いた制御方法を提供する。
【解決手段】搬送装置は、移動部と、移動部の駆動源と、駆動源の位置情報を出力する位置センサーと、移動部が移動させられる際の慣性力情報を出力する慣性センサーと、移動部の移動を規定する制御指令を出力する制御指令発生部と、を備える搬送装置であって、移動部の移動動作を制御する際に、慣性力情報を用いるか否かを決定する制御切替決定部と、制御切替決定部が慣性力情報を用いることを決定した場合には、制御指令、位置情報、及び慣性力情報に拠って第一の制御を実施し、制御切替決定部が、慣性力情報を用いないことを決定した場合には、制御指令、及び位置情報に拠って第一の制御とは異なる第二の制御を実施する動作制御部と、を備える。
(もっと読む)
21 - 40 / 114
[ Back to top ]