
Fターム[3C007LV15]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423) | 運転状態の切替 (114)
Fターム[3C007LV15]に分類される特許
61 - 80 / 114
簡易設置型ロボット用出力制限機能付電力供給システムおよびそのシステムを具えた簡易設置型ロボット

【課題】大きなモータピーク電流を実現しながら、必要とされる安全性の度合いに応じて出力可能な電力を調整することで、ロボットの安全性と有用性を両立させることのできるロボット用電力供給システムを得る。
【解決手段】モータ出力レベルの異なる複数の動作モードを有し、商用交流電源から各軸のモータの駆動電力としての直流電力を得るための少なくとも1つの電力変換回路と、電力変換回路から充電可能なバッテリとを具え、複数の動作モードのうち、モータ出力レベルの大きい動作モードでは、バッテリからの出力を商用交流電源からの出力と並列接続するロボット用電力供給システム。
(もっと読む)
ロボット制御方法、ロボット制御装置、及びロボット操作装置

【課題】ロボットアームの手先部の制御において、特異点の近傍で関節軸の移動量が極端に大きくなるという事象や、動かなくなるという事象の発生を防ぐ。
【解決手段】 本発明に係るロボット制御方法は、全体の自由度がM次(Mは自然数)であり制御変数の次数がN次(Nは自然数)でありMはN以上であるロボットにおける制御の方法であって、変化を指示された変数の次数をL次(Lは自然数)とすると、上記制御変数のうち、変化を指示された変数を含むL次以上(N−1)次以下の変数のみを厳密制御しそれ以外の変数を曖昧制御することを特徴とする。
(もっと読む)
移動ロボットの操縦システム
【課題】移動ロボットの移動モードが操縦モードから自律移動モードに切り替わる際の操縦者の違和感を軽減することができる移動ロボットの操縦システムを提供する。
【解決手段】本発明の操縦システム1は、操縦モード時に操縦者が移動ロボット2を操縦する操縦部8と、移動ロボット2の周囲にある障害物Oを検出する障害物検出部530と、移動ロボット2の現在位置を推定する位置推定部510と、移動ロボット2が障害物Oに接触するか否かを判定する判定部542と、移動ロボット2が自律移動モードで障害物Oを回避する経路Rを生成する回避経路生成部543と、移動ロボット2の移動モードを操縦モードから自律移動モードに切り替える切り替え部6と、操縦モードから自律移動モードに切り替わったことを操縦者に通知する通知部3と、を備える。
(もっと読む)
ロボット及びその制御方法
【課題】 ロボット及びその制御方法を提供する。
【解決手段】 ロボットは、動作全般を制御する第1制御部の障害を考慮してこれを補助するための第2制御部をさらに備え、ロボットの障害発生時に第2制御部がロボットを制御し、あらかじめ決定された安全を考慮した動作を取るようにする。特に、安全を考慮した動作を比較的簡単な動作に制限し、この安全を考慮した動作を制御するための第2制御部を、演算能力の比較的低い安価の演算装置とすることによって第2制御部の追加にかかるコストを節減する。
(もっと読む)
ロボットのダイレクトティーチ制御装置
【課題】作業者がロボットと直動外部軸との間で制御対象を簡単且つ迅速に切換えれるようにする。
【解決手段】マスターコントローラ16は、第1の閾値以上の大きさを持つ外力が第1の規定時間以内で消滅する信号波形を一定時間以内に2回にわたって判定すると、ロボット1及び直動外部軸11のうち現在の制御対象としている一方を制御対象外とすると共に現在の制御対象外としている他方を制御対象として切換え、第2の閾値以上の大きさを持つ外力が第2の規定時間以上にわたって継続する信号波形を判定すると、その第2の閾値以上の大きさを持つ外力が力学センサ10に付与されている期間において現在の制御対象に対してダイレクトティーチ制御を行う。
(もっと読む)
安全制御方法および安全制御システム
【課題】 操作者の負担を軽減して安全制御システムの安全性をさらに向上させる。
【解決手段】 ワイヤレスティーチングペンダント2(21〜24)に設けられ、当該ペンダント2のID番号をロボット3のコントローラ4に送信するためのRFIC225と、コントローラ4に設けられ、ペンダント2から送信されたID番号を受信するためのRFIC405と、ペンダント2がペンダントホルダ6から取り出されたことを検知する安全スイッチ部62と、安全スイッチ部62による検知時にロボット3をメンテナンスモードに移行させ、操作可能エリア10に配置されかつコントローラ4により受信されたID番号を有するペンダント2の当該ID番号を登録リストに登録するとともに、エリア10の外に移動したペンダント2のID番号を登録リストから消去し、登録リストに登録されたID番号のペンダント2のみをイネーブル状態にするコントローラ4とを設ける。
(もっと読む)
ロボット制御システム
【解決手段】 操作者が操作手段11のプログラム実行スイッチ11Bを押すと、ロボット2が手動運転モードから自動運転モードに切り換えられて、注ぎプログラムPが実行される。すなわち、グリッパ2Bにより待機位置Aの試験管3が把持されてから注入位置Bまで移送され、そこで試験管3が回転されて受け入れ容器5に液体が注ぎ入れられる。上記待機位置Aでグリッパ2Bが試験管3を把持する際の把持位置は位置演算部13Bによって検出されており、グリッパ2Bによる試験管3の把持位置が予め想定した基準位置とずれている場合には、そのずれ量だけ、その後のグリッパ2Bの移動軌跡が修正される。
【効果】 従来と比較して操作者の作業負担を軽減することができる。
(もっと読む)
三次元自動領域によるマルチアームロボットシステムの干渉検査
【課題】衝突回避制御システムにおいて、三次元およびリアルタイムの衝突検出、ロボット運動の前もったロボットシステムへの通信、衝突しないプログラム軌道の条件および重要な工程経路の保護を提供する。
【解決手段】本発明によるシステムは一連の命令を含み、その一連の命令は干渉検査自動領域方法を行うために、一連の命令を実行するコントローラに格納されている。干渉検査自動領域方法は、第一のプログラム経路に沿った第一ロボットの動作時に占有される、共通空間の第一の部分を決定する工程と、第二のプログラム経路に沿った第二ロボットの動作時に占有される、共通空間の第二の部分を決定する工程と、第一の部分および第二の部分の間に重複部分が存在するか否か決定するために、第一の部分および第二の部分を比較する工程と、重複部分の存在に対応して第一ロボットおよび第二ロボットを動作させる工程とを含む。
(もっと読む)
作業用ロボットおよび同作業用ロボットに適用されるコンピュータプログラム
【課題】操作器を用いた操作者によるエンドエフェクタの位置決めや姿勢決めを簡単かつ高精度に行え、作業精度を向上させることができる作業用ロボットを提供する。
【解決手段】作業用ロボット100は、複数の自由度を備えてエンドエフェクタであるシリンジ112を変位させるロボットアーム110と、同ロボットアーム110の作動を制御するスレーブ制御装置120およびマスタ制御装置130と、ロボットアーム110を操作するためのマニピュレータ131aとを備えている。スレーブ制御装置120は、ワーク座標系内にシリンジ112の位置と姿勢を規制するための吸着点APgridの集合である吸着要素パターンAPを設定する。そして、スレーブ制御装置120は、マニピュレータ131aの操作によるシリンジ112の位置姿勢目標値に直近の吸着点APgridを位置姿勢目標補正値として特定し、同位置姿勢目標補正値に向かってシリンジ112を変位させる。
(もっと読む)
医療用ロボット、および医療用ロボットのパフォーマンス要求事項を充足する方法
本発明は、医療用ロボット(R)、および医療用ロボット(R)のパフォーマンス要求事項を充足する方法に関する。ロボット(R)は、複数の軸(1〜6)と制御装置(17)とを有する。医療用工具(21〜24)は、ロボット(R)の取付装置(18)に取り付けられ、ロボット(R)の作業領域(30)は、そのロボット(R)がそれら医療用工具(21〜24)のパフォーマンス要求事項を充足するように、特に信頼度の高い技術で制御装置(17)によって設定される。 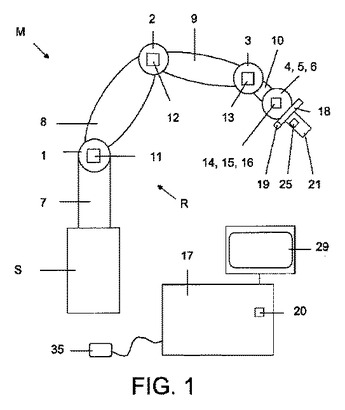 (もっと読む)
(もっと読む)
ロボット、ロボットプログラム共有システム、ロボットプログラム共有方法およびプログラム
【課題】共有プログラムデータベースからプログラムを検索する際に、簡単な操作でプログラムを取得できるロボットプログラム共有システムを提供する。
【解決手段】ロボット200の、所定の事象を検知するイベント入力部205と、イベント入力部205で所定の条件に適合する事象を検知した場合に、その条件に応じて、プログラム取得指令またはプログラム実行指令のいずれかを含む指令を生成するコマンド生成部206と、プログラム取得指令を生成した場合に、イベント入力部205で検知した事象に応じて共有プログラムデータベース100から所定のプログラムを検索してダウンロードするプログラム検索部212と、プログラム実行指令を生成した場合に、ロボット200に格納しているプログラムを実行するプログラム実行部204と、を備える。特に、イベント入力部205は、動作を表す明示的な言語の媒介によらない事象を検知する。
(もっと読む)
ロボット及び生産システム
【課題】ワーク搬送路に沿って並ぶ複数の工程エリアに夫々設けられたロボットにより、ワークに対して複数の作業工程を順に実行するものにあって、全体の小型化を図る。
【解決手段】ワークWが搬送されるワーク搬送路13に沿って、ワークWに対する作業を順に行うロボット12を備える複数個の作業ステーション14〜17を配置して生産システム11を構築する。ロボット12を、直線移動レール18の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
ロボット、その行動制御方法およびその行動制御プログラム
【課題】比較的安価な構成で各種の行動の制御を信頼性よく行うことのできるロボット、その行動制御方法およびその行動制御プログラムを得ること。
【解決手段】モード切替スイッチ117がオンのとき、ロボット101のカラーセンサ取付部114は、RGB−LED部125で対象物を3原色で照射し、その反射光をR、G、Bの各センサでそれぞれ分離して検出する。検出後のR、G、Bの各信号レベルは動作制御テーブルで比較され、一致する行動が実行される。対象物のカラープレートは、ダイクロイックミラーを使用することで、長期間特性が安定する。
(もっと読む)
ロボット制御装置
【課題】ロボットに想定されている動作領域全体における各種動作、およびロボットの特定の領域における特定の動作について、両立して高い精度が確保されるロボット制御装置を提供する。
【解決手段】制御装置12は、ロボット11の動作を規定する実行プログラムに含まれるアプリケーションが特定領域における特定動作であるときに限り、専用パラメータ取得部36で取得した専用パラメータを適用してロボット11を制御する。一方、制御装置12は、特定領域外における特定動作でないとき、汎用パラメータ取得部35で取得した汎用パラメータを適用してロボット11を制御する。そのため、ロボット11の制御には、特定領域における特定動作であるとき専用パラメータが適用され、その他の領域および動作では汎用パラメータが適用される。
(もっと読む)
ロボットおよびタスク実行システム
【課題】複数のロボットのそれぞれによりタスクが円滑に実行されうるように、他のロボットに搭載されている複数のアクティブセンサの相互干渉を回避することができるロボット等を提供する。
【解決手段】複数のロボットRのそれぞれに搭載されているアクティブセンサが相互に干渉する可能性があり、かつ、自己ロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度が、他のロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度よりも低い状況において、自己ロボットRの当該アクティブセンサの感度が下げられる。タスクへの寄与度が比較的低いアクティブセンサの感度が下げられることにより、アクティブセンサの相互干渉が回避され、かつ、ロボットRによる当該タスクに支障が生じる事態が回避されうる。
(もっと読む)
情報処理装置、情報処理方法
【課題】 ロボットの動作教示において、操作者にとって直感的に指示が行える技術を提供すること。
【解決手段】 操作入力部200は、ロボット500における可動部分の移動方向を制御するためにユーザが操作する操作盤から、制御対象の可動部分を移動させる方向を示す方向指示を取得する。操作者位置取得部300は、ユーザの視点の位置を取得する。操作座標変換部400は、視点の位置から方向指示による方向への移動ベクトルを、ロボット500を基準として定義される座標系における移動ベクトルに変換する。そして、操作座標変換部400は、変換後の移動ベクトルに従って、制御対象の可動部分を移動させる為の指示を、ロボット500に対して出力する。
(もっと読む)
ロボットのターゲット位置検出装置
【課題】 ターゲットの位置を高精度で検出することができるロボットのターゲット位置検出装置を提供する。
【解決手段】 ロボット22は、X軸、Y軸、Z軸の3軸方向に自由度を有するアーム32の先端部に、水平方向の自由度を有する手首が設けられ、この手首にはエンドエフェクタであるハンド33が設けられる。制御手段23は、教示点を記憶部26に記憶させ、この記憶部26に記憶させた教示点にハンド33が向かうように、ロボット22の動作を制御する。この制御手段23は、制御ループゲインを変化させて、ハンド33のターゲット46への押付け力を変更可能であって、少なくともターゲット46が存在する教示点近傍から、手首軸の制御ループゲインを所定値よりも低下させて、ハンド33をターゲット46に接触させ、ハンド33がターゲット46に接触した状態における位置を取り込んで、ターゲット46の位置を検出する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】物体に衝突する際に位置制御と力制御の切り替えを円滑に行なう。
【解決手段】把持する物体の位置情報や形状情報が正確でないと、把持の失敗、把持対象物の転倒や破壊などの可能性がある。ロボット装置は、加速度制御をベースとして位置制御を行ない、指先や手先が物体に接触したときには、位置指令値を満足することよりも、大きな衝撃力を加えないことを優先する。また、指先や手先が物体などの外界と接触した直後から接触力を正確に加えることができ、把持や操作の計画が立て易い。位置制御中に物体と衝突しても所定値を超える接触力は発生せず、衝突した直後から与えられた接触力を追従する。
(もっと読む)
動作支援装置およびその制御方法
【課題】上肢の動作を動作支援時に、皿等の食器や、使用者へのマニピュレータの接触を回避し得る動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段と、該上肢の位置を検出する第2検出手段とを有し、これら各検出手段からの情報によって制御下に作動するマニピュレータを備え、上肢の動作から生成される作動目標速度情報を、マニピュレータの作動空間内に存在する対象物とマニピュレータの作動方向との関係に応じて設定される複数の速度係数から、抽出された第2検出手段の検出に基づくマニピュレータの位置と作動目標速度情報とに対応する速度係数に基づいて補正してマニピュレータを作動させる作動速度情報を生成することで、該上肢の動作を好適に支援するようにした。
(もっと読む)
ロボット充電システム
【課題】接合箇所に対する損傷を低減することができるロボット充電システムを提供すること。
【解決手段】ロボットは、ロボット処理部とバッテリとロボット側接合部とを具備している。充電ステーションは、台と、台の一端部に設けられたステーション側接合部と、台上に設けられた走行路と、台上に走行路に対して平行に設けられたパターンテープと、を具備している。パターンテープは、第1〜第3パターンが台の他端部からステーション側接合部に向かってこの順に表記されている。ロボット処理部は、第1パターンを読み取ったとき、ロボットを走行路に搭乗させて走行路上を走行させ(第1制御処理)、第2パターンを読み取ったとき、走行路上を走行するロボットを減速させ(第2制御処理)、第3パターンを読み取ったとき、走行路上を減速するロボットを停止させ、ロボット側接合部とステーション側接合部とを接合する(第3制御処理)。
(もっと読む)
61 - 80 / 114
[ Back to top ]