
Fターム[3C007WC21]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | ロボット本体の構成の特徴 (330)
Fターム[3C007WC21]の下位に属するFターム
脚 (166)
頭、顔、首 (37)
胴体 (33)
腰 (21)
生物的特徴を出すための構成 (17)
Fターム[3C007WC21]に分類される特許
1 - 20 / 56
多関節ロボットおよびロボット関節構造
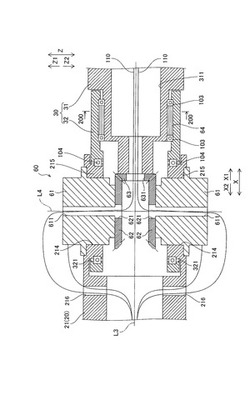
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
脚式ロボット

【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
関節構造、及びその関節構造を備えたロボット
【課題】第1の部材に対する第2の部材の相対的な角度に応じて、伝動ベルトのテンションが増減する技術を提供する。
【解決手段】第1実施形態に係る関節構造Jは、関節軸Cを有する体幹部2と、体幹部2の関節軸C回りに回転可能となるように体幹部2によって支持される上腕部5と、体幹部2に回転可能に設けられ、肩関節駆動モータ34(駆動源)によって回転駆動される駆動プーリ11と、上腕部5に回転不能に設けられる従動プーリ12と、駆動プーリ11と従動プーリ12の間に掛けられる平ベルト13(伝動ベルト)と、を備えている。従動プーリ12の外周12aは略円形である。従動プーリ12の中心軸Dは、関節軸Cからずれている。
(もっと読む)
移動型ロボットシステム
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
ロボット及びロボットの外力検出機構
【課題】ロボットに対する外力の大きさや入力方向を正確に検出することが可能なロボットの外力検出機構を提供する。
【解決手段】ロボット1は、上部上体241と下部上体242とが連結軸701を介して揺動可能に連結された関節を有する。6軸力覚センサ38は、その外力入力部382の軸心が連結軸701と同軸となるように配置され、上部上体241から下部上体242に作用する外力を検出する。
(もっと読む)
自律移動装置
【課題】装置自体および周囲に対して高い安全性を有する自律移動装置を提供する。
【解決手段】自律移動装置は、移動手段を備える本体部120と、本体部に設けられ、脱力したときに先端が装置載置面に接触する、または、脱力したときに本体部に接触する長さを有する1または複数のアーム部130R,130Lと、装置を駆動する駆動機構を制御する制御部と、を備える。制御部は、装置が停止状態にされるとき、当該装置を停止状態とする前に、アーム部を本体部に設けられたアーム載置部126に移動して載置させた後脱力させる。
(もっと読む)
ロボットアームおよびその修復方法
【課題】 人と協調して作業するロボットアームで、安全確保した上で、ロボットアームを小型化できるようにする。
【解決手段】 熱可塑性樹脂マトリックス部による硬質なロボットアーム表層部に検知対象物が近接することを出力電圧変化として検出し、この出力電圧のレベルによってロボットアーム表層部を加熱軟化させ、検知対象物と接触した際の安全を確保する。
(もっと読む)
駆動部を持つシステムとその制御方法と制御装置並びにプログラム
【課題】所望の動作を円滑、且つ高速に実現する装置、方法、システム、プログラムの提供。
【解決手段】システムの駆動部(50)を制御してシステムの軌道を制御する制御装置(1)が、システムの軌道を設定する軌道設定部(10)と、前記軌道設定部によって設定された軌道に基づき信号を生成する軌道連動信号発生部(20)と、ランダムな信号を生成するランダム信号発生部(30)と、前記ランダム信号発生部からのランダム信号と前記軌道連動信号発生部で生成された信号とを統合した信号を生成し、前記生成した信号を駆動部(50)に送る統合信号発生部(40)と、を備えている。
(もっと読む)
ロボット
【課題】 軽量、安全かつ優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
(もっと読む)
器用な人間型ロボットの手首
【課題】器用な人間型ロボットの手首を提供すること。
【解決手段】人間型ロボットが、胴部、一対の腕、首、頭部、手首関節アセンブリ、および制御システムを備える。腕および首は、胴部から可動可能に延在する。腕はそれぞれ、下腕および下腕に対して回転可能である手を備える。手首関節アセンブリは、下腕と手との間で動作可能に画定される。手首関節アセンブリは、ヨー軸およびピッチ軸を備える。ピッチ軸は、ヨー軸およびピッチ軸が概して垂直になるように、ヨー軸に対して離間された関係において配置される。ピッチ軸は、ヨー軸と下腕との間に延在する。手は、ヨー軸およびピッチ軸のそれぞれを中心として下腕に対して回転可能である。制御システムは、手首関節アセンブリのヨー角およびピッチ角を決定するように構成される。
(もっと読む)
ロボット指アセンブリ
【課題】ロボット指アセンブリを提供すること。
【解決手段】ロボット手が、第1、第2、および第3の指骨を有する指を備える。第1の関節が、ベース構造体に対して第1の指骨を回転自在に連結する。第2の関節が、第2の指骨に対して第1の指骨を回転自在に連結する。第3の関節が、第2の指骨に対して第3の指骨を回転自在に連結する。第2の関節および第3の関節は、第2の指骨に対する第3の指骨の位置が第1の指骨に対する第2の指骨の位置によって決定されるように、運動学的にリンクされる。
(もっと読む)
ロータリ直列型弾性アクチュエータ
【課題】器用な人間型ロボット用の上腕アセンブリを作動させるためのロータリアクチュエータアセンブリを提供すること。
【解決手段】人間型ロボットのための上腕アセンブリは、それぞれが軸を画定する複数の腕サポートフレームを備える。複数のロータリアクチュエータアセンブリがそれぞれ、各軸を中心として複数の腕サポートフレームの中の1つに設置される。各ロータリアクチュエータアセンブリは、各軸を中心として設置されたモータと、モータに回転可能に連結されたギアドライブと、ねじりばねとを備える。ねじりばねは、ギアドライブの出力部に回転可能に連結されたばね入力部と、関節のための出力部に連結されたばね出力部とを有する。
(もっと読む)
外付け式人間型手のためのアクチュエータおよび電子機器のパッケージング
【課題】外付け式人間型手のためのアクチュエータおよび電子機器のパッケージングを提供すること。
【解決手段】人間型ロボット用の下腕アセンブリは、第1の側および第2の側を有する腕サポートと、腕サポートの第1の側に取り付けられる複数の手首アクチュエータと、腕サポートの第2の側に取り付けられる複数の指アクチュエータと、腕サポートの第1の側にやはり配置される複数の電子機器とを備える。
(もっと読む)
手投げ型ロボット
【課題】ロボットなどに用いられる新たな移動機構の提案。
【解決手段】移動機構として、モータの制御機能を有する本体と、本体の両側に対に設けられ本体に対して回動自在であり走行面に接地する駆動輪と、それぞれの駆動輪をモータでそれぞれ回転させる駆動手段と、それぞれの駆動輪の外側に、走行面に接地すると共に、駆動輪の回動と独立して本体との位置を固定的に保持される保持体とを有する。
(もっと読む)
ロボットハンドの被着装置および着脱方法
【課題】ロボットハンドの骨格部への着脱を容易にし、かつ装置個々の識別を可能にするロボットハンドの被着装置を提供すること。
【解決手段】関節機構によって指の曲げ伸ばしが可能なロボットハンドの骨格部11に被着し、指または全体で物を把持するロボットハンドの被着装置10において、ロボットハンドの骨格部に着脱可能な柔軟素材からなり、指先または手の平の所定位置の表面に装置個々の識別に用いる固有の凹凸形状を有するディンプル模様が形成された構成である。また、ロボットハンドの骨格部と被着装置の内面との空間部分に、有機溶剤に溶解し有機溶剤の揮発によって固まる性質の高分子樹脂PVBを充填する。
(もっと読む)
ロボットハンドの被着装置
【課題】介護ロボットなどが被介護者を介助する際に被介護者に安心感を与えうるロボットハンドの被着装置を提供すること。
【解決手段】関節機構によって指の曲げ伸ばしが可能なロボットハンドの骨格部に被着し、指または全体で物を把持するロボットハンドの被着装置10において、ロボットハンドの骨格部に着脱可能な柔軟素材からなる被着部材と、被着部材に装着され、供給される電力により発熱して前記被着部材を加温するヒーター12,13と、ロボットハンドの起動開始または起動終了を検知する検知手段と、検知手段の検知出力に応じてヒーターをオンオフ制御する制御手段11とを備える。
(もっと読む)
車載ロボット装置
【課題】 ロボット本体を動作させる必要の無いときにロボット本体を格納することが可能な車載ロボット装置を提供する。
【解決手段】 車載ロボット装置1は、車両2のセンターコンソール9の上方に配置されたロボット本体10を備えている。ロボット本体10は、胴体と、この胴体に対して上下動可能に連結された頭部と、胴体に対して回動可能に連結された左右のアームとを有している。ロボット本体10は、センターコンソール9の上に設けられた起き上がり機構によって、フロントコンソール8の収納ボックス20の上面に当接するように寝かせた状態から起き上がった状態に変形可能となっている。ロボット本体10を寝かせた状態では、ロボット本体10が車内装備品の一つであるアームレストとして機能するようになっている。
(もっと読む)
連結部の被覆材
【課題】連結部に巻き込まれることを被覆材により防止しつつ、第一部材と第二部材とが屈曲した際にその被覆材そのものに挟まれることを防止できる連結部の被覆材を提供する。
【解決手段】可撓性を有し、撓み変形可能となるように第一部材14の所定位置に取り付けられる第一端部61と、可撓性を有し、撓み変形可能となるように第一部材14の所定位置から離間して位置する第二部材16の所定位置に取り付けられる第二端部62と、可撓性を有し、第一端部61と第二端部62とに一体的に結合され、連結部を被覆し且つ連結部から離隔可能に設けられる中間部63とを備える。中間部63の曲げ剛性は、全体に亘って、第一端部61の曲げ剛性より大きく設定されている。さらに、第一部材14と第二部材16とが屈曲する場合に、中間部63が連結部から遠ざかるように凸状に変形する。
(もっと読む)
多関節型マニピュレータの制御装置及び多関節型マニピュレータの手先動作軌道生成方法
【課題】適切な逆座標変換計算を行えない際、特異点やその近辺に特異点回避軌道を再生成する計算を行うことなく、計算済みの目標点を再利用可能な多関節型マニピュレータの手先動作軌道生成方法を提供する。
【解決手段】関節部9,11,13がアーム10,12を介して連結され、一端に手先8が設けられた多関節型マニピュレータ7と、多関節型マニピュレータ7に設けられ、関節部9,11,13を駆動する駆動装置と、直線軌道上の目標点に対応する関節角座標への逆座標変換によって求めた関節角座標系における目標値に関節部9,11,13が順次到達するようにこの駆動装置を駆動することにより、手先8を直線軌道上に沿って移動させる制御装置4とを備え、制御装置4は、直線軌道上又はこの近傍に逆座標変換により適切な解が得られない特異点が存在する場合、この特異点が存在する又はその近傍の目標点にこれを中心とする円錐状の回避軌道を生成する。
(もっと読む)
連結部の被覆材および伸張材
【課題】見栄えを良くすることを可能としつつ、人間共存型ロボットの連結部に適用した場合に、内部装置への接触防止を可能としつつ且つ実際の人間に接触した場合と近似した接触感覚を与えることができる連結部の被覆材を提供する。
【解決手段】第一の部材14と第二の部材16とを相互に屈曲可能に連結する連結部の被覆材であって、凹凸状の表面を有しかつ多孔質状に形成され、該表面が延在する方向に伸張変形可能な基材31と、基材31の表面側に配置され、乾燥状態で基材31が伸張変形する方向と同方向に伸張変形可能な外皮層32と、基材31の表面と乾燥状態の外皮層32との間に介装されることにより基材31と外皮層32とを接着し、基材31が伸張変形する方向と同方向に伸張変形可能な中間接着層33とを備える。
(もっと読む)
1 - 20 / 56
[ Back to top ]