
Fターム[3C007WC27]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | ロボット本体の構成の特徴 (330) | 腰 (21)
Fターム[3C007WC27]に分類される特許
1 - 20 / 21
二足歩行ロボット
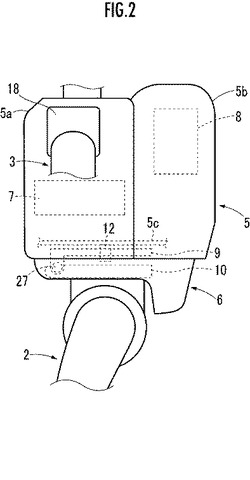
【課題】脚体にかかる負担を軽減してロボットの作業能力を向上させることができる二足歩行ロボットを提供する。
【解決手段】上体1を上側の上部基体5と下側の下部基体6とで構成する。下部基体6に上部フレーム9と下部フレーム10とを設ける。下部フレーム10に脚体2を連結する。上部フレーム9に回転軸12を介して上部基体5を連結する。上部フレーム9を、揺動軸27を介して下部フレーム10に連結する。下部フレーム10に対して上部フレーム9を揺動させることにより、ロボットの上体1で前屈姿勢をとることが可能となる。
(もっと読む)
二足歩行ロボットの股関節構造

【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
歩行ロボットのZMP制御装置
【課題】ファッションモデルのように膝の伸展した優美な2足歩行を実現する2足歩行ロボットのZMP制御装置を提供する。
【解決手段】腰関節を追加して、膝が完全に伸展した場合であっても、腰関節をロール軸周りに回転させることによって右脚を下げ左脚を上げてZMPを右足部に移動させる、あるいは、右足を上げ左脚を下げることによってZMPを左足部に移動させることによって、ZMP制御を可能とし、さらに、ZMP制御の制御遅れを補償するために逆システムあるいはモデルマッチング制御を用いる。
(もっと読む)
コンパクトな駆動ユニットを持つ広報用ロボット
【課題】人体模型を屈伸駆動させる駆動ユニットをコンパクトにして人体模型に内蔵し、人体模型の屈伸動作を滑らかに進行させることでより効果的な広報になるようにした広報用ロボットを提供する。
【解決手段】下体部と、前記下体部の上部に屈伸動作が可能に結合される上体部とを含む人体模型;及び駆動モーター、前記駆動モーターに回転可能に結合されるスクリューバー、前記スクリューバーに昇降可能に結合される昇降部材と、下部は人体模型の下体部に配置され、上部は人体模型の上体部に固定結合されて配置され、固定軸に回転可能に軸設されている回転ロッド、上端は前記回転ロッドの下端に軸設され、下端は前記昇降部材に軸設され、前記固定軸を軸として前記回転ロッドを一定範囲内で回転させる中継ロッドとを含む駆動ユニット;を含んでなる広報用ロボット。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
歩行ロボット
【課題】 本発明は、ピッチ方向大腿部関節及び膝関節の駆動構造が改善された歩行ロボットを提供するためのものである。
【解決手段】 本発明に係る歩行ロボットは、大腿リンクが上体に対してピッチ方向に回転されるように第1ピッチ方向の大腿部関節を駆動する第1ピッチ方向アクチュエータと、下腿リンクが大腿リンクに対してピッチ方向に回転されるように第1ピッチ方向アクチュエータの駆動力を上記膝関節に伝達する動力伝達装置を具備して構成される。
(もっと読む)
人型機械
【課題】
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
(もっと読む)
歩行ロボット
【課題】 歩行ロボットのピッチ方向股関節及び膝関節の駆動構造を改善することで、制御メカニズムが簡単であり、歩行時に脚から発生する慣性力を減少させ、より小さい出力でより自然な歩行が可能な歩行ロボットを提供する。
【解決手段】 胴体及び前記胴体に連結される複数個の脚を含む歩行ロボットにおいて、前記各脚のうち少なくとも一つの脚は、大腿リンクと、前記大腿リンクの下部に設けられる下腿リンクと、前記胴体と前記大腿リンクとを連結し、前記胴体に対して前記大腿リンクをピッチ方向に回動させるピッチ方向股関節と、前記大腿リンクと前記下腿リンクとを連結し、前記大腿リンクに対して前記下腿リンクをピッチ方向に回動させる膝関節とを含み、前記ピッチ方向股関節と前記膝関節は、互いに連動されて一つの連動アクチュエーターによって駆動されることを特徴とする歩行ロボットを構成する。
(もっと読む)
連結アクチュエータを有する球形ヒンジを実装するヒューマノイドロボット
本発明は、連結アクチュエータを有する球形ジョイント(10、100、200)を使用するヒューマノイドロボット(5)及び球形関節を使用する方法に関する。本発明は、擬人化に最も近づくヒューマノイドロボットの製造に特に実用的である。ジョイント(10、100、200)は、ロボット(5)の2つの要素(101、103;105、104;101、102)を接続する。ジョイントは、3つのアクチュエータ(20、35、36)によって動かされ、第1のアクチュエータ(35)及び第2のアクチュエータ(36)は平行に作用しかつ共に連結され、第3のアクチュエータ(20)は、軸線(13)周りに第1の2つのアクチュエータと直列に作用する。本発明によれば、第3のアクチュエータ(20)の軸線は、擬人化に近づくために運動角度範囲が最大でなければならない軸線である。 (もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
昇降装置と被昇降体との連結構造
【課題】被昇降体の左右両外側で昇降する一対の昇降体に、被昇降体の各側部を連結する昇降装置と被昇降体との連結構造において、作業性を向上させると共に安定性を向上させる。
【解決手段】被昇降体1の各側部に設けられ各昇降体20の昇降アーム部20dを把持する把持手段3を、ベース枠30に揺動自在に連結された第1把持片31と、第1把持片31に揺動自在に連結された第2把持片32とで構成し、昇降アーム部20dと被昇降体1とが分離した状態で、第1把持片31が昇降アーム部20dの上下方向の投影空間の外方に位置すると共に、把持部32bが昇降アーム部20dの上下方向の投影空間内に位置し、昇降アーム部20dの上昇で昇降アーム部20dが第2把持片32を押し上げることにより、第1把持片31が第2把持片32を介して引き上げられて、把持部31aが下方から昇降アーム部20dに当接する。
(もっと読む)
2足歩行ロボット
【課題】左右の各脚部の大腿リンクと下腿リンクとを膝関節部から離れた部分で連結する下腿駆動用の直動アクチュエータと、下腿リンクと足平部とを足首関節部から離れた部分で連結する足平駆動用の直動アクチュエータとを備える2足歩行ロボットにおいて、大腿リンク及び下腿リンクの慣性モーメントを小さくして運動性能を向上できるようにする。
【解決手段】下腿駆動用と足平駆動用の各直動アクチュエータ123,124は、電動モータ13とこれにより回転駆動されるナット部材とを備える駆動ユニット15と、ナット部材に螺合するねじ軸16とから成るボールねじ機構で構成される。各直動アクチュエータ123,124の駆動ユニット15の大腿リンクや下腿リンクに対する連結軸線Y3a,X3aはナット部材の中心軸線に直交する。
(もっと読む)
移動ロボットの姿勢制御装置及び方法
【課題】移動ロボットにおいて、狭い通路や場所での旋回性を確保しつつ、高速走行時の転倒に対する安定性を高めることができる移動ロボットの姿勢制御装置及び方法を提供する。
【解決手段】移動ロボット1の走行速度が相対的に遅い場合にはホイールベースWBを相対的に狭くし、走行速度が相対的に速い場合にホイールベースWBを相対的に広くする。また、移動ロボット1の重心位置をホイールベースWBの中央に置く。
(もっと読む)
人型機械
【課題】マネキンや人形、ロボットなど人型機械に対し、人の情動を呼び起こす魅力的で美しい胴体の動作制御を行うこと。
【解決手段】胸部201と腰部202から成る胴体を持つマネキンやロボットなどの人型機械で、肩と腰が連動する美しい動きの表現方法と機構を持たせる。胸部201と腰部202が捻れる動きと同時に、胸部と腰部の左右体側の肩203・204と股関節205・206との距離が交互に開く揺動が同期して連動することで、胴体の美しい表現を可能にした。
(もっと読む)
倒立型移動体および倒立型移動体の移動停止方法
【課題】倒立制御により移動を行う移動体において、倒立状態が不安定となった場合に移動体を安定的に停止させることを可能とする倒立型移動体および倒立移動体の移動停止方法を提供すること。
【解決手段】断面が円形の回転体と、回転体を回転駆動させる駆動部と、回転体を保持する移動体本体と、駆動部を制御し、床面に接する前記回転体の回転駆動を制御することで移動体本体の倒立状態を維持する制御部と、を備える倒立型移動体において、移動体本体を、鉛直方向について相対位置を変化させるように変形可能な接続部材を介して回転体を保持させるとともに、制御部を接続部材の変形を制御して移動体本体と回転体の鉛直方向についての相対位置を変化させるように構成し、前記制御部が移動体本体の倒立状態を維持できない場合に、移動体本体を回転体に対して相対的に鉛直下方に位置を変化させ、移動体本体を床面に接触させるようにした。
(もっと読む)
2足歩行ロボット
【課題】浮揚自在で、軽量化と構造の簡素化を実現した2足歩行ロボットを提供すること。
【解決手段】2つの股関節2a,2bに左右の脚部が装着され、該股関節2a,2bが接続部材1に接続されてなる2足歩行ロボット10であり、股関節2a,2bはロボットを進退させるべく左右の脚部を前後方向に回動させる駆動装置2a1,2b1を備え、左右の脚部の双方には、略平坦なルーバー8,8がその長手方向を脚部の長手方向に向けた姿勢で、一方の脚部における他方の脚部に対向する側面に装着されており、ダクテッドファン7が第2、第3の駆動装置91,92を介して、ファンの回転軸73を一方の脚部側から他方の脚部側へ回動自在に装着され、かつ、ファンからの吹き出し流れがルーバー8,8に直射されるようになっており、股関節の動作に応じたルーバー8,8の傾斜によって浮揚方向が調整される。
(もっと読む)
脚式ロボット
【課題】歩行時に荷物や人を搭載する部分が揺れ難い脚式ロボットを提供する。
【解決手段】脚式ロボット10は、脚部20R、20Lと、体幹12と、コンテナ部16を有する。脚部20R、20Lは体幹12に連結されている。コンテナ部16は、コンテナ支持部材14を介して体幹12に揺動が可能な状態で吊り下げられている。コンテナ部16は、体幹12に揺動可能に吊り下げられているので、その重心Gが回転軸C1の鉛直下方に位置する状態で安定する。従って歩行時に脚部の揺動の反力で体幹12が揺動しても、コンテナ部16は揺動し難い。荷物や人を搭載するコンテナ部16が揺動し難い脚式ロボットを実現することができる。
(もっと読む)
人型ロボットおよび着脱可能型臀部
【課題】 稼働環境や用途に適した臀部を備えた実用性の高い人型ロボットを提供することを目的とする。
【解決手段】 人型ロボット101の下部胴体104の背面に稼働環境や用途に応じて、着脱可能型臀部301を適宜装着する。例えば、椅子に座るのに適した構造を有する着脱可能型臀部301を用意し、これを人型ロボット101の下部胴体104の背面に装着する。こうすることで、重機等の運転席500において、人型ロボット101を椅子501に座らせ、手足を使った運転操作を行わせることができる。また、人型ロボット101に通常の椅子504に安定して座ることができる機能を与えることができる。この発明によれば、着座する機能に優れた実用性の高い人型ロボットを得ることができる。
(もっと読む)
二足歩行ロボット
【課題】二足歩行ロボットにおいて、その歩行時に股関節のロール関節で消費される電力量を抑制する。
【解決手段】複数のリンク部材と該リンク部材の各々を連結する関節部とで構成される脚002を二本有し、該脚002の駆動により歩行を行う二足歩行ロボット001であって、脚の関節のうち二足歩行ロボットの体をロール軸回りに揺らすロール関節008において、該二足歩行ロボットの歩行時に生じる所定重量による該ロール軸まわりの回転モーメントの回転方向と反対側の所定回転方向に、該ロール軸におけるロール角に応じて安定回転モーメントを機械的に発生させる機械的付勢手段036を、該ロール関節008に並列に備える。
(もっと読む)
1 - 20 / 21
[ Back to top ]