
Fターム[3C030DA32]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | 位置決め (713) | 位置決め対象 (378)
Fターム[3C030DA32]の下位に属するFターム
ダイレクト搬送手段上のワーク (79)
搬送手段上の搬送治具 (49)
搬送治具上のワーク (75)
組立ステーション上のワーク (72)
Fターム[3C030DA32]に分類される特許
1 - 20 / 103
蓋物部材の組付治具及び組付方法
【課題】ストライカを有する蓋物部材を車体に組み付ける際の作業性を高め、生産性を向上させる。
【解決手段】車幅方向間隔を調整可能な一対の係止部20,20と、一対の係止部20,20の車幅方向中央部Pを設定するセンタリング機構70と、車幅方向中央部Pを基準とした車幅方向所定位置に設けられ、該車幅方向所定位置にストライカ7を位置決めするストライカ位置決め部30と、ストライカ位置決め部30と同じ車幅方向所定位置に設けられ、該車幅方向所定位置にロック部材8を位置決めするロック位置決め部40とを備える。
(もっと読む)
双腕ロボット

【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】ロボットの自動組立を継続して行う際に様々な要因によって生じ得る作業対象部品などの位置ずれによる「チョコ停」の未然防止を可能とするロボット制御システムおよびロボット制御方法を提供する。
【解決手段】ロボット制御方法の一実施形態では、X軸方向、Y軸方向および回転角θについて水平移動可能なX−Y−θステージ9上に載置された部品供給トレイ5に搭載された作業対象部品をロボットハンド31に取り付けられた小型カメラで撮像する。撮像された画像の画像処理によって、次の作業対象部品を検出して正確な位置を算出するとともに、正常位置データとの比較によって位置誤差を算出して、その位置誤差を補正するような指令をX−Y−θステージ9に与える。そのようにして位置誤差が補正された後に、次の作業対象部品に対する作業を実行する。
(もっと読む)
組付工具
【課題】バルブディスクにバルブ部材を芯ずれなく容易に組付けることができ、組付不良を生じさせない組付工具を提供することである。
【解決手段】上記した目的を解決するために、本発明における課題解決手段は、環状であって軸部材5aの外周に装着されるバルブディスク6と同じく環状であって軸部材5aの外周に装着されるとともにバルブディスク6に設けられたポート7を開閉する環状のリーフバルブ10に積層されるバルブ部材Vを調芯させる組付工具1において、筒状であって内周側にバルブ部材Vの外周に嵌合してバルブ部材Vを調芯するバルブ調芯部2と、バルブディスク6に嵌合してバルブディスク6に調芯されるディスク調芯部3とを備えたことを特徴とする。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
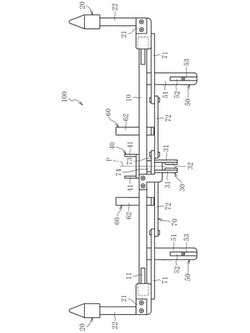
回転抑制装置および回転抑制方法
【課題】簡易な構成で2つの締付部材が供回りするのを防止できる回転抑制装置を提供すること。
【解決手段】回転抑制装置70は、左フォーク11Bの挿通孔111にアクスル15を挿通し、このアクスル15の先端にナット152を螺合させる際に、アクスル15またはナット152の回転を抑制する。この回転抑制装置70は、左フォーク11Bの外周面に当接する外周面当接部723と、左フォーク11Bの挿通孔111近傍に当接する先端当接部713と、アクスル15およびナット152のうち一方に嵌合可能なソケット731と、ソケット731が中心軸を回転軸として先端当接部713に対して回転するのを抑制しつつ、ソケット731を中心軸に沿って先端当接部713に対して進退させるスライド部72および移動部74と、を備える。
(もっと読む)
圧入方法及び圧入装置
【課題】生産ロットの切替え(ロット数や機種の変更)の際に生産ラインを一旦停止することなく、且つワークや圧入部材の種類変更に伴う圧入装置の再設定に要する時間及び工数を低減できる圧入方法及び圧入装置を提供する。
【解決手段】治具置き台18に載置された吸気側圧入治具28aにバルブシート24a及びバルブガイド26aをセットする。次いで、シリンダヘッド22を保持した吸気側圧入治具28aを圧入ステーション20に搬入した後、圧入ユニット29を用いて、バルブシート24a及びバルブガイド26aを吸気側圧入治具28aから取り外してシリンダヘッド22の複数の圧入部にバルブシート24a及びバルブガイド26aを圧入する。次いで、圧入ユニット29による前記圧入が完了した後、吸気側圧入治具28aを圧入ステーション20から搬出し、吸気側圧入治具28aを治具置き台18に載置する。
(もっと読む)
部品組付け装置及び方法
【課題】部品組付け装置の小型化、設置面積の省スペース化、組付け精度の高精度化を図りつつ、種類の異なる組付け対象物において組付けを行えるようにする。
【解決手段】組付け対象物を保持して搬送しつつ作業位置に位置決めする搬送ユニット20、作業位置にある組付け対象物の組付け位置に下方から対応する部品供給位置を画定して部品を供給し位置決めする部品供給ユニット50、作業位置にある組付け対象物の組付け位置に上方から対応する待機位置と部品供給位置との間で昇降自在に支持されて部品を受け取って組付け対象物に組み付け組付けツール31〜33をもつ組付けユニット30、組付けツールが部品供給位置にある部品を受け取り作業位置にある組付け対象物に組付けるべく組付けユニットを昇降駆動する昇降駆動ユニット40を含む。これによれば、構造の簡素化、構造の集約化、装置の設置面積の省スペース化等を達成できる。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】被組付部をセンシングする回数を低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ組付部にサイドエアバッグを配置し、ねじを用いて、このサイドエアバッグをサイドエアバッグ組付部に固定する。このワーク組付方法は、サイドエアバッグ組付部に近接する部分に設けた3つの測定点を撮影する撮影工程と、この撮影した画像に基づいて、測定点の実際の位置A1〜C1を算出する位置算出工程と、この位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、サイドエアバッグとサイドエアバッグ組付部との相関位置を算出して位置決めする第1位置決め工程と、位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、ねじとサイドエアバッグ組付部との相関位置を算出して位置決めする第2位置決め工程と、を備える。
(もっと読む)
部品取付けロボット及び部品取付け装置
【課題】金属粉対策を講じた部品取付け装置を提供することを課題とする。
【解決手段】部品取付け装置10では、部品保持治具16の保持部71の近傍に、ボルト203をねじ込むためにナット199のねじ穴207に向けてエア205を供給するエア噴出し口90と、ナット201のねじ穴に向けてエア206を供給するエア噴出し口100とが設けられている。
【効果】ボルト203のねじ込み前にねじ穴207に金属粉208が付着していた場合であっても、第1エア噴出し口90からエア205を噴出し、金属粉208を除去する。すなわち、本発明によれば、金属粉対策を講じた部品取付け装置10が提供される。
(もっと読む)
自動生産装置
【課題】小型かつ低コストで、多品種に容易に対応可能な汎用性の高い自動生産装置を提供する。
【解決手段】架台2上でワークWに対して複数の作業を行う自動生産装置1は、架台上に設置されてワークの搬送及び複数の作業を行う2基の多関節アーム部6A、6Bと、2基の多関節アーム部に交換可能に取付けられ、ワークの搬送及び複数の作業の少なくとも1つに対応する形状に形成された複数の作業ハンド7と、基台15Aと、基台上に設置されて複数の作業のうち少なくとも1つに使用される作業機構16A〜16Fとを有し、架台上かつ2基の多関節アーム部の少なくとも一方の作業範囲内に交換可能に配置された複数の作業ユニット8と、架台上に設けられ、作業ユニットの配置位置を規定する位置決め手段17と、2基の多関節アーム部及び複数の作業ユニットと接続され、ワークの搬送及び複数の作業を制御する制御部23と、を備える。
(もっと読む)
空気ばねの解体装置
【課題】空気ばねの解体作業の省力化を図ることができる空気ばねの解体装置を提供する。
【解決手段】上下面板S1,S2とこの上下面板に端部をそれぞれ連結した筒状可撓膜体S3とを有する空気ばねを、解体する空気ばねの解体装置であって、脚柱とこの脚柱の上部に設けた上枠とからなる装置本体1と、この装置本体1の脚柱に設けられ、前記空気ばねの下面板をその側方から把持する下面板把持手段7と、前記装置本体1の脚柱に設けられ、前記空気ばねの筒状可撓膜体をその側方から把持する可撓膜体把持手段8と、前記装置本体1の上枠に上下動可能に設けられ、前記空気ばねの上面板をその側方から把持する上面板把持手段9とを備えている。
(もっと読む)
被挿入物の把持・挿入装置および被挿入物の把持・挿入方法
【課題】 被挿入物を挿入孔に軸心を揃えて挿入するに際して、種々の大きさの被挿入物に対応することができ、簡単な構造により、短時間に、作業能率よく挿入することができる被挿入物の把持・挿入装置を提供する。
【解決手段】 被挿入物を把持して挿入孔に軸心を揃えて挿入するために使用される被挿入物の把持・挿入装置60が、3本以上の把持指65を有し、これらの把持指65は、円周方向に間隔を置いて配置されて、放射方向に進退可能にされ、把持指65の内側面は、被挿入物を把持する把持面とされ、把持指65の外側面は、少なくともその先端部に先端に行くに従い内方に向かうテーパが付されて、挿入孔の入口に接触可能にされ、被挿入物把持・挿入装置60の位置を挿入孔の位置にならわせて修正するならい機構を備えている。
(もっと読む)
サスペンションアッセンブリ取り付け装置
【課題】設備にかかるコストを低減できるサスペンションアッセンブリ取り付け装置を提供すること。
【解決手段】マウントシステムは、複数機種に共通する締め付け箇所を締め付ける締付ロボットと、複数機種のそれぞれに固有の締め付け箇所を締め付ける固有箇所締付ユニット70Lと、を備え、締付ロボットは、アームと、このアームの先端に取り付けられたナットランナと、を備える。固有箇所締付ユニット70Lは、ナットランナ71と、ナットランナ71をサスペンションアッセンブリに対して進退させる進退機構72と、進退機構72を進退方向と交差する面に沿って移動可能に支持する移動機構73と、を備え、上述の締付ロボットは、この進退機構72を操作することにより、進退機構72を進退方向と交差する面に沿って移動させて、固有の締め付け箇所に固有箇所締付ユニット70Lのナットランナ71を対向させる。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】左右のキャンバ角の差分を極力低減しつつ、サスペンションアッセンブリをボディに取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】アッセンブリ取り付け方法は、ダンパ取付孔13L,13Rの位置BL,BRを測定し、ボディ10の中心位置BCを算出する手順と、サブフレーム基準穴26L,26Rの位置SL,SRを測定し、サスペンションアッセンブリ20の中心位置SCを算出する手順と、中心位置BCと中心位置SCとが一致するように、ボディ10にサスペンションアッセンブリ20を取り付ける手順とを備える。ボディ10にサスペンションアッセンブリ20を取り付ける手順では、サスペンションアッセンブリ20のサブフレーム21をボディ10に固定するとともに、ダンパアッセンブリ24L,24Rの上端側をダンパハウジング12L,12Rに固定する。
(もっと読む)
車両組立ラインにおけるドア搬送装置およびドア搬送方法
【課題】コンベヤの総設置距離を小さくしつつ、左右のドアの艤装組立作業を作業者が対面するかたちで行う際に、一方の作業者側でのハンガーの揺れ等が他方の作業者側での作業に影響しないドア搬送装置を提供する。
【解決手段】一次コンベヤ3と一対の二次コンベヤ4と備え、一次コンベヤ3の一次ハンガー5に各二次コンベヤ4の二次ハンガー16がそれぞれに吊り下げ支持可能となっている。特定の区間ではドアDを搭載した二次ハンガー16を二次コンベヤ4のガイドレール17から外して一次コンベヤ3によって搬送する。別の区間では各二次ハンガー16を一次ハンガー5から切り離し、それぞれの二次コンベヤ4で独立して搬送する。
(もっと読む)
ロボット生産システム
【課題】専用の治具やツールを用意する必要がなく、短時間で高精度の教示作業を完了することができ、正確な位置合わせが不要となされ、生産ラインへの設置作業が容易であり、生産ラインへ設置した状態と生産ラインから外した状態との間を配置変更自在とすることができるロボット生産システムを提供する。
【解決手段】搬送ロボット30が配設された配置変更自在な第1の作業テーブルT1と、第1の作業テーブルT1を設置した際にこの第1の作業テーブルT1の位置の所定位置に対する位置ずれ量を検出する位置ずれ検出手段となるカメラ33と、カメラ33による検出結果に基づいて搬送ロボット30の動作の基準となる教示データを補正する位置ずれ補正手段となる制御部51を備えた。
(もっと読む)
フローティングチャック装置及びフローティングチャックユニット
【課題】 簡易な構成でもってチャックのフローティングを可能としコンパクト化を図ることができるフローティングチャック装置及びフローティングチャックユニットを提供する。
【解決手段】 上下方向に延びる軸部21を有し、その先端の吸着部にワークを吸着させて該ワークWを保持するチャック20が、該チャック20を移動させる移動基板3に対してフローティング可能に支持されるフローティングチャック装置10又はこれが複数並設されたフローティングチャックユニット1において、チャック20にフランジ部22を設け、軸部21を挿通させるチャック挿通孔11cを有しフランジ部22を支持する第一ガイドブロック11と、該第一ガイドブロック11と対をなしフランジ部22を上方から挟み込む第二ガイドブロック12とを設け、第一ガイドブロック11とフランジ22との間、及びチャック挿通孔11cと軸部21との間にクリアランスn1、n2を形成する
(もっと読む)
ピアスナット打ち込み装置及びピアスナット打ち込みロボットシステム
【課題】ナット接合作業における生産性の向上を図る。
【解決手段】ピアスナットの取り付け対象となる薄板材料をカシメるためのカシメ金型と、ピアスナット及び薄板材料を挟んでカシメ金型に対向配置される対向部材と、カシメ金型及び対向部材を保持するフレーム13と、カシメ金型と対向部材の少なくともいずれか一方を他方側に押圧する駆動源となるサーボモータ17と、サーボモータに対してカシメ金型と対向部材の押圧往復動作を設定ストロークで行う動作制御を行うコントローラを備えている。
(もっと読む)
車体部品の位置決め装置、および、車体部品の位置決め方法
【課題】車体の仮付け時、車種に関らず車体部品の位置決めを高精度に行うと共に、かつ、位置決めに要する設備もしくはその保管スペースを低減することで設備投資の低廉化を図る。
【解決手段】ルーフパネル7および左右のサイドメンバ6の位置決めを行う位置決め装置は、車幅方向に移動可能な一対の第1当接部18と、車幅方向に移動可能な一対の第2当接部とを有する。第1当接部18と第2当接部は共に溶接縁部に形成される左右の溝部8にそれぞれ挿入可能であり、第1当接部18は、挿入した状態で共に車幅方向外側に移動することによりサイドメンバ6の内側面6aと当接すると共に、第2当接部は、挿入した状態で共に車幅方向内側に移動することによりルーフパネル7の外側面7aと当接する。これら第1当接部18間の離間距離W1と、第2当接部19間の離間距離は共に可変で、かつ対象車種に応じてそれぞれ所定の大きさに設定可能に制御される。
(もっと読む)
1 - 20 / 103
[ Back to top ]