
Fターム[3C269KK13]の内容
数値制御 (19,287) | システムの全体構成、動作 (627) | 複数対象の協調動作、同期動作 (87)
Fターム[3C269KK13]に分類される特許
1 - 20 / 87
少なくとも1つの共通の領域を含むそれぞれの作業スペースを有する少なくとも2台のロボットを制御する方法
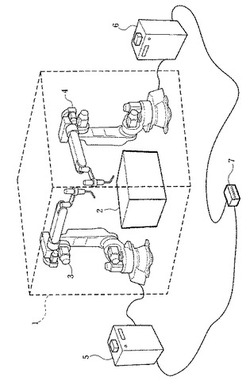
【課題】2台のロボットを制御する方法であって、共通作業領域におけるロボット間の干渉を防止する。
【解決手段】作業スペースは、存在する物体を考慮して単純な形状によって構成された、禁止干渉領域、監視干渉領域、ハイブリッド干渉領域に分類される干渉領域を規定することによってモデル化される。各ロボット3,4は、ハイブリッド干渉領域に進入するときに、進入予約の第1出力信号、および進入/存在の警告の第2出力信号を中央電子制御ユニット7に送信するように構成され、ハイブリッド干渉領域のステータスは、ハイブリッド干渉領域に他のロボット3,4が存在するか否かに応じて、ハイブリッド干渉領域をロボット3,4に対して監視または禁止された状態にするロボット3,4への入力信号を、中央電子制御ユニット7から送信することによって、ロボット3,4の動作中に、各ロボット3,4に対して動的に変更される。
(もっと読む)
ギア加工機の制御装置

【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム
【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
駆動軸共有装置および駆動軸共有方法
【課題】専用の制御装置を用いることなく、1つの共有駆動軸を複数の制御装置によって駆動制御することができ、構造が簡単であるとともに、低コストで実現することが可能な、駆動軸共有装置および駆動軸共有方法を提供する。
【解決手段】駆動軸共有装置10は、共有駆動軸20と、共有駆動軸20に連結され、共有駆動軸20を駆動する第1の駆動装置31および第2の駆動装置32とを備えている。第1の駆動装置31および第2の駆動装置32は、第1の制御装置40および第2の制御装置50によってそれぞれ制御される。第1の制御装置40は、第2の駆動装置32によって共有駆動軸20が駆動されていないとき、第1の駆動装置31により共有駆動軸20を排他的に駆動する。第2の制御装置50は、第1の駆動装置31によって共有駆動軸20が駆動されていないとき、第2の駆動装置32により共有駆動軸20を排他的に駆動する。
(もっと読む)
テーブル形式データによる運転機能を備えた数値制御装置
【課題】動作時間が不定な補助機能を実行することによってサイクルタイムが延びることを防止することが可能なテーブル形式データによる運転機能を備えた数値制御装置を提供すること。
【解決手段】自己のパステーブルの基準となる値Lを読み(SA01)、自己のパステーブルから基準となる値Lに近い次の指令基準値のデータを読み出し(SA02)、自己のパステーブルに指令基準値があるか否か判断し(SA03)、指令基準値がある場合には、基準となる値Lが指令基準値に到達したか否か判断し(SA04)、到達した場合には、他のパステーブルとの待ち合せ指令があるか否か判断し(SA05)、ある場合には基準となる値Lのカウントを停止し(SA06)、他のパステーブルとの待ち合わせは完了したか否か判断し(SA07)、完了した場合には基準となる値Lのカウントの停止を解除し(SA08)、他のパステーブルとの待ち合わせがない場合とともに指令を実行する(SA09)。
(もっと読む)
ロボットシステムの教示データ作成方法及びロボットシステムでの溶接方法
【課題】断続溶接を確実に行うことができると共に、溶接作業時間を可及的に短くすることのできるオフライン教示データの作成方法を提供する。
【解決手段】本発明に係るロボットシステム1のオフライン教示データの作成方法は、断続溶接の溶接予定線に沿って設定されている溶接区間及び非溶接区間の順番及び区間長さ比を、溶接予定線を溶接する際にスライダ7が移動するスライダ移動線に適用することで、当該スライダ移動線上に、溶接区間に対応する第1スライダ移動区間と、非溶接区間に対応する第2スライダ移動区間とを設定しておき、少なくとも1つ以上の溶接区間での溶接が終わった際に、スライダ7が当該溶接区間に対応する第1スライダ移動区間に隣接する第2スライダ移動区間内に位置するように、教示データを作成する。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
工作機械用制御装置
【課題】工作機械を試験する前に作業者に加工プログラムの実行順を入力させる作業負担を回避して簡便に加工プログラムのデバッグを実現する工作機械用制御装置を提供すること。
【解決手段】系統番号1、2の小さい順に加工プログラムブロックS1−1、S1−2、S2−1、S2−2の待ち合わせ指令da1−1、da1−2、da2−1、da2−2まで複数の加工プログラムS1、S2を直列に実行するとともに複数の加工プログラムS1、S2相互で加工プログラムブロックS1−1、S1−2、S2−1、S2−2を並列に実行しない工作機械用制御装置100。
(もっと読む)
ロボットプログラミング装置および方法
【課題】ロボットの任意の停止状態から所望の動作を実行させる際に工程を選択できるようにプログラミングを行うロボットプログラミング装置等を提供する。
【解決手段】ロボットを使用した組み立てセルのロボットが行う独立した作業を単位とした作業ブロックを実行順に接続して工程フローを作成し、工程フローからロボットプログラムを生成する装置であり、停止ブロック検出手段で検出された停止ブロックと、表示手段に表示した停止ブロックを考慮した外部入力に従って実行ブロック指定手段から得た停止状態から実行する実行ブロックとの位置情報とハンド状態とセンサ状態をそれぞれ比較し、停止ブロックの停止状態を起点として実行ブロックを実行するための一時実行プログラムおよび一時実行作業指示を生成し、表示手段に一時実行作業指示を表示すると共に、入出力手段から一時実行プログラムを出力する工程再構築手段を備えた。
(もっと読む)
数値制御工作機械
【課題】 NC制御軸であるZ軸(第1軸移動体)に対して同期制御されないX軸(第2軸移動体)を備えた数値制御工作機械において、Z軸のサーボ遅れに伴う加工形状誤差を解消し、加工精度を高める。
【解決手段】 ワーク10をテーブル11に保持し、テーブル11のX軸位置をX軸駆動機構12により制御する。砥石20を砥石主軸頭21に支持し、砥石主軸頭21のZ軸位置をZ軸サーボ機構22により制御する。クラウニングデータ記憶部5は、テーブル11のX軸位置に対応する砥石主軸頭21のZ軸位置を定義した加工形状データを記憶する。X軸仮想位置演算部6は、Z軸のサーボ加減速時間中におけるテーブル11の移動距離を算出し、この移動距離をテーブル11の現在位置に加算した地点にX軸仮想位置を求める。クラウニング制御部4は、X軸仮想位置に対応する砥石主軸頭21のZ軸位置を加工形状データより求め、Z軸補間演算部3を介してZ軸サーボ機構22に提供する。
(もっと読む)
干渉チェック装置及びプログラム
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
ロボットおよび補間方法
【課題】ロボットを構成する2つの制御ユニットA,Bにおいて、制御ユニットBが制御ユニットA上に設置されている場合に、両方の制御ユニットを同時に動かしながら、制御ユニットBの制御点に対して所望の補間動作ができるようにする。
【解決手段】制御ユニットBのユニットコントローラBに対して、制御ユニットAの制御点ACに対する指令Aも与える。ユニットコントローラBは、指令Aを制御周期ごとに補間計算し、制御ユニットBのユニット座標系Bにおける制御点BCの補間位置を計算することで、制御ユニットBのアクチュエータの補間位置を計算し、アクチュエータを制御するという手順で処理する。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
同期制御装置
【課題】 同期位置信号に基づいてスレーブ軸を制御する同期制御装置において、スレーブ軸をマスタ軸の動作に同期するように制御する定常動作時から機械を強制停止させる場合、強制停止時用の動作プログラムを用いることなく、マスタ軸とスレーブ軸の同期は解除し、かつ、スレーブ軸同士の同期を維持したまま機械を停止させることができる同期制御装置を得る。
【解決手段】 機械の定常動作時は、マスタ軸位置信号を同期位置信号とすることで、スレーブ軸をマスタ軸の動作に同期するように制御し、強制停止動作時は、マスタ軸位置信号の値から求めた位置及び速度をそれぞれ初期位置及び初期速度とする基準位置信号を生成し、基準位置信号を同期位置信号とすることで、スレーブ軸を基準位置信号に同期動作して停止するように制御する。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
1 - 20 / 87
[ Back to top ]