
Fターム[3C269PP08]の内容
数値制御 (19,287) | 安全手段、異常対策、保護 (667) | 異常、故障を避けるための処置 (119)
Fターム[3C269PP08]の下位に属するFターム
暗号、暗証番号の利用 (21)
冗長化 (19)
Fターム[3C269PP08]に分類される特許
1 - 20 / 79
工作機械
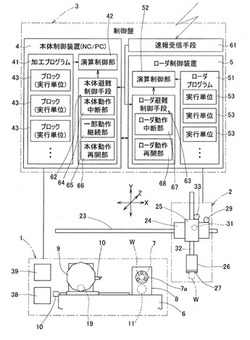
【課題】 地震による損傷を防止すると共に、緊急地震速報が誤報であった場合にも、作業者よる加工再開の操作を必要とせずに加工が再開できて、加工精度が低下することを抑えることができ、かつワークに加工中断の痕跡を残すことがないようにする。
【解決手段】 本体制御装置4に、速報受信手段61による緊急地震速報の受信に応答して、工作機械本体1に一連の避難動作を行わせる本体避難制御手段62を設ける。この手段62は、現在実行中の実行単位43の終了後に加工プログラム41の実行を中断し、工作機械本体1に退避動作を行わせる本体動作中断部62を有する。また、前記中断の後、定められた経過時間後に、工作機械本体1を退避動作前の状態に戻すと共に、加工プログラム41の実行を再開させる本体動作再開部66を有する。
(もっと読む)
速度監視装置

【課題】低い分解能の位置センサが使用でき、かつ誤検出せずに高速応答可能な速度監視装置を提供する。
【解決手段】速度監視装置は、記憶手段に、許容移動マージンPMと、1周期期間で許容される前記可動部の最大移動距離である比較速度量VCと、現在の時刻tからM周期前までにおける前記可動部の位置データP(t−nT)(nは、M以下の自然数)と、を記憶しておく。速度判定の際は、1からMまでのすべての整数nに対して、|P(t)−P(t−nT)|>VC*n+PMの成否を判定し(STEP6)、当該不等式が成立した場合には、速度超過と判定する(STEP20)。
(もっと読む)
ロボット、ロボットの動作表示制御方法
【課題】操作者の安全性を高めるロボットを実現する。
【解決手段】ロボット200は、ロボットアーム220と、ロボットアーム220の動作を制御する制御部240と、アーム先端部226に配置され、且つ現在時刻のアーム先端部226の位置・姿勢から、制御部240によって生成されたアーム先端部226の軌道に基づき、現在時刻から次時刻におけるアーム先端部226の移動方向及び移動速度を表示する動作表示部100と、を備えている。動作表示部100は、表示画素101の集合であって、表示画素101をアーム先端部226の移動方向に沿って点灯または点滅させる。このことによって、操作者はアーム先端部226の移動方向・移動速度を認識することができる。
(もっと読む)
侵入検出装置,ロボット,侵入検出方法および侵入検出プログラム
【課題】特定領域への侵入を遅延無く検出する。
【解決手段】侵入検出装置は,侵入検出装置は,侵入を検出する境界に沿って前記境界に近接して配列された複数の光マークからなる光マーク列と,光らせる前記光マークを時刻によって異らせる制御信号であって,任意の時刻において,前記光マーク列の一部に対応する前記制御信号の一部は,前記光マーク列の他の一部に対応する前記制御信号の他の一部の誤り検出符号である前記制御信号を生成する点滅制御部と,前記光マーク列からの光を受光し前記光に応じた信号を出力する光センサーと,前記光センサーが出力する信号を前記光マーク毎に二値化した受光信号を生成し,前記光マーク列の他の一部に対応する前記受光信号の第一部分に基づいて前記誤り検出符号の検査値を生成し,前記光マーク列の一部に対応する前記受光信号の第二部分と前記検査値とを比較した結果に基づいて前記侵入を検出する検出部と,を備える。
(もっと読む)
ロボットシステム
【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
エアバランスを利用して退避動作を行う位置決め装置
【課題】外部の動力に依存することなく、新たな制御回路を追加することもなく、ブレーキが動作する条件で、確実に垂直軸に退避動作をさせることができる位置決め装置を提供すること。
【解決手段】固定部20に対して可動部21が鉛直方向に対して上下に移動する構造であり、圧力調整装置46はエア源(コンプレッサ)44に接続され、圧縮空気がエア配管60を介してエア源44から圧力調整装置46に供給され、圧力調整装置46に供給された圧縮空気はエアバランスの配管80を介してエアバランスに供給され、制御装置40からの圧力調整を指令する電気信号が圧力調整の信号線80を経由して圧力調整装置46に入力し、圧力調整装置46の動作が制御され、非常停止スイッチ42は手動で緊急停止させるためのスイッチであり、これが押されると制御装置40の制御が切れて非常停止状態となる。
(もっと読む)
切削加工経路創成装置及び方法並びにプログラム
【課題】干渉を回避しつつ、加工にかかる時間を短縮すること。
【解決手段】ワークをカッタにより加工する加工工程と加工終了後にカッタを加工開始位置まで移動させる工程とを繰り返し、ワークを加工する工作機械に適用される切削加工経路創成装置10であって、ワークの位置を基準とするワーク座標系において、加工工程におけるカッタの形状を示すカッタ形状データの位置を推定するカッタ位置推定部21と、推定されたカッタ形状データとワークの形状を示すワーク形状データとに交点がある場合には、交点の情報に基づいて、加工工程終了後のワーク形状データを新たなワーク形状データとして更新するワーク形状更新部22と、カッタを次の加工開始位置に移動させる場合にワーク形状更新部22によって更新された新たなワーク形状データとワーク座標系における移動時のカッタ形状データとの干渉可能性を判定する干渉判定部23とを具備する。
(もっと読む)
工作機械の移設検出装置
【課題】当初の設置場所からの不適切な移設による機械の精度低下、機能低下、寿命低下などを防止すると共に、機械の移設先や移設履歴を知ることもできる工作機械の移設検出装置を提供する。
【解決手段】工作機械又はNC装置のフレームに掛かる荷重の変化を、フレームの歪の変化として検出する歪検出手段と、検出した歪の変化量が、予め定められたしきい値を超えた場合に工作機械の移設が行われた旨の移設判定を行う判定手段と、移設判定を記憶する記憶手段と、NC装置に工作機械の起動指令が与えられた時に前記記憶手段の内容を読取ることができない場合又は記憶手段が移設判定を記憶している場合に、NC装置に動作制限信号を出力する制限情報出力手段と、動作制限信号に基づく動作制限を解除するためのリセット信号を出力すると共に記憶手段の記憶内容を初期化するリセット手段とを備えている。
(もっと読む)
異常時モータ減速停止制御機能を有する制御装置
【課題】数値制御部およびモータ制御部の異常を検出する異常検出部を備え、前記数値制御部および前記モータ制御部のいずれにおいて異常が発生しても、前記異常検出部からの信号を受けて、減速停止専用モータ制御部に設けられたモータ減速停止制御部によりモータを減速停止させることが可能な異常時モータ減速停止制御機能を有する制御装置を提供すること。
【解決手段】機械50を制御する数値制御装置10は、移動指令を出力する数値制御部11と、数値制御部11からの移動指令に基づいてモータ40を駆動する指令を出力するモータ制御部12とを備え、アンプ20は、モータ制御部12からの指令に基づいてモータ40を駆動するモータ駆動用のアンプであって、異常検出部13は数値制御部11またはモータ制御部12の異常を検出し、モータ減速停止制御部15は異常検出部13からの異常検出信号を受けてモータ40を減速停止させる異常時モータ減速停止制御機能を備えた制御装置。
(もっと読む)
工作機械及びその加工制御装置
【課題】安定限界曲線に基づいて設定された条件で切削加工を行う工作機械において、加工中に発生したびびり振動を、容易にかつ安定して抑える。
【解決手段】この加工制御装置は、記憶部7と、演算部8と、振動検出センサ5と、を備えている。記憶部7は、主軸回転数に対してびびり振動が抑制される限界切込み量を示す安定限界曲線のデータが格納されている。演算部8は、安定限界曲線データに基づいて加工開始時の主軸回転数及び工具切込み量を設定し、振動検出センサ5の検出結果によりびびり振動が発生したか否かを判定し、びびり振動が発生した場合に、安定限界曲線データを参照してびびり振動が抑制されるように主軸回転数を制御する。
(もっと読む)
数値制御装置
【課題】軸ごとの電力を正確に算出する数値制御装置を提供する。
【解決手段】コンバータ部110の出力電力を取得するコンバータ電力取得手段300と、モータ13−1〜13−Nの出力を軸ごとに算出するモータ出力算出手段310と、コンバータ出力電力とモータ出力の全軸に関する総和との差を全損失として算出する全損失算出手段340と、モータの損失を軸ごとに算出するモータ損失算出手段320と、アンプの損失を軸ごとに算出するアンプ損失算出手段330と、モータ損失とアンプ損失との和を軸損失として軸ごとに算出する軸損失算出手段350と、軸損失の全軸に関する総和に対する、軸毎の軸損失の比率に基づいて、全損失を軸毎に分配した損失を軸ごとに求める損失分配手段360と、モータ出力と分配軸損失との和を軸電力として軸ごとに求める軸電力算出手段370とを備える。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
振動抑制機能を備えた数値制御装置
【課題】さまざまな指令回転速度において、記録された最適回転速度への置換えを可能とする。
【解決手段】数値制御装置は、加工プログラムから回転軸の指令回転速度を抽出するプログラム解析部19と、びびり振動を抑制可能な複数個の最適回転速度が記録され
る最適回転速度記録部16と、抽出された指令回転速度に応じて、前記複数個の最適回転速度の中から一つの最適回転速度を選択して、実際の加工で用いる指令回転速度
とする指令回転速度置換え判定部17と、を備える。指令回転速度置換え判定部は、抽出された指令回転速度に基づいて、置換え可能な最適回転速度の範囲である置換回
転速度範囲を求め、前記複数個の最適回転速度のうち当該置換回転速度範囲内にある最適回転速度を、実際の加工で用いる指令回転速度として選択する。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
工作機械の振動抑制装置及び方法
【課題】加工完了までの所要時間を変更したり、過度の加工条件変更によるびびり振動の増加を招いたりすることなく、発生したびびり振動に対して適切に対処する。
【解決手段】S2で各パラメータに基づいて上限回転速度を設定して加工を開始し(S3)、びびり振動の発生を検出してびびり振動の種類を判別し(S4,S5)、検出されたびびり振動が強制びびり振動であれば、そのときの回転速度と振動量とを記憶して(S7)回転速度を上昇側へ変更する(S8)一方、回転速度を上昇側へ変更しても振動が拡大傾向にある場合(S10)、若しくは上昇側へ変更しようとする次の回転速度が上限回転速度を超える場合(S13)には、回転速度を上昇側へ変更することなく、記憶された回転速度から振動量が最小となる回転速度を選択する(S11)。
(もっと読む)
工作機械
【課題】たとえ経験の浅い作業者等であっても、びびり振動を抑制しやすく、ひいては歩留まりの向上等を図ることができる工作機械を提供する。
【解決手段】びびり振動が発生した際に所定のパラメータを変更することで、変更後のパラメータの値に応じた振幅Q及び周期Rで主軸2の回転速度を変動させるものにおいて、そのパラメータに係る情報をパラメータ表示制御部11が表示手段9へ表示する。したがって、作業者は表示手段9における表示を参考にしてパラメータを変更し、主軸2の回転速度の振幅Q及び周期Rを変更することができる。そのため、経験の浅い作業者であっても、従来より容易にびびり振動を抑制させることができ、ひいては歩留まりの向上も図ることができる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
数値制御装置
【課題】測定対象物の計測作業をより簡易にでき得る数値制御装置を提供する。
【解決手段】3Dモデルを用いて干渉を検知する機能を有する数値制御装置は、その3Dモデルの位置情報が正確か否かの情報が属性情報として付与された構造体および移動体の3Dモデルに基づいて、これら3Dモデルの位置を演算する数値制御装置のシミュレーション部4'と、数値制御指令に基づいて、機械およびシミュレーション部を駆動するNC
装置部2'と、を備える。NC装置部2'は、前記3Dモデルの重なりが検知された場合に、当該重なりが生じた3Dモデルの位置情報が正確か否かを判断し、位置情報が正確と判断した場合は前記数値制御指令の実行中止を機械3およびシミュレーション部4'に指示し、前記位置情報が正確でないと判断した場合は警告を出力しつつ前記数値制御指令の実行続行を機械3およびシミュレーション部4'に指示する。
(もっと読む)
工作機械における振動抑制方法及び振動抑制装置
【課題】算出した安定回転速度の中から、動特性を変化させたりしない最適な安定回転速度を選択することができ、びびり振動を確実に抑制することができる振動抑制方法及び振動抑制装置を提供する。
【解決手段】主軸3の最高回転速度及び主軸3系の動特性が変わる切替回転速度を記憶しており、算出された複数の安定回転速度のうち、最高回転速度以下であり、且つ、回転速度の変更時に切替回転速度を跨ぐことのない安定回転速度を最適回転速度として選択し、主軸3の回転速度を該最適回転速度へと変更する。したがって、出力し得ない回転速度が選択されたり、主軸3系の動特性が変わってしまい「びびり振動」を抑制できないような回転速度へと変更するような事態を防止することができ、「びびり振動」を従来よりも確実に抑制することができる。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、3次元空間を2次元平面上に投影し、2次元平面をn1×n2のマス目に区切るマス目管理部424と、障害物対応マス目を特定し障害物占有情報で初期化するメモリ領域初期化部425と、ロボット対応マス目を特定しロボット占有情報を記録する占有情報記録部426と、ロボット占有情報と干渉条件情報間の論理積を求め、論理積の全ての桁が「0」なら「干渉無し」と、少なくとも一つの桁が「1」なら「干渉有り」と判断する判断部427を備える。ロボット対応マス目のメモリ領域に障害物占有情報が記録されている場合に、障害物占有情報と識別番号間の論理和がロボット占有情報となる。
(もっと読む)
1 - 20 / 79
[ Back to top ]