
Fターム[3C269QE15]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 文字、数字、記号を用いて表示するもの (384) | 寸法、座標値を表示 (109)
Fターム[3C269QE15]の下位に属するFターム
作業等の実行時、模擬実行時の現在値 (14)
図形に付加して表示 (26)
Fターム[3C269QE15]に分類される特許
21 - 40 / 69
パソコン機能を有する数値制御装置

【課題】パソコンのオペレーティングシステムが起動しない場合でも、数値制御装置の画面を表示する。
【解決手段】パソコン100に接続された記憶装置は、領域1に汎用OSと表示アプリを、領域2に保守用OSと数値制御装置の画面を表示する表示アプリを格納する。(1)数値制御装置200は、パソコン100を起動する信号をパソコン100に送る。(2)パソコン100は、保守用OSを起動し、従来通りに汎用OSを起動する。(3)汎用OSが起動した場合、数値制御装置200に起動完了を通知し、表示アプリを実行する。(4)パソコン100からの起動完了の通知が無い場合、数値制御装置200は、パソコン100をリセットし再起動する。(5)数値制御装置200は、保守用OSで画面を表示するための起動信号をパソコン100に送信する。(6)パソコン100は再起動後、保守用OSを起動し、保守用表示アプリを実行してCNC画面を表示する。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム

【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
ピックアンドプレース機構のコントローラ
【課題】 動作実行プログラムを手動で作成することを不要にする。
【解決手段】 コントローラCは、ピックアンドプレース機構Aのコマンド等が入力可能な指令入力部201と、動作時に動作プログラム122を読み出して動作実行プログラム124に変換し同機構Aを動作させる制御部111とを備える。特に制御部111は、動作指令プログラム123がコマンド毎に予め用意され、動作プログラム122を動作実行プログラム124に変換するに当たり、動作プログラム122に含まれる動作指令に係るコマンドに対応する動作指令用プログラム123を読み出し、その後、動作指令用プログラム123に含まれた初期設定の内容を当該動作指令に係る設定に更新し、この処理を動作プログラム122に含まれる動作指令毎に行ない、動作指令用プログラム123を動作指令の入力順に繋ぎ合わせて動作実行プログラム124として取り扱う。
(もっと読む)
切削装置、切削方法、プログラムおよびコンピューター読み取り可能な記録媒体
【課題】簡単な切削を手軽に行うことができるようにした。
【解決手段】ツールと被加工物との相対的な位置関係を3次元で変化するとともにツールにより被加工物に対して切削加工を行う切削装置において、予め定められた複数の切削加工から所定の切削加工を設定する第1設定手段と、予め定められた複数の切削加工領域の形状から所定の設定する第2設定手段と、第2設定手段により設定された切削加工領域の形状の切削加工位置を設定する第3設定手段と、切削加工に使用するツールを設定する第4設定手段と、切削加工によって切削処理される被加工物の材料を設定する第5設定手段と、第1設定手段と第4設定手段と第5設定手段とによる設定に基づいて切削条件を算出して設定する第6設定手段と、第1乃至第6設定手段よる設定に基づいて切削データを生成する生成手段とを有し、生成手段により生成された切削データに基づいて切削加工を行うようにしたものである。
(もっと読む)
数値制御装置
【課題】ショートカット機能の使い勝手を向上させて、パラメータの閲覧又は編集を能率的に行う。
【解決手段】登録ショートカット情報に動作情報が設定されている場合(S12;Yes)、CPUは工作機械の動作情報を取得し、取得した動作情報に基づいて登録ショートカット情報を書き換える(S13)。登録ショートカット情報に直前操作画面情報が設定されている場合(S14;Yes)、CPUは、直前操作画面情報を取得し、取得した直前操作画面情報に基づき登録ショートカット情報を書き換える(S15)。S16においてCPUは、ショートカット先の画面の付属情報を取得し、取得した付属情報に基づき登録ショートカット情報を書き換える。S19においてCPUは、ショートカット先の画面の画面遷移情報を登録ショートカット情報に置き換え、置き換えられた画面遷移情報に基づいて画面を表示すると共に、ショートカット画面を消去する。
(もっと読む)
機械加工シミュレーションを最適化するためのシステム及び方法
本発明の実施の形態は、工作物のボリュームから、掃引されたボリュームのセットを除去することによって実施される工作物の機械加工のシミュレーションを最適化する方法で、ボリュームはセルのセットに分割され、各セルにこのセルと交差する掃引されたボリュームのサブセットを表す距離フィールドのサブセットを関連付けるステップであって、掃引されたボリュームのサブセットの少なくとも一部はセルの複合サーフェイスを形成する関連付けるステップと、セルに少なくとも1つの方向からこのセルに入射する光線のセットを当てるステップと、距離フィールドのサブセットの或る距離フィールドを選択して、セルと関連付けられた最適サブセットに含めるステップであって、距離フィールドによって表される掃引されたボリュームの境界は、複合サーフェイス上に位置する交点において少なくとも1つの光線と交差する選択して含めるステップとを含む方法である。 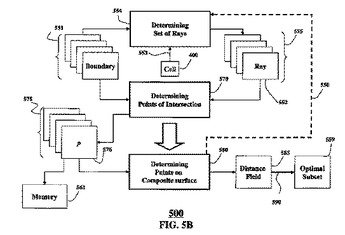 (もっと読む)
(もっと読む)
表示装置、表示方法、プログラム、仮想機構ライブラリ、およびコンピュータ読み取り可能な記録媒体
【課題】制御対象装置ごとに外観を忠実に再現した3次元モデルを用意することなく、ユーザに制御対象装置の動きを理解させることが可能な表示装置を提供する。
【解決手段】PCは、仮想機構の選択肢を提示し、その選択を受け付ける。仮想機構は、複数の機構要素が連動関係をもって組み合わせられており、特定の制御対象装置の形態の模倣ではない抽象化された形態を備えている。仮想機構の選択肢には、機構要素の種類または機構要素同士の連動関係の態様が互いに異なる複数の仮想機構が含まれる。PCは、制御プログラムの実行結果である一連の位置の指令値または実測値を用いて、制御対象装置に指令値が入力される周期毎またはその周期のうち指定された周期における、選択された仮想機構の状態を示した動画を画面に表示する。
(もっと読む)
工作機械の誤差表示装置
【課題】直進軸と回転軸を有する工作機械を対象とした場合に、NCデータによる理想的な工作機械の動作に対する実際の工作機械の動作の誤差を把握することができる工作機械の誤差表示装置を提供する。
【解決手段】NCデータに基づいて工作機械1の直進軸および回転軸を運転した場合の直進軸および回転軸に関する機械座標系の軸位置測定データを取得する。直進軸および回転軸の機械座標系の軸位置測定データと機械情報とに基づいて座標変換をして、ワーク座標系における工具の測定加工点移動軌跡を算出する。NCデータに基づいてワーク座標系における工具の基準加工点移動軌跡を表示画面に表示すると共に、測定加工点移動軌跡を基準加工点移動軌跡に重ねて表示画面に表示して、基準加工点移動軌跡に対する測定加工点移動軌跡の誤差を表示画面に表示する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
研削加工ワークの補正研削加工方法
【課題】被研削加工ワークの補正研削加工時間を短縮でき、かつ、寸法精度の優れる加工ワークを与える。
【解決手段】機上画像計測システムおよびエアブローを備えたNC研削装置を用いて、ワークの測定基準位置と公差を数値制御装置に入力した後に砥石によるワークの研削加工を開始し、ついで、研削加工を終了させて得られた研削加工ワークにエアブローしながら公差を測定し、補正研削加工プログラムを作成した後、補正研削加工を行う。
(もっと読む)
板材加工機のワークホルダ段取り情報表示装置
【課題】 スケジュール運転において、ワークホルダの段取りがあることを作業者に事前に知らせることができる段取り情報表示装置を提供する。
【解決手段】 ワークホルダ13の移動部材13に対する現在の取付位置を記憶するワールホルダ取付位置記憶手段69を設ける。加工スケジュールSHの加工プログラムを先読みし、記述されたワークホルダ13の取付位置の情報を抽出して、上記記憶手段69の情報と比較し、ワークホルダ取付位置の変更が必要となることを示す情報を生成する段取り情報生成手段48を設ける。その情報を表示情報生成手段71により表示装置47に表示させる。
(もっと読む)
工作機械
【課題】
回転テーブルの振動を検出するための振動センサを新たに設ける必要が無く、回転テーブルに回転アンバランスが生じた場合に生じる回転テーブルの振動を正確に検出することができる工作機械を提供する。
【解決手段】
回転テーブル30は回転アンバランスが生ずると、回転速度とアンバランス量に応じて振動する。このときの振動はボールネジ16を介して、X軸方向の位置ドループの変動として現れる。回転テーブル30の遠心力と、回転テーブル30の振動時の振幅の間には、相関があり、前記遠心力とX軸方向の位置ドループにも相関がある。すなわち、前記振幅とX軸方向の位置ドループには相関があり、X軸方向の位置ドループの変動量を主制御部110が監視し、回転テーブル30の振動を検出する。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
NCプログラムの解析編集装置、方法、プログラム、および記憶媒体
【課題】編集作業を容易にする。
【解決手段】本装置を、NCプログラム21を編集画面71に編集可能に表示するNCプログラム編集手段41と、概要情報を抽出し概要情報画面72に表示する概要情報編集手段43と、切削加工情報を抽出する切削加工情報抽出手段45と、CADデータ23から形状情報を抽出する形状情報抽出手段47と、切削加工情報、または形状情報の少なくとも一つの情報に基づき、工具軌跡データ層51、穴明図データ層52、またはワーク図データ層53を生成するとともに、描画画面73に重ね合わせ可能に描画表示する図形描画手段49と、切削加工情報をリスト画面74に表示する切削加工情報表示手段55と、表示領域をそれぞれ連動表示させる連動表示手段57と、ミル加工または穴明加工について解析し、対応する画面に表示させる切削加工解析手段59と、を備えるように構成する。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
加工ユニットの動作を表示し、ユーザ入力から処理データを生成する仮想工作機械
作業スペース(30)及びこの作業スペースに配置された加工ユニット(36)を有する工作機械の制御システムの処理を容易にするため、制御システムは、処理データ及び記憶された機械モデル(48)に基づき、少なくとも作業スペース(30)の領域内において、可視化要素(G,FF)によって可視化ユニット(50)上で、仮想作業スペース(54)内に設けられた仮想加工ユニット(56)を有する仮想工作機械として実際の工作機械(12)を表示すると共に、仮想加工ユニットの機能を仮想機能として表示する可視化コントローラ(36)を備える。マニュアル対話処理を可能とする対話処理ユニット(80)は可視化ユニット(50)と関連付けされ、マニュアル対話処理によって工作機械の機能の関連性を可能とする機能選択ユニット(90)が可視化ユニット(50)と関連付けされ、関連した機能を考慮しながら、マニュアル対話処理に対応する処理データ(ML,MST)を生成すると共に、可視化要素(G,FF)を使用しながら、可視化ユニット(50)上で、マニュアル対話処理によって特定された機能を表示するために、処理データ(ML,MST)を可視化コントローラ(40)に対して転送する処理データ(ML,MST)を生成する機能データ生成ユニット(92)を備える。 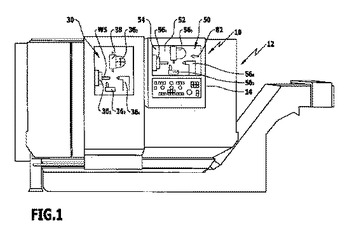 (もっと読む)
(もっと読む)
スポット溶接の打点位置電子化装置、スポット溶接の打点位置電子化方法、及びスポット溶接の打点位置電子化プログラム
【課題】
部品の設計図面に記載された打点の座標を記憶手段に記録する際の手間、読取り誤認、数値の誤入力を解消することができるスポット溶接の打点位置電子化装置、スポット溶接の打点位置電子化方法、及びスポット溶接の打点位置電子化プログラムを提供する。
【解決手段】
S4で部品画像を表示装置で表示し、S8,S12において、表示された部品画像の異なる2つの基準点をマウスにより指定する。S16,S18においてマウスにて指定された部品画像における各基準点の実際の二次元の座標値をキーボードにより入力する。S20では部品画像上の打点をマウスにより指定する。S22ではマウスにて指定された打点の実際の二次元の座標値を、前記指定された2つの基準点と、キーボードにて入力された基準点の実際の座標値に基づいてCPUが演算する。S26では演算された打点の実際の二次元の座標値を記憶装置により記憶する。
(もっと読む)
ロボットオフラインプログラミング装置
【課題】実機と同じ動作をするシミュレーションが可能なオフラインプログラミング装置を提供する。
【解決手段】ロボットオフラインプログラミング装置28は、NCシミュレータ10の第1通信モジュール26と通信回線24により接続され、第1通信モジュール26と信号等の情報の通信を行う第2通信モジュール30と、前記情報に基づいてロボットのシミュレーションを行うロボットシミュレーション装置すなわちロボットシミュレータ32と、ロボットシミュレータ32でのシミュレーション結果を用いてオフラインで教示プログラムを作成するプログラム作成装置34とを有する。ロボットシミュレータ32には、シミュレーション対象についての3次元CADモデルや仕様を表すデータが格納される。
(もっと読む)
原点サーチ支援装置及びプログラム
【課題】 制御装置がどのように原点サーチ動作を実行するのか、実際に動作させることがなく知ることができ、マニュアルを参照する手間や実際に動作させ検証する時間を短縮でき、原点サーチ関連パラメータ設定の時間短縮を図ること
【解決手段】 原点サーチをする際の基本的な動作並びに原点の特定条件を規定する「原点サーチ動作」と、原点サーチ開始時の移動方向を規定する「原点サーチ開始方向」と、原点を特定する際の移動方向を規定する「原点入力検出方向」等を入力パラメータとし、各入力パラメータの設定値に対応するパルス列からなる複数の仮想入力信号(原点近傍信号,原点信号等)に基づき、その仮想入力信号のON/OFFの切り替えタイミングにあわせて設定値に合わせた動作を行い、開始地点Sから原点Gまでの移動軌跡を求め、その移動軌跡(横軸:位置,縦軸:移動速度のグラフ)を表示装置に表示する。
(もっと読む)
回転角度判定システム
【課題】NC工作機械の信頼性をあげることができる回転角度判定システムを提供する。
【解決手段】回転角度判定システムSは、NC機械の機械制御部200と、NC機械角度検出部20に設けられている角度検出用のロータリスケール22と同軸に設置されたロータリスケール180と、ロータリスケール180の計測信号を角度値に変換する並列系統シーケンサ部185と、並列系統シーケンサ部185からの角度値と、ワークの加工情報に基づき算出した角度値の合致判定を行う回転角度判定装置100とを備える。回転角度判定装置100は、機械制御部200から回転角度判定要求を受理すると、並列系統シーケンサ部185から角度値を受信し、受信した角度値と、予め算出した角度値との角度差が、加工情報で与えられている公差以内であるか否かを判定し、判定結果を機械制御部200に送信することを特徴とする。
(もっと読む)
21 - 40 / 69
[ Back to top ]