
Fターム[3C269SA04]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 制御対象を直接動かして教示するもの (162) | 教示用手動操作手段を用いるもの (105)
Fターム[3C269SA04]の下位に属するFターム
制御対象の作業部近傍に設けられた (3)
Fターム[3C269SA04]に分類される特許
21 - 40 / 102
ロボット教示データの算出方法およびロボットのコントローラ
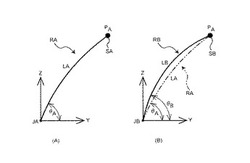
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
指接触により動作教示可能となる動作教示装置

【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
基準面を設定して狙い角等のトーチ姿勢を数値で教示あるいは表示するアーク溶接ロボット制御装置では、溶接線を規定する教示点の位置を修正したときに、基準面を算出するための補助点も修正する必要がある。
【解決手段】
ロボット制御装置RCは、溶接線を規定する各教示点と、基準面を算出するための補助点とを、対にして記憶する記憶部を備える。ロボット制御装置RCは、溶接線上の教示点の位置変更があったとき、位置変更があった教示点と対の関係にある補助点を、前記位置変更があった教示点の修正分を補正して自動算出するCPUを備える。本来の溶接線の教示修正結果に応じて基準面を算出するための補助点も自動修正されるので、教示修正時間を大幅に短縮できる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット制御システム
【課題】予め定められた座標系でジョグ送りする場合は複数のキーの組合せ操作が必要なため操作が煩雑になる。
【解決手段】ツールの移動方向を定める方向指示キー41Aを備え、指示された移動方向および手動操作座標系に基づき、ツールをジョグ送りするロボット制御システム10である。ジョグ送り操作時に、手動操作座標系を構成する座標軸のうち1つを選択する。次に座標軸の回転角度を設定する。そして、手動操作座標系を座標軸中心に回転させ、回転後の手動操作座標系に従ってツールをジョグ送りする。上記回転角度は、ジョグダイヤル42によって設定しても良い。また、方向指示キー41のいずれか1つを押下したまま、ジョグダイヤル42によってリアルタイムに座標系を回転させながらアナログ感覚でジョグ送りすることもできる。軸方向をいつでも変更可能とすることによりジョグ送り操作時の煩雑さを解消する。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
6軸ロボットの4軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの5軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて4軸の原点位置を適切に較正できる6軸ロボットの4軸原点位置較正方法を提供する。
【解決手段】垂直多関節型の6軸ロボットについて、6軸の軸心の延長線上に計測点を定めるための計測補助具を取り付け、5軸を4軸の軸心の延長線から所定の角度θ5_1だけ回転させて計測点を第1計測位置に移動させ(S1)、第1計測位置をレーザー変位計により計測すると(S2)、5軸を、4軸の軸心の延長線から上記の回転方向とは逆方向に角度θだけ回転させる(S3)。次に、少なくとも6軸を固定して、計測点を、第1計測位置と同じ位置となる第2計測位置に移動させ(S4)、第2計測位置をレーザー変位計により計測すると(S5)4軸の誤差角度Δθ4を(4)式で求め(S6)、誤差角度Δθ4を用いて4軸の原点位置を較正する(S7)。
(もっと読む)
ロボット教示装置
【課題】イネーブルスイッチを備えるロボット教示装置において、ロボットの動作に関する物理量の調整を効率的に行うことのできる技術を提供する。
【解決手段】ロボット教示装置300は、所定の操作可能範囲内における操作量が大きくなるにつれ、ロボットを停止状態、作動状態、停止状態の順に切り換えるイネーブルスイッチ316と、前記操作可能範囲内のロボットが作動状態となる区間におけるイネーブルスイッチ316の操作量を検出する検出部と、ロボットが作動状態にある場合に、前記検出された操作量に応じて、ロボットの動作に関する物理量を調整する制御部と、を備える。
(もっと読む)
ロボットのツールベクトルの導出に用いる治具
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する際に好適な治具を提供する。
【解決手段】本発明に係る治具10は、先端部に平面接触子14が備えられると共に平面接触子14に対し垂直方向を向く計測軸に沿った変位を計測可能で且つ平面接触子14でツール先端の位置ずれ量を計測して実績位置ずれ量とする3つの変位計11と、3つの変位計の各計測軸が1点で互いに直交し且つ各計測軸の交点が空間上の所定点となるように、3つの変位計11を配備する配備手段15と、を有する。
(もっと読む)
ロボットシステム
【課題】板厚が未知の場合であってもワークの撓みを抑えた状態でスポット溶接ロボットの溶接点教示位置を自動で修正し、溶接品質を向上させる。
【解決手段】ロボット1に溶接点位置を教示するに際し、可動電極21と固定電極22とによって溶接点を挟む位置にスポット溶接ガン2を移動させる第1の処理と、モータ駆動により可動電極21を被溶接部材Wに向けて伸ばし、モータへのトルク指令に基づいて可動電極21と被溶接部材Wとの接触を検出し、接触検出後に可動電極21の動作を停止させる第2の処理と、モータ駆動により可動電極21が被溶接部材Wと接触した状態を保ちながら、ロボット1を可動電極21側へ動作させて固定電極22を被溶接部材Wに接近させ、ロボット1の関節に作用する外乱トルクによって固定電極223被溶接部材Wとの接触を検出し、接触検出後にロボット1の動作を停止させる第3の処理 とを含む。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
ロボット教示装置、該装置のコントローラ、およびプログラム
【課題】教示用アームを使用する従来技術のロボット教示装置においては、教示用アームの指示具を教示しようとしている作業点に移動させようとした際、教示用アームの可動範囲を越えているために指示具が所望の作業点に届かない場合、教示作業者は、該指示具が教示しようとしている作業点に届くようロボットを動作させるために、教示用アームからプログラミングペンダントに持ち替えて手動でプログラミングペンダントを操作しなければならず、面倒であった。
【解決手段】例えば、ロボットに取り付けられた教示用アームの余裕に関係した余裕度を求め、求めた余裕度が所望の閾値以下である場合に、当該余裕が小さくならないようにロボットの動作を制御するロボット教示装置を提供する。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
ロボット制御システム
【課題】
1台の可搬式操作部を、複数のコントローラにつなぎ換えて使用する場合、操作者のミスにより意図せぬロボットと接続してしまい、意図せぬロボットを操作してしまうことを防止する。
【解決手段】
ロボット制御システムは、ティーチペンダント10と無線通信で情報を送受信する複数のコントローラ20Aと、コントローラ20A毎に接続されるとともに該コントローラ20Aにより制御可能なロボットを備える。コントローラ20Aは、ティーチペンダント10と接続関係が構築された際、ロボットモータを制御するサーボドライバ27に電力供給遮断を行うマグネットスイッチMSに対して電力遮断指令を付与するマグネットスイッチ制ラダー部60を備える。マグネットスイッチMSは、電力遮断指令に基づいてサーボドライバ27への電力を遮断する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法
【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
21 - 40 / 102
[ Back to top ]