
Fターム[3D041AA30]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 発進性の向上 (141)
Fターム[3D041AA30]に分類される特許
1 - 20 / 141
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
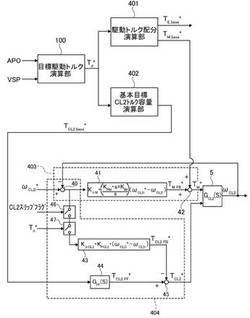
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
ハイブリッド車両

【課題】運転者からの発進のためのトルク要求に対する応答性を高める。
【解決手段】内燃機関10と、電動機30と、内燃機関10が発生するトルクを摩擦により車輪80の側に伝達するクラッチ機構20とを備え、クラッチ機構20と車輪80との間におけるトルクの伝達経路に電動機30が配置されたハイブリッド車両HEVは、運転者からの要求トルクに応じて、内燃機関10に発生させるべきトルクの指令値である第1指令値CV1および電動機30に発生させるべきトルクの指令値である第2指令値CV2を決定する指令値決定部110と、停車状態からの発進時に、電動機30が発生するトルクを増加させるように第2指令値CV1を補正し、補正された第2指令値CCV1を生成する補正部120とを備える。
(もっと読む)
車両制御装置
【課題】自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供すること。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
車両駆動装置のための制御装置
【課題】内燃機関、摩擦係合装置、回転電機の順に設けられた車両駆動装置において、摩擦係合装置のスリップ制御時にトルク増幅制御も可能とする。
【解決手段】摩擦係合装置12の伝達トルク容量を決定するトルク容量決定部と、摩擦係合装置の入出力速度比に基づいて、1以上の値となるトルク増幅率を導出するトルク増幅率導出部と、トルク容量決定部により決定された伝達トルク容量と、増幅率導出部により速度比に基づいて決定されたトルク増幅率とを用い、伝達トルク容量にトルク増幅率を乗算した値から伝達トルク容量を減算した値に基づいて、回転電機の出力トルクの指令値を決定するトルク指令値決定部とが備えられる。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
運転操作支援装置、運転操作支援方法
【課題】停車状態を維持するための制動力を運転者のアクセル操作に応じて解除して車両を発進させる際に、車速コントロールの操作性を向上させる。
【解決手段】アクセル操作量Saが第一の閾値th1以下のときには、最終制動力指令値FBを保持制動力指令値FBPKBとし、アクセル操作量Saが第一の閾値th1を超えるときには、アクセル操作量Saが大きいほど、保持制動力指令値FBPKB未満の範囲で最終制動力指令値FBを小さくする(ステップS109)。一方、アクセル操作量Saが第二の閾値th2以下のときには、駆動力指令値FAはクリープトルクTcに設定し、アクセル操作量Saが第二の閾値th2を超えると、アクセル操作量Saが大きいほど、クリープトルクTcよりも大きな範囲で駆動力指令値FAを大きくする(S112)。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
車両発進補助制御システム
【課題】運転者が違和感を覚えない車速での発進と発進後の車速を時間経過と共に運転者の意図する速さへと制御すること。
【解決手段】自車のいる路面の勾配を検出又は推定し、その勾配と発進からの経過時間又は運転者のアクセル操作からの経過時間とに応じて制動力制御による停車保持状態からの発進時の目標車速を設定し、その発進時に前記目標車速となるように動力源等の駆動装置や制動装置を制御して車速制御を行うこと。その目標車速については、降坂路で停車保持状態から発進させる場合、自重による加速度を抑える速さに設定すればよい。
(もっと読む)
アイドルストップ車の制御装置
【課題】エンジン再始動時のヒルスタートの制御に用いられる液圧制御バルブの消費電力の状態を考慮したアイドルストップの制御を行なう。
【解決手段】アイドルストップの制御によってエンジンを自動停止する前に、それまでの走行中の通電駆動によりブレーキアクチュエータ7のソレノイドバルブ群8のブレーキ液圧制御バルブ8a、8bが所定温度以上になっているか否かを、ブレーキ制御ユニット13の判断部13dにより判断し、ヒルスタートの制御に用いられるブレーキ液圧制御バルブ8a、8bが所定温度以上の高温の状態であってその消費電力が大きい状態であると判断すれば、ブレーキ制御ユニット13の禁止指令部13bによりアイドルストップの制御を禁止し、ブレーキ液圧制御バルブ8a、8bの消費電力の状態を考慮して、エンジンの再始動が確実に行なえるときにのみアイドルストップの制御を行なう。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】運転者のアクセル操作量に対する最適な要求値を決定することにより、運転者の感性に即した加速を十分に実現することができる車両制御システムおよび車両制御方法を提案すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン、T/M)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御する車両制御装置とを備える。車両制御装置は、一定アクセル開度における速度と加速度との関係により定められたアクセル一定時加速度を条件とするアクセル開度Paと要求加速度Gxとの関係に基づいて決定された要求加速度Gxに基づいて加速度発生装置を制御する。
(もっと読む)
ハイブリッド電気自動車の発進制御装置
【課題】走行用動力源の電動機を用いたエンジン自動始動後に発進変速段への切換操作に起因する遅れを生じることなく迅速に車両を発進できるハイブリッド電気自動車の発進制御装置を提供する。
【解決手段】停車状態からの車両発進時においてエンジン1が自動停止されているとき、第1歯車機構G1をニュートラル状態にすると共にアウタクラッチ21を接続して電動機2によりエンジン1を始動する一方、第2歯車機構G2を第3速に切り換えてインナクラッチ22を接続し、この第3速を介してエンジン1の駆動力で車両を発進させることにより、第1歯車機構G1をニュートラル状態から発進変速段である第2速に切り換えることによる遅れを防止する。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
動力伝達装置
【課題】非走行用ポジションから走行用ポジションへシフト操作された際に走行の開始をスムーズに行なえるようにする。
【解決手段】シフトレバーがN(ニュートラル)ポジションのときにクラッチC1内の作動油をマニュアルバルブ40を介してドレンする油圧回路30が組み込まれた動力伝達装置を備える車両において、エンジンが自動停止されている状態でシフトレバーがNポジションから解除されたときには、その直後に電磁ポンプ70の駆動を開始し、シフトレバーがDポジションを確定したときには、エンジンを自動始動すると共にエンジンが完爆したときに電磁ポンプ70の駆動を停止する。これにより、エンジンの自動始動に伴って機械式オイルポンプ32が駆動を開始したときにクラッチC1を迅速に係合して車両を発進させることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】切り替え機構の故障時における好適なフェールセーフを実現する。
【解決手段】
内燃機関(200)と、動力伝達機構(400)と、第1電動発電機(MG1)と、駆動軸(600)との間で動力の入出力が可能に構成された第2電動発電機(MG2)と、蓄電手段(12)と、動力伝達機構に備わる一の回転要素(S2)の状態をロック状態と非ロック状態との間で選択的に切り替え可能なロック機構(500)とを備えたハイブリッド車両は、ロック機構が固定変速モードから無段変速モードへ変速モードを切り替え可能な正常状態にあるか否かを判別する判別手段(100)と、ロック機構が正常状態にないと判別され且つ変速モードとして固定変速モードが選択されるフェールセーフ要求期間において、第2電動発電機の電力回生量をロック機構が正常状態にある場合と較べて増加側へ補正する補正手段(100)とを具備する。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
車両用制御装置
【課題】状況に応じてニュートラル制御機能又はアイドルストップ機能を適切に実行させることができる車両用制御装置を提供する。
【解決手段】アイドルストップ機能を有すると共に、変速装置の入力クラッチと、エンジンにより駆動される機械式ポンプと、エンジンの停止時に電動モータにより駆動される電動ポンプと、を有する車両に備えられた車両用制御装置41。少なくとも所定のニュートラル移行条件を満たす場合に、入力クラッチに対する供給油圧を油路のライン圧により制御し、入力クラッチが半係合状態とされるニュートラル状態を実現するニュートラル制御部45と、ニュートラル移行条件が成立した場合に、ニュートラル状態への移行を所定の遅延時間だけ遅延させる移行遅延制御部47と、遅延時間中にアイドルストップ条件が成立しなかった場合に、ニュートラル状態に移行させる移行開始制御部49と、を備える。
(もっと読む)
1 - 20 / 141
[ Back to top ]