
Fターム[3D041AE41]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | ブレーキ (1,377)
Fターム[3D041AE41]の下位に属するFターム
Fターム[3D041AE41]に分類される特許
161 - 180 / 1,321
走行支援装置
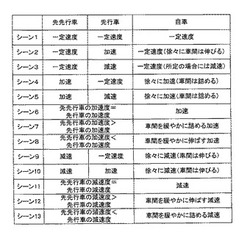
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
路外逸脱防止装置

【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
走行支援装置
【課題】ステアリング及びブレーキによる車線逸脱防止制御中のドライバの操舵介入に対しては違和感のない逸脱防止制御を行うことはできない。
【解決手段】自車が車線からの逸脱しそうな場合又は自車が周囲障害物と衝突しそうな場合に、ブレーキ制御装置によるヨーモーメント又はステアリング制御装置のアシスト操舵トルクの少なくとも一つを制御し、自車の車線からの逸脱又は自車の周囲障害物との衝突を防止する制御装置であって、ステアリングのハンドル舵角,ドライバの操舵トルク及びアシスト操舵トルクの少なくとも一つに基づきドライバの操舵意思を検出し、ドライバの操舵意思を妨げないようにヨーモーメント又はアシスト操舵トルクの少なくとも一つを抑制する。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
車両制御装置
【課題】スタック状態からの脱出を容易にする車両制御装置を提供すること。
【解決手段】ドライバによって切り換え可能な悪路制御モード切換スイッチによって、悪路制御モードに切り換えられると悪路制御を実行する悪路制御手段を設けた。悪路制御手段は、車輪の所定の制動力を与える制動力付与手段と、前記制動力付与手段により制動力が付与されている車輪に対して所定の駆動力を与える駆動力付与手段と、を備えたことを特徴とする車両制御装置。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
乗用型農作業機
【課題】静油圧式無段変速機(HST)を備えた乗用型田植機において、変速操作レバーの操作を容易ならしめる。
【手段】走行モードの変更は、変速操作レバー54を操作して走行変速装置24のギアの噛み合いを変えることで行われる。走行変速装置24はHST41とギア群とを併用している。HST41は電動モータ122によって制御され、電動モータ122は変速ペダル62の動きを検知するセンサ装置からの信号で駆動される。変速ペダル62が戻り切ると回転軸109の戻り回転によって連動軸165が後退動し、するとクラッチアーム159がクラッチ切り方向に回動すると共に、ブレーキが軽く効く。一々足を踏み替えてブレーキペダル100を踏まなくても変速操作レバー54を操作できるため、操作性に優れている。
(もっと読む)
車両制御装置
【課題】ドライバに違和感を与えることなくドライバのペダル操作負担を軽減可能な車両制御装置を提供する。
【解決手段】ドライバのアクセル操作状態を検出するアクセル操作状態検出部と、自車両の速度を減速させる減速装置と、自車両の速度を算出する車体速算出部と、検出されたアクセル操作状態と算出された車体速に基づいて目標車体速を設定し、目標車体速となるように制御する速度制御部を有するコントロールユニットと、を備えた。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車両制御装置
【課題】ドライバの意図に沿った走行状態を実現する車両制御装置を提供する。
【解決手段】先行車に対して追従制御を行う車間距離制御または設定された速度に収束するように定速走行を行う定速走行制御を備えた車両制御装置において、ドライバのブレーキ操作状態を検出するブレーキ操作状態検出装置と、車間距離制御又は定速走行制御を実施中にブレーキ操作が検出されると、ブレーキ操作状態に応じた減速を行う減速制御部と、ブレーキ操作の終了が検出されると加速方向の制御をキャンセルする加速制御制限部とを有するコントロールユニットを備えた。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
車両用接触回避支援装置
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
走行制御装置
【課題】レーダ装置の発熱および劣化が生じることを的確に抑制する。
【解決手段】走行制御装置10は、先行車両に対する追従走行と渋滞追従走行とを制御する制御ステート決定部34と、追従走行の実行時に自車両の進行方向に向けて発信する電磁波の出力を増大させる出力増大モードを実行し、かつ出力増大モードよりも電磁波の出力を低減させる出力低減モードを所定時間間隔毎に一時的に出力増大モードから切り替えて実行し、渋滞追従走行の実行時には、出力低減モードを実行する発信部11aと、追従走行の実行時に、出力増大モードの反射波の反射レベルと出力低減モードの反射波の反射レベルとの比較結果に基づき、出力増大モードと出力低減モードとの切り替えの異常の有無を判定する切替異常判定部36とを備え、制御ステート決定部34は、切替異常判定部36の判定結果において異常が有る場合に渋滞追従動作の実行を禁止する。
(もっと読む)
車両用接触回避支援装置及び車両用操舵アシスト装置
【課題】障害物との接触回避をより好適に支援することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14は、車両10と車両10前方の障害物12との相対位置を検出する相対位置検出手段80と、前記相対位置に基づいて接触回避の支援の要否を判定し、接触回避の支援が必要であると判定したとき、回避方向への操舵アシストを制御する操舵アシスト制御手段20と、車両10にかかるヨーモーメントMyに影響を及ぼし且つ当該影響が操舵方向により異なる走行環境を検出する走行環境検出手段20、83とを備え、前記操舵アシスト制御手段20は、前記走行環境に基づいて前記回避方向への操舵のアシスト力Fasiを補正する。
(もっと読む)
161 - 180 / 1,321
[ Back to top ]