
Fターム[3D041AE41]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | ブレーキ (1,377)
Fターム[3D041AE41]の下位に属するFターム
Fターム[3D041AE41]に分類される特許
121 - 140 / 1,321
車群走行制御装置
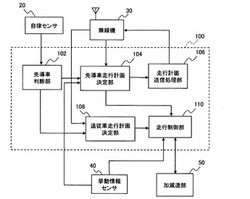
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
アクセル装置およびこれを用いた車両追突防止システム

【課題】機械の操作者が事故の危険に気付かずにアクセル操作を続けた場合でも、その事故を未然に回避することのできるアクセル装置およびこれを用いた車両追突防止システムが要求されている。
【解決手段】アクセル装置1は、アクセルペダル3と、スロットルレバー5にアクセルペダル3を接続するアクセルワイヤ6とを備えて成る装置であって、アクセルワイヤ6は、一端部7Aがアクセルペダル3に接続される駆動側部材7と、一端部8Aがスロットルレバー5に接続される従動側部材8とから構成され、駆動側部材7の他端部7Bと従動側部材8の他端部8Bとはクラッチ機構10を介して断続自在に連結され、クラッチ機構10を切断するための断続用スイッチ13が配備されている。このアクセル装置1は、例えば車両Bの追突防止システムAに用いられる。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車両制御システム
【課題】自動的に動力源の運転を停止および再開させる場合の燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】車両の動力源が車両の駆動輪によって回転駆動されるときの駆動輪に作用する動力源による負荷の大きさを変更可能な負荷変更手段と、負荷変更手段を制御する制御装置とを備え、制御装置は、車両の走行時に動力源による動力の発生を停止させる動力源停止制御を実行可能であり、制御装置は、動力源停止制御が実行され、かつ動力源が駆動輪によって回転駆動されている間に、運転者による制動操作の終了が検出され、制動操作の終了の検出後に運転者による加速操作の開始が検出された(S1−Y)ときに、制動操作の終了から加速操作の開始までの経過時間が予め定められた所定時間以上である(S2−Y)と、動力源による動力の発生を再開させることなく、負荷変更手段によって負荷の大きさを減少させる(S3)。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
駆動制御装置
【課題】車両の制御に起因する運転者の違和感を低減する。
【解決手段】駆動制御手段(100)は、車両(1)に搭載され、車両の走行状態に係る情報である走行状態情報を、車両が走行している位置に係る情報である位置情報に関連付けて学習する学習手段(12)と、学習された走行状態情報に応じて、学習された走行状態情報を車両の駆動制御に用いる際の度合いを決定する決定手段(15)とを備える。
(もっと読む)
ブレーキと間違え,アクセルを一気に踏み込んでしまった時,速やかにエンジンと車両を停止させるシステム
【課題】突然の飛び出しや身体をひねっての後退運転をする場合などで、ブレーキペダルと間違えてアクセルペダルを一気に踏み込んでしまい事故に至る場合がある。このような場合瞬時にエンジンを停止させ、同時にブレーキを作動させて車両の暴走を防ぎ事故を防止するための機構である。
【解決手段】ブレーキのつもりでアクセルペダルを一気に踏み込んだ場合、アクセルペダルに押されてスイッチが入り、そのスイッチの連動でイグニション回路や燃料ポンプ、あるいはコンピュータなどを停止させ、直ちにエンジンを停止させる。更に、スイッチの連動によって電磁式ブレーキを作動させて車両を停止させるものである。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
走行制御装置および走行制御方法
【課題】複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】パターン走行部RT1は、経路パターンPT1〜PT10に対応する走行経路ごとに区切られセクションが設定される。走行制御装置100は、車両1にパターン走行部RT1を自律走行させる場合、車両1に各セクションを第1セクションから順番に、セクション単位で走行させる。よって、車両1が現在走行しているセクションと、他のセクションとが接近していたり、交差している場合でも、車両1が他のセクションを走行し始めることがないので、車両1に現在走行中のセクションを継続して走行させることができる。従って、複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両制御装置
【課題】制動回避が困難な場合において操舵回避を適切に行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、ECU5を備え、このECU5により、障害物に対する制動回避制御を行うために必要な必要減速度が算出されると共に、車両10の走行状態に基づいて制動回避制御を行うために車両10が実行可能な目標となる目標減速度が算出される。そして、ECU5により、必要減速度と目標減速度との差に基づいて、障害物に対する操舵回避制御の開始タイミングΔtが算出される。よって、必要減速度が目標減速度よりも大きく、制動回避制御が困難な場合、減速度の不足に応じて操舵回避制御の開始タイミングが決定されることとなる。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
アイドルストップ車の制御装置
【課題】エンジン再始動時のヒルスタートの制御に用いられる液圧制御バルブの消費電力の状態を考慮したアイドルストップの制御を行なう。
【解決手段】アイドルストップの制御によってエンジンを自動停止する前に、それまでの走行中の通電駆動によりブレーキアクチュエータ7のソレノイドバルブ群8のブレーキ液圧制御バルブ8a、8bが所定温度以上になっているか否かを、ブレーキ制御ユニット13の判断部13dにより判断し、ヒルスタートの制御に用いられるブレーキ液圧制御バルブ8a、8bが所定温度以上の高温の状態であってその消費電力が大きい状態であると判断すれば、ブレーキ制御ユニット13の禁止指令部13bによりアイドルストップの制御を禁止し、ブレーキ液圧制御バルブ8a、8bの消費電力の状態を考慮して、エンジンの再始動が確実に行なえるときにのみアイドルストップの制御を行なう。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
121 - 140 / 1,321
[ Back to top ]