
Fターム[3D041AE41]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | ブレーキ (1,377)
Fターム[3D041AE41]の下位に属するFターム
Fターム[3D041AE41]に分類される特許
61 - 80 / 1,321
車両の制御装置
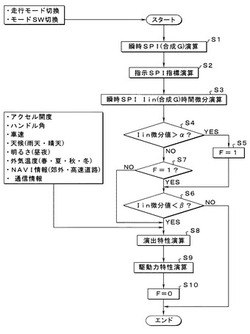
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両の坂道発進補助装置

【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
車体制振制御装置
【課題】ピッチング振動の抑制を上下バウンス振動の抑制に優先させて、ピッチング振動の抑制不足による乗り心地の悪化を、多大な工数に頼ることなく防止し得るようになす。
【解決手段】演算部51でアクセル開度APOおよびブレーキペダル踏力BPFから要求制駆動トルクTwを演算し、算出部52で車輪速Vwの変化から前後方向外乱(ΔFf,ΔFr)を算出する。推定部53はTwの変化に伴う車体振動(ピッチング振動θpおよび上下バウンス振動xb)と、外乱に伴う車体振動とを推定する。演算部54は、当該推定したTwの変化に伴う車体振動および外乱に伴う車体振動をそれぞれ抑制するための制振用制駆動トルク補正量を求め、算出部56は、これらトルク補正量と、設定部55からの抑制優先度とから、この優先度を満足しつつ車体振動を抑制するための制振用制駆動トルク補正量指令(dTw*)を求めて、車両の制駆動力を補正する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】車両に搭載されるバッテリの負荷の低減を図りつつ、車両の安全性を確保した状態でエンジンを再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、エンジンの再始動の許可後(第2のタイミングt2)においてエンジンの始動不調を検知した場合に、エンジンの再始動を禁止すると共に、車輪に対する制動力を増大させる制御を開始する(第4のタイミングt4)。その後、ブレーキ用ECUは、車両が停車した場合に、車輪に対する制動力を保持させる制御を開始すると共に、エンジンの再始動を許可する(第5のタイミングt5)。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両走行制御装置
【課題】車両走行時における燃費の向上とブレーキ負荷の低減とを両立することのできる車両走行制御装置を提供すること。
【解決手段】エンジン3で発生する動力によって走行する車両1の走行時に、エンジン3を停止すると共にエンジン3と駆動輪12との間でトルクの伝達を遮断することによって車両1を惰性で走行させる場合に、ブレーキ装置14の負荷を監視し、ブレーキ装置14の負荷状況に応じてブレーキ装置14のみで速度を調節する制御からエンジン3で発生させる減速力も併用して速度を調節する制御へ運転操作を誘導する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
速度制御装置
【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両制御装置
【課題】自車の走行時の状態に応じて、より適切な走行モードに切替えることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する通信追従走行制御と、先行車100と自車1との間の位置関係情報をレーダー12で取得し、取得した位置関係情報に基づいて自車1の走行状態を制御する自律追従走行制御と、を切替えて追従走行が可能な走行制御ECU20を備え、通信追従走行制御中に通信追従走行制御を行うことが困難になった場合には自律追従走行制御に切替え、且つ、切替え後の自車1と先行車100との車間距離または車間時間を通信追従走行制御中における車間距離または車間時間よりも大きくする。
(もっと読む)
車両制御装置
【課題】先行車の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することのできる車両制御装置を提供すること。
【解決手段】自車1の前方の先行車100の車車間通信情報に基づいて、自車1が先行車100に追従する追従走行制御中に、自車1が先行車100の車車間通信情報を取得する際における取得状況に応じて、追従走行制御時のパラメータを決定する。これにより、車車間通信情報の取得状況に応じた追従走行制御を行うことができ、例えば、先行車100の車車間通信情報を適切に取得できる場合には、取得した車車間通信情報を用いて理想的な追従走行制御を行い、先行車100の車車間通信情報の取得が困難な場合には、車車間通信情報に対する依存性を低くして追従走行制御を行うことができる。この結果、先行車100の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することができる。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、クラッチを用いた動力伝達モードの切替えを好適に行う。
【解決手段】ハイブリッド車両の制御装置(100)は、第1電動機(MG1)、第2電動機(MG2)及び内燃機関(200)を含む動力要素と、駆動軸(500)と、第1回転要素(S1)、第2回転要素(R1)、第3回転要素(C1)を有する動力伝達機構(300)と、クラッチ(710)と、第2ブレーキ(720)とを備えたハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、第1モード及び第2モードの間で、動力伝達モードを切替える切替手段(150)と、クラッチの回転数を検出するクラッチ回転数検出手段(130)と、クラッチの回転数が第1所定値以下である場合に、第1モードから第2モードへの動力伝達モードの切替えを停止する切替停止手段(140)とを備える。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
61 - 80 / 1,321
[ Back to top ]