
Fターム[3D049RR02]の内容
ブレーキシステム(弁・付属装置) (11,250) | 検出対象 (1,876) | 減加速度 (72)
Fターム[3D049RR02]に分類される特許
1 - 20 / 72
車体挙動安定化装置
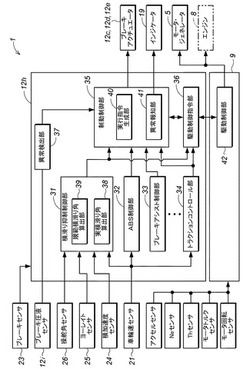
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
ブレーキ装置

【課題】ブレーキ装置において、ノックバックによる応答性の低下を防止しつつ、ディスクロータ及びブレーキパッドの偏摩耗を防止する。
【解決手段】通常は、ブレーキペダル19の操作によってマスタシリンダ4で発生した液圧をディスクブレーキ2に直接供給して制動力を発生させる。また、コントローラ14によって液圧ポンプモータ7を作動させてディスクブレーキ2に液圧を供給することによって制動力を発生させることができる。急旋回等によってノックバックが生じた場合、ピストン16の後退を許容することにより、ブレーキパッド17及びディスクロータ18の偏摩耗を防止する。その後、ノックバックの要因が解除されたとき、コントローラ14によって液圧ポンプモータ7を作動させ、ピストン16を前進させてパッドクリアランスを調整することにより、応答性の低下を防止する。
(もっと読む)
車両用ブレーキ制御装置
【課題】負圧センサのような圧力センサを用いずとも、ブレーキペダルの踏込量に応じた減速度にて車両を減速させることが可能な車両用ブレーキ制御装置を提供する。
【解決手段】ブレーキペダル13のペダルストロークに応じて、車両に生ずべき速度減少量ΔVaを予測し、実際に車両に生じている速度減少量ΔVとの差Vに基づいて、その差Vが小さくなるように、車両に作用する制動力を制御する。このため、ブレーキ倍力装置20に供給される圧力を検出せずとも、ブレーキペダル13のストロークに対応する、適正な制動力を車両に作用させることができる。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
車両用制動装置
【課題】マスタシリンダ圧力を検出する圧力センサの零点補正値を適切に更新することができる車両用制動装置を提供する。
【解決手段】マスタシリンダ23により調整された液圧の圧力に対応する出力値を検出する油圧センサ40と、マスタシリンダ23の圧力が0となる油圧センサ40の出力値を零点補正値として記憶し、該零点補正値に基づいて油圧センサ40の出力値を補正してマスタシリンダ圧力を算出するマスタシリンダ圧力算出部52と、を備える車両用制動装置20において、油圧センサ40により検出された出力値が、マスタシリンダ圧力算出部52に記憶されている零点補正値より小さい場合に、該出力値を新たな零点補正値として設定し、零点補正値を更新する零点補正値更新部54を備える。
(もっと読む)
フェード判定装置及び制動装置
【課題】適正にブレーキ装置のフェード状態を判定することができるフェード判定装置及び制動装置を提供することを目的とする。
【解決手段】フェード判定装置7は、車両1の減速度と車両1の車輪2のスリップ量とに基づいて、車輪2を制動するブレーキ装置11のフェード状態を判定することを特徴とする。制動装置6は、車両1の車輪2に生じる制動力を調節可能なブレーキ装置11と、制動力を制御して車輪2のスリップ状態を制御する制御装置7とを備え、制御装置7は、車両1の減速度と車輪2のスリップ量とに基づいて、ブレーキ装置11のフェード状態を判定し、フェード状態に応じて制動力の増減量を調節することを特徴とする。したがって、適正にブレーキ装置11のフェード状態を判定することができる、という効果を奏する。
(もっと読む)
電動負圧ポンプの制御装置
【課題】電動負圧ポンプを必要最小限な時間だけ駆動して負圧を安定的に供給しつつ、電動負圧ポンプの寿命延長を図ることができる電動負圧ポンプの制御装置を提供すること。
【解決手段】ブレーキブースタ4に負圧を供給する電動負圧ポンプ8と、該電動負圧ポンプ8によって前記ブレーキブースタ4に供給される負圧を検出する負圧センサ15と、ブレーキ操作のON/OFFを検知するブレーキランプスイッチ16を備えた車両の前記電動負圧ポンプ8の制御装置(コントローラ10)において、前記負圧センサ15の故障時に前記ブレーキランプスイッチ16がON信号を出力すると、前記電動負圧ポンプ8を所定時間だけ駆動し、該電動負圧ポンプ8が駆動される前記所定時間をブレーキ操作回数や車両の状態(減速度や傾斜角)に応じて変更する。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両用制御装置
【課題】ヨーレートセンサの異常判定に用いる閾値の設定を容易にするとともに、誤判定を確実に防止することを目的とする。
【解決手段】車両用制御装置は、実ヨーレートの変化率が所定値以上である場合に実ヨーレートが急変したと判定する急変判定を行った場合には、急変判定前にヨーレートセンサで検出された実ヨーレートに対応した値と、急変判定後にヨーレートセンサで検出された実ヨーレートに対応した値との差である第1の偏差を算出するとともに、急変判定前に位置補正をして算出した推定横加速度に対応した値と、急変判定後に位置補正をして算出した推定横加速度に対応した値との差である第2の偏差を算出し、第1,第2の偏差の符号が互いに正負逆である場合に(ステップS14:Yes)、ヨーレートセンサが異常であると判定する。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】静圧相当制御中に、移動判定時間内のパルス累積値が移動判定しきい値以上になった場合には、通常時制御が実行される。それにより、ブレーキシリンダ液圧が増加させられ、車両の移動が良好に防止される。このように、パルスの累積値に基づくため、回転速度に基づく場合に比較して、車両のゆっくりした移動の有無を、正確に検出することが可能となる。また、その後、パルス無し状態が停止判定時間以上継続すれば、静圧相当制御が開始されるのであり、静圧相当制御を適切に行うことが可能となる。
(もっと読む)
非常ブレーキ機構
【課題】機器等に格別の構造改変を伴うことなく、パーキングブレーキによるサービスブレーキ失陥時のフェルセーフが可能な非常ブレーキ機構を提供する。
【解決手段】サービスブレーキ系統1〜4とパーキングブレーキ系統7〜10が独立して設けられたブレーキ機構において、前記サービスブレーキの操作手段の操作によって所定の減速度が得られない場合に、前記パーキングブレーキ系統の操作手段10Aが自動的に操作されることにより、格別の機器等を追加せずとも、自動パーキングブレーキの作動アルゴリズムを追加するだけで、運転者が減速ないし停止しようとしている意思に拘らず、所定の減速度が得られない場合には、パーキングブレーキ系統の失陥と判断して、自動的にパーキングブレーキを作動させることが可能となり、大事故を回避できる。
(もっと読む)
ブースター負圧の推定方法及び車両の制御装置
【課題】簡易な構成でありながらも、ブースター負圧の推定を精度良く行うことのできるブースター負圧の推定方法、及びブースター負圧を的確に把握することでその不足を好適に防止することのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット9は、エンジン1の吸気負圧を利用して形成されたブースター負圧によりブレーキ踏力の助勢を行うブレーキブースター5を備える液圧ブレーキシステムにおいて、車両の制動減速度をGセンサー11の検出結果から演算するステップと、規定の演算周期におけるブースター負圧の回復量を演算するステップと、制動減速度とブースター負圧の消費量との関数を用い、上記演算周期におけるブースター負圧の消費量を制動減速度に基づいて演算するステップと、演算された回復量及び消費量に基づいてブースター負圧の推定値を演算するステップとを、上記演算周期毎に実行してブースター負圧の推定を行うようにしている。
(もっと読む)
車両振動判別装置及び車両振動判別方法
【課題】ブレーキに起因する振動とタイヤ等に起因する振動とを判別可能な車両振動判別装置等を提供する。
【解決手段】車両振動判別装置を、車両の振動を検出する振動検出手段と、車両の制動状態及び非制動状態を検出する制動検出手段と、制動状態において検出された振動に関するデータと非制動状態において検出された振動に関するデータとをそれぞれ蓄積する振動データ記録手段と、制動状態において検出された振動と非制動状態において検出された振動とを比較することによってブレーキ起因の振動と車輪起因の振動とを判別する振動判別手段とを備える構成とする。
(もっと読む)
ブレーキ装置
【課題】バキュームブースタを備えたブレーキ装置において、センサ異常時に、助勢限界後アシスト制御が適切に行われるようにする。
【解決手段】ブースタ負圧センサ、大気圧センサ、マスタシリンダ液圧センサのうちの少なくとも1つが異常である場合には、助勢限界時液圧を正確に取得できなかったり、マスタシリンダ液圧を正確に取得できなかったりするため、助勢限界後アシスト制御を適切な時期に開始することが困難であり、アシスト量を適切な大きさに制御することが困難である。そこで、減速度センサの検出値が設定減速度GB以上になった場合に助勢限界後アシスト制御が開始され、助勢限界後アシスト制御において、アシスト量を一定の固定値とする。それにより、センサが異常であっても、助勢限界後アシスト制御を適切に行うことができる。
(もっと読む)
車両の制動装置及び制動方法
【課題】自動減速制御への移行時の応答遅れを低減可能な車両の制動制御技術を提供する。
【解決手段】マスタシリンダM/Cからの流体を遮断可能な制動切替弁5,6を備え、制動操作子の操作とは異なる制動条件を満足すると、制動切替弁5,6を開状態に保持し且つ上記流体圧制御回路7を制御する自動制動制御状態にする。その上記自動制動制御状態が終了しても、弁保持解除条件を満足するまで上記制動切替弁5,6の閉状態を継続する。上記弁保持解除条件は、運転者に対し上記制動切替弁5,6の作動音をマスキング可能な音が発生している状態であるマスキング状態と推定しているときである。
(もっと読む)
車両の制御装置
【課題】車両への荷重入力により制動手段に不具合が生じたときであっても、ブレーキ油の漏れを防止すると共に、車両に適切な制動力を付与することができる車両の制御装置を提供すること。
【解決手段】加速度検出手段(第1,第2前後Gセンサ、第1,第2左右Gセンサ)11〜14により検出された加速度が予め定めた閾値を超えると共に、方向変更検出手段(ヨーレートセンサ)15により車両2の進行方向の変更が検出されたとき、制動手段20を作動して車輪FL,FR,RL,RRごとに制動力を付与することで車両2を減速させる車両挙動制御手段(図3)を備えた車両の制御装置であって、車両挙動制御手段(図3)は、制動手段20が作動中に、ブレーキ配管26a,26b内の圧力低下を検出したとき、車両2に作用する加速度方向を判定する加速度方向判定手段(ステップS6,図4A及び図4B)により得られた加速度入力方向に位置する車輪に対応したブレーキバルブを作動してブレーキ油の流動を遮断する。
(もっと読む)
電気自動車の制御装置
【課題】ブレーキセンサに異常が発生した場合において、電気自動車のクリープ走行性能を確保する。
【解決手段】低車速領域においてアクセル操作量が0%となる場合には目標クリープトルクが設定され、この目標クリープトルクに向けてモータジェネレータが制御される。また、目標クリープトルクはブレーキペダルの踏み込みに応じて引き下げられ、車両制動時におけるモータジェネレータの発熱等が抑制される。このように、ブレーキ操作量に応じて目標クリープトルクを変化させる電気自動車において、ブレーキ操作量を検出するブレーキセンサに異常が発生した場合には(ステップS11)、ブレーキ操作量に拘わらず予め設定された規定クリープトルクが目標クリープトルクとして採用される(ステップS15)。この規定クリープトルクは、クリープ走行性能を確保するために必要な大きさに設定されている。
(もっと読む)
ブレーキ装置
【課題】電子制御によるブレーキバイワイヤ型のブレーキ装置において、電子制御不能時にもブレーキペダルの操作により的確に制動力を生じさせることができるブレーキ装置を提供する。
【解決手段】マスタシリンダに対する軸芯方向の位置に応じてマスタシリンダに液圧を発生させる出力ピストン43と、出力ピストン43と同軸芯状に設けられ、出力ピストン43に対して軸芯方向に相対移動可能であり、ブレーキペダルの変位に連動する入力ロッド44と、入力ロッド44と出力ピストン43との間に設けられ、モータMの駆動力により入力ロッド44と出力ピストン43との係合を離脱するクラッチ機構60とを備えた。
(もっと読む)
制動制御装置
【課題】液圧制御性能を低下させることなく、比例電磁弁の駆動周波数で発生する作動音の低減を行うことが可能な制動制御装置を提供する。
【解決手段】設定された駆動周波数により駆動される比例電磁弁の開度に応じて液圧を調圧し、当該調圧した液圧に基づき制動力を制御する制動制御装置1は、要求される制動力に応じて液圧を調圧する際に要求される調圧精度に基づいて要求調圧精度指数を設定する要求調圧精度指数設定手段と、比例電磁弁を駆動する駆動周波数に起因する作動音の低減要求に基づいて要求作動音低減指数を設定する要求作動音低減指数設定手段と、設定された要求調圧精度指数及び要求作動音低減指数に基づいて比例電磁弁の駆動周波数を設定する駆動周波数設定手段14と、を備える。
(もっと読む)
制動制御装置
【課題】車両衝突後においても適切な制動力制御を実行する。
【解決手段】制動制御装置において、ストロークセンサは、ブレーキペダルの踏み込み操作量を検出する。マスタ圧センサは、ブレーキペダルの踏み込み操作に応じて液圧が変化するマスタシリンダの液圧を検出する。ECUは、目標ホイールシリンダ圧を決定し、決定した目標ホイールシリンダ圧に近づくよう液圧アクチュエータの作動を制御してホイールシリンダ圧を調整する。Gセンサは、車両の衝突を示す信号を検出する。ECUは、車両の衝突が検出されていない場合はストロークセンサの検出値およびマスタ圧センサの検出値の双方を利用して目標ホイールシリンダ圧を決定する。ECUは、車両の衝突が検出された後はストロークセンサの検出値の利用を回避しマスタ圧センサの検出値を利用して目標ホイールシリンダ圧を決定する。
(もっと読む)
1 - 20 / 72
[ Back to top ]