
Fターム[3D232DA91]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 乗員の操作 (1,442)
Fターム[3D232DA91]の下位に属するFターム
スロットル操作(アクセル操作) (457)
ブレーキ操作 (534)
パーキングブレーキ操作 (41)
トランスミッション(ギア位置を含む) (222)
クラッチ操作 (13)
Fターム[3D232DA91]に分類される特許
1 - 20 / 175
操向制御システム及びその方法
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
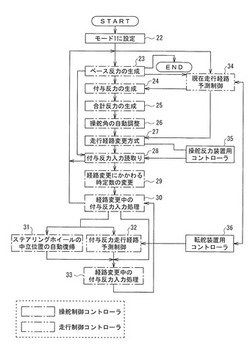
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車線逸脱防止制御装置

【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
電動パワーステアリング装置
【課題】開閉手段の作動音をユーザに聞こえ難くすることができる技術を提供する。
【解決手段】ドアを有する乗り物の進行方向を変えるためのステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに流れる電流を通電/遮断するべく電動モータに流れる電流の経路を開閉するリレーと、リレーの作動を制御するリレー作動部と、を備え、リレー作動部は、乗り物のドアの開閉音と重なるように開閉手段を作動させる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
自動操舵制御装置及びプログラム
【課題】補償処理を行うことにより不感帯による影響を軽減することのできる車両用の自動操舵制御装置を提供する。
【解決手段】自動操舵用アクチュエータの制御信号を補償する。スムース幅smwにより変化する補償後電流iと指示電流idの傾き変化を2段階α、βとした。a’とb’点の間に傾きαの線分L1を追加し、補償値の軌跡を、i軸値a'smw'、smw'b'及びa'b'までの長さで決める。不感帯除去の程度は角度αの大きさで決まり、スムース程度は角度βの大きさで決まる。補償性能の劣化しない目標としてスムース幅smwを調整し、その後、設定定数Kによりスムースの程度を調整するので、スムース幅smwを調整しなくでも、スムースの程度を調整できる。スムース幅smwを調整することによる不感帯補償性能の劣化を避け、ふらつきを低減できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機11を備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】ドライバーの煩わしさの低減を図ることができる運転支援装置及び運転支援方法を提供する。
【解決手段】
本発明に係る運転支援装置1は、所定の調整判定時間τより計測時間が短いときには、支援判定部18がリスクマップ作成部14によって算出された第1のリスク度をより低いリスク度である第2のリスク度に調整し、支援判定部18が、その第2のリスク度に応じて運転支援の内容を決定する。そのため、ドライバーがリスク対象を注視してから早期に回避操作を行った場合、運転支援のレベルを低下させることができ、ドライバーに対して過度の運転支援をする事態が抑制され、その結果、運転支援の際のドライバーの煩わしさが効果的に低減される。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
車両用運転支援装置
【課題】車両の前進時に、内輪差による捲き込みを回避するように運転者を十分に支援すること。
【解決手段】車両前方を撮像する撮像手段と、前記撮像手段によって撮像された画像を表示し、該表示された画像上でユーザーが車両前方の回避ポイントを設定可能な画像表示・回避ポイント設定手段と、運転者に情報提供可能な情報提供手段と、前記運転者が前記回避ポイント側に規定量のステアリング操作を行なっても前記回避ポイントを回避して走行可能なステアリング操作許容ポイントを算出し、車両が該算出したステアリング操作開始許容ポイントに至ると所定の情報提供を行なうように前記情報提供手段を制御する制御手段と、を備える車両用運転支援装置。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
1 - 20 / 175
[ Back to top ]