
Fターム[3D232DA93]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 乗員の操作 (1,442) | ブレーキ操作 (534)
Fターム[3D232DA93]に分類される特許
1 - 20 / 534
自動車
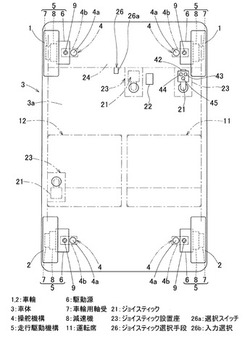
【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
自動車

【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
操舵装置
【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
車両用操舵装置、操舵力推定装置、操舵制御方法および操舵力推定方法
【課題】車両用操舵装置において、操舵トルクあるいはラック軸力をより高精度に推定できるようにする。
【解決手段】車速を検出する車速検出手段14と、ステアリング軸3に入力した操舵操作における操舵角を検出する操舵角検出手段4と、ステアリング軸3に入力した操舵操作に対し、操舵補助力の付与あるいは操向輪9FR、9FLの操舵角制御を行う電動モータ5と、ステアリング軸3の回転を操向輪に伝達するステアリングラック部材7と、操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、電動モータ5の駆動制御を行うモータ制御手段とを備える車両用操舵装置とした。
(もっと読む)
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両用操舵装置
【課題】車線の幅変化等の状況変化があっても、車両に目標走行ラインを走行させるための適切な支援ができる車両用操舵装置を提供する。
【解決手段】操舵補助力をモータ6によって発生させる操舵補助モード、及び、走行車線を自動的に維持するための反力トルクをモータ6によって発生させる車線維持支援モードで使用可能な車両用操舵装置100であって、道路の1車線の幅及び当該幅内の自車両の位置を検知する検知装置15と、車線維持支援モードにおいて、前記幅内の目標走行ラインから前記幅の最寄りの一方の端を車両が逸脱しない位置までの距離に対して所要のトルク値が得られる反力トルクの特性を、目標走行ラインを中心線として設定し、設定した特性に基づく反力トルクを操舵機構に付与する制御装置12とを備えたものである。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
車輪代替部材、操舵反力伝達部材および操舵反力伝達装置
【課題】本発明は、運転の模擬の対象として運転模擬装置に組み込まれる自動車、オートバイ等の実車の操舵系に対するその模擬に応じた操舵反力の伝達に供される車輪代替部材、操舵反力伝達部材および操舵反力伝達装置に関し、模擬の対象となる車両に施されるべき改造の大幅な軽減が図られ、かつ多様な車種に対する柔軟な適応を可能とすることを目的とする。
【解決手段】自動車の車輪に代えて前記自動車に取付可能に構成され、かつ前記自動車に関して模擬された操舵反力を前記車輪の軸に与えることによって構成される。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
1 - 20 / 534
[ Back to top ]