
Fターム[3D233CA05]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機 (7,400) | 駆動力取出し機構(クラッチ)の構成 (653)
Fターム[3D233CA05]に分類される特許
21 - 40 / 653
電動パワーステアリング装置
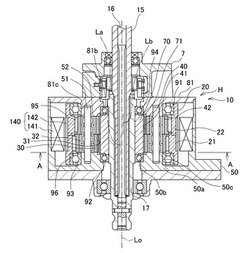
【課題】小型で高い減速比が得られる減速機を用いることにより、搭載スペースを小さくすることが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、ステアリングシャフトの回転軸Loを中心に回転可能に支持された第一部材20と、外周面に外歯歯車71が形成された軸部材70と、外歯歯車71と噛み合う内歯歯車41が内周面に形成された環状部材30と、ハウジングHに固定された円盤部材50と、環状部材30の自転成分のみを円盤部材50に伝達する伝達機構を備える。外歯歯車71は、内歯歯車41と歯数が異なる。第一部材20には、環状部材の中心が回転軸Loから所定の距離になる位置に環状部材30を収容する収容孔21が形成される。環状部材30は、第一部材20に対して相対回転可能な状態で収容孔に収容される。モータ140は第一部材20の外周面のアウタロータ142と、ステータ141を備える。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法

【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
ボールねじ機構及びこれを使用した電動パワーステアリング装置
【課題】転動体循環部材の軸方向の移動を、ナットに固定された部品とねじ軸に設けられた部品とが接触することなく規制できるボールねじ機構を提供する。
【解決手段】外周面に螺旋状のねじ溝9aを形成したねじ軸9と、該ねじ軸9のねじ溝9aに対応するねじ溝15aを内周面に形成するとともに、軸方向に貫通する転動体戻し通路32を形成したナット15と、前記ねじ軸9及び前記ナット15のねじ溝間及び前記転動体戻し通路32内に介装された多数の転動体14と、前記ねじ軸9のねじ溝及び前記ナット15のねじ溝間の転動体14を前記転動体戻し通路32に案内する転動体循環路33fを形成して前記ナットの両端面に配置される転動体循環部材33とを備えたボールねじ機構11であって、前記ナット15のねじ溝15aに係合し、前記転動体循環部材33と連結される固定部材35を備えている。
(もっと読む)
電動パワーステアリング装置
【課題】最大操舵時におけるステアリングギヤハウジングへの衝撃入力を緩和しつつ、組付け作業を簡易化可能な電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングホイールに連結されたピニオン軸と、前記ピニオン軸に連結され、規制される範囲内にてステアリングギヤハウジング29内で往復動作自在なラック軸28と、ラック軸28に設けられたボールジョイント31と、ボールジョイント31に接続されるタイロッド33と、ボールジョイント31を覆うステアリングラックブーツ10とを備える電動パワーステアリング装置であって、ステアリングラックブーツ10は、一方の端部側に設けられた第一衝撃吸収部12と、他方の端部側に設けられた第二衝撃吸収部16とを備え、ラック軸28のストロークエンド近傍にて、第一衝撃吸収部12と第二衝撃吸収部16とを接触するようにした。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
電動パワーステアリング装置
【課題】モータの回転軸とウォーム軸にアライメント不良がある場合、モータケース内側の側面と軸受外との打音の発生やロータマグネットとステータとの磁気吸引力のアンバランスによる作動音の悪化を防止したモータを備えた電動パワーステアリング装置を提供する。
【解決手段】モータ回転軸21は、モータ側ジョイント部61に固定され、モータ側ジョイント部61の軸端部に4個の係合突起67が形成されている。ウォーム軸回転軸24は、ウォーム側ジョイント部32に固定され、ウォーム側ジョイント部32の軸端部には、4個の係合突起37が形成されている。モータ側ジョイント部61とウォーム側ジョイント部32との間には、硬度の異なる部材の2層からなる弾性部材(弾性カップリング)33が挿嵌され、両ジョイント部係合突起37,67に係合する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
電動パワーステアリング装置
【課題】ラックシャフトがストッパに衝突したときに発生するステアリングシャフトの慣性トルクを小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置1は、ステアリングシャフト10と、ラックシャフト20と、ストッパ41と、ステアリングシャフト10にトルクを付与する電動モータ51と、電動モータ51の駆動電流を制御するための指令信号を出力する制御装置54とを備える。制御装置54は、ラックシャフト20がストッパ41に衝突したときにステアリングシャフト10に発生するトルクを慣性トルクとし、慣性トルクとは反対の方向のトルクを補償トルクとし、ステアリングシャフト10に補償トルクを付与する電動モータ51の駆動電流を補償電流とし、補償電流を電動モータ51に供給するための指令信号を補償指令信号として、慣性トルクが発生しているときに補償指令信号を出力する。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
電動パワーステアリング装置
【課題】ボールねじの循環部の外径を大きくすることなく、耐久性を確保することができる電動パワーステアリング装置を提供する。
【解決手段】電動モータと、操舵機構とタイロッドとの間に連結されたラック軸3と、前記電動モータからの動力を前記ラック軸3に伝達する動力伝達機構と、を有し、前記動力伝達機構は、前記ラック軸3に対して連結又は一体化され且つ雄ねじ溝を備えたねじ軸9と、該ねじ軸の周囲に配置され且つ雌ねじ溝を備えたナットと、前記雄ねじ溝と前記雌ねじ溝との間に転動可能な複数の転動体を有するボールねじ機構からなる電動パワーステアリング装置であって、前記ラック軸3のストロークエンド内の少なくとも一方において、前記ナットの荷重支持力減少領域LAが前記ラック軸3と当該ラック軸に接続されたタイロッドの成す平面で定義されるラック軸円周方向の位相位置φp,φp′以外の領域に位置するように設定した。
(もっと読む)
電動パワーステアリング装置
【課題】 電流センサ31が故障した場合でも、操舵アシストの追従性の低下を抑制して、良好な操舵アシストを継続させる。
【解決手段】 異常時制御量演算部80においては、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算する。また、回転角速度推定部82が操舵トルクセンサ21に設けられた回転角度センサ21bの回転角度θoutを微分してモータ回転角速度ωを推定し、補正電圧演算部83がモータ回転角速度ωに比例した補正電圧V1を計算する。電圧値加算部84は、基本電圧V0に補正電圧V1を加算して電圧指令値V*を計算する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵トルクの方向と反対方向にステアリングが回転することに起因して操舵フィーリングが低下することを抑制できる電動パワーステアリング装置を提供する。
【解決手段】マイコン32に、操舵トルクTの方向に応じて符号が決定されるモータ回転角の変化量を積算することにより推定モータ回転角θmを演算する推定モータ回転角演算部41を設けた。マイコン32は、操舵トルクTに基づきδ軸電流指令値Iδ*を演算するとともに、推定モータ回転角θmに従うγ/δ座標系において電流フィードバック制御を実行することによりモータ制御信号を出力する。そして、δ軸電流指令値Iδ*が所定電流値の場合に、駆動回路31を構成するすべてのFET33a〜33fをオフするための停止要求信号S_stを出力する出力停止判定部71を備えた。
(もっと読む)
回転構造体
【課題】第1回転体と固定部品との間における相対的な移動を規制する回転構造体を提供する。
【解決手段】出力軸30と、出力軸30に固定される検出器332と、出力軸30と検出器332とを固定状態とする圧接爪52bと、クリップ50Aと、を備える回転構造体であって、クリップ50Aは、検出器332のハウジング100に固定された円筒部51と、圧接爪52bの先端と、を備え、出力軸30は、軸方向において圧接爪52bの先端が当接する周溝32の上壁面32bを備える。
(もっと読む)
ウォーム減速機及び電動パワーステアリング装置
【課題】長期にわたって、ウォームとウォームホイールとの噛み合い部にグリースを供給して、潤滑不良を防止することができるウォーム減速機及び電動パワーステアリング装置を提供する。
【解決手段】ハウジング11と、ハウジング11により軸受を介して支持されるウォーム20と、ウォーム20に噛み合うウォームホイール21とを備え、ウォーム20とウォームホイール21の噛み合い部Aは、ハウジング11内に充填されたグリースにより潤滑されるウォーム減速機14において、ウォームホイール21の重力方向上側に少なくとも1個の攪拌体Bを配置し、ウォームホイール21が回転することにより、攪拌体Bは、ハウジング11内のグリースを攪拌する。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
電動パワーステアリング装置及びその組立方法
【課題】組立を容易にしながら、ハウジングのサイズの変更や出力が高いモータの搭載時に設計変更を伴うことがなく、さらに半径方向の突出長さを低減して搭載性を向上させることができるコンパクトな電動パワーステアリング装置を提供する。
【解決手段】電動モータ5のグロメット8から突出した給電ハーネス9が、ハーネスガイド60によって制御ユニット19側に略水平に引き出された状態で保持し、制御ユニット側給電部とモータ側給電部との間を略最短距離で接続する。ハーネスガイド60は、モータ取付け部17の矩形溝5cに嵌合部60bが電動モータ5から制御ユニット19に向かって嵌り込む。
(もっと読む)
電動パワーステアリング装置
【課題】操舵感の低下を抑制する効果を長期間にわたり維持することのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、ステアリングシャフトと、電動モータと、電動モータの出力軸に取り付けられたウォームシャフト41と、ウォームシャフト41に噛み合って回転するウォームホイール42とを備える。ウォームホイール42には、同ホイール42を軸方向に貫通する貫通孔44Aが形成され、ステアリングシャフトは、第1シャフト11Aと、第2シャフト11Bと、貫通孔44Aに挿入された状態で第1シャフト11Aと第2シャフト11Bとを連結する連結部材6とを有している。貫通孔44Aは、連結部材6が同ホイール42の周方向に相対移動可能な形状に形成され、ステアリングシャフトには、一端が第2シャフト11Bに連結され、他端がウォームホイール42に連結されるトーションバー52が設けられている。
(もっと読む)
トルクリミッタ、伝達比可変装置及びトレランスリング
【課題】衝撃力が作用した場合に滑りトルクが低下することを抑制できるトルクリミッタ、伝達比可変装置及びトレランスリングを提供する。
【解決手段】トレランスリング64は、帯状の金属板をモータ軸34及びロックホルダ52の周方向に延びる略C字状に湾曲させたリング本体65を備え、同リング本体65に径方向に弾性変形可能なバネ状部66を形成した。そして、バネ状部66をモータ軸34とロックホルダ52との間に圧縮状態で配置されるメイン突起71と、非圧縮状態で配置されるサブ突起72とから構成した。さらに、メイン突起71及びサブ突起72により構成される凹部の全部又は一部にグリースを貯留した。
(もっと読む)
21 - 40 / 653
[ Back to top ]