
Fターム[3D246AA08]の内容
ブレーキシステム(制動力調整) (55,256) | 用途 (1,456) | 電気自動車 (257)
Fターム[3D246AA08]に分類される特許
1 - 20 / 257
車両のブレーキ制御装置
【課題】 リニア制御弁が過度に作動する状態を抑制しつつ、ブレーキ操作に対する制御応答性を適切に確保することができるブレーキ制御装置を提供すること。
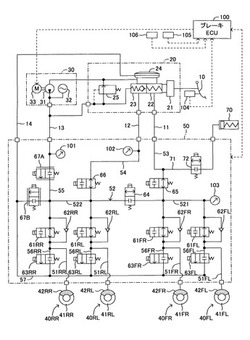
【解決手段】 ブレーキECU100は、ブレーキ操作量に対応する目標液圧P*、増圧機構を構成するアキュムレータ32から供給されるアキュムレータ圧Pacc及び制御圧センサ103によって検出される検出液圧Pxを用い、増圧リニア制御弁67Aについて、目標液圧P*を用いた目標差圧(Pacc−P*)を決定し、この目標差圧(Pacc−P*)と所定に関係にある開弁電流を決定する。又、ECU100は、減圧リニア制御弁67Bについて、目標液圧P*を用いた目標差圧(P*)を決定し、目標差圧(P*)と所定の関係にある開弁電流を決定する。そして、ECU100は、決定したそれぞれの開弁電流を少なくとも脈動発生時に継続して供給する、
(もっと読む)
ブレーキ制御装置

【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
車両盗難防止制御装置
【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
車両のパーキングロック制御装置
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、複数のパーキングロック機構のうち、何れか一方のパーキングロック機構を作動させ、一方のパーキングロック機構のみを作動させた場合に車両が移動すると推定又は検出されたときは、他方のパーキングロック機構を作動させることとした。
(もっと読む)
車体挙動安定化装置
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
車両の制動制御装置
【課題】機械式ブレーキによる制動トルクの応答遅れに拘らず合算トルク(MGトルク+ECBトルク)が適切に制御されるようにしてすり替えショックを抑制する。
【解決手段】すり替え過渡時に車両の制動トルクT2が要求制動トルクT1からずれた場合に、そのずれ(制動トルク偏差ΔT)が小さくなるようにモータジェネレータMGによる制動トルク(MGトルク)がフィードバック補正されるため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らず要求制動トルクT1に応じて合算トルク(MGトルク+ECBトルク)が適切に制御されるようになり、車両の制動トルクT2の瞬間的な低下によるすり替えショックが抑制される。特に、モータジェネレータMGによる制動トルク(MGトルク)は応答性に優れているため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らずすり替えショックを適切に抑制することができる。
(もっと読む)
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両用制動力制御装置
【課題】車輪の制動力低下量の過不足をきたすことなく制動スリップを効果的に低減すること。
【解決手段】摩擦制動と回生制動との協調制御により各車輪の制動力を制御する車両用制動力制御装置であり、アンチスキッド制御が開始されると、当該時点に於いて発生している回生制動力とアンチスキッド制御による制動力低下要求量との大小関係に応じて、摩擦制動力の目標増減量を決定し、回生制動力を低減すると共に目標増減量に基づいて摩擦制動力を増減する。回生制動力が制動力低下要求量よりも大きく、制動スリップが高いときには、摩擦制動力の目標増減量を0に決定する。
(もっと読む)
車両用制御装置
【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
パーキング制御装置
【課題】電動車両の駐車状態を安定的に維持する。
【解決手段】電動車両の制御システム21は、Pレンジ指示器19からの信号に応答してアクチュエータ24を駆動し、パーキングロック装置をロック状態にするP基本制御手段51を備える。制御システム21は、充電端子15に充電ケーブル17aが接続されている時に、ロック状態を保持するためのP保持制御手段52を備える。P保持制御手段52は、電源リレー31によりアクチュエータ24への電力供給を遮断し、ロック状態の解除を阻止する。この結果、充電の間中、駐車状態が安定的に維持される。さらに、制御システム21は、自動的にロック状態を提供するP自動制御手段53を備えることができる。制御システム21は、パーキングロックに代えて、ニュートラルレンジとパーキングブレーキとを提供する他レンジ制御手段54および制動制御手段43を備えることができる。
(もっと読む)
電動車両用制御装置
【課題】電動車両の電池を充電するときに、電動車両の移動を確実に阻止する。
【解決手段】電動車両の高圧電池11は、外部電源19からケーブル18を介して充電することができる。ケーブル18が接続されたときに電動車両の電源がオン状態である場合、電動車両は自動的にオフ状態に切換えられる。また、ケーブル18が接続されたときに駐車処理がされていない場合には、駐車処理が完了するまで、充電を待機させる。ケーブル18が接続されたときに駐車処理がされていない場合、パーキングECU22は、自動的に電気的な制御によって駐車処理を行う。駐車処理には、パーキングロック機構14をロック状態に制御すること、および/または、ブレーキ装置15をパーキングブレーキとして作動させることが含まれる。
(もっと読む)
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
【課題】反力シミュレータ部材の付勢力による跳ね返り抵抗感を抑制してより一層良好な操作フィーリングを得る。
【解決手段】入力軸4の入力によりシミュレータ作動ピストン14が作動してシミュレータ作動液圧室15内に発生した液圧で、第1および第2反力シミュレータピストン18,
20が下動する。このとき、第1および第2反力シミュレータスプリング19,21の付
勢力で液圧室15内の液圧が入力に基づいた液圧となり、この液圧がピストン14を介して入力軸4に反力として伝達される。ピストン20の下動でその摺動抵抗力付与部材変形作動部20aが反力シミュレータピストン摺動抵抗力付与部材29を押圧変形する。これにより、ピストン20の作動に応じて変化する摺動抵抗力がピストン20に付与される。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合する場合の操作性を向上させる。
【解決手段】アクセルペダル8の操作位置Sに応じて車両の加減速度を制御すると共に、増加操作の場合と減少操作の場合とで、操作位置Sに応じた加減速度の制御特性を変化させる。増加操作の場合には、アクセルペダル8の操作位置Sが非操作位置S0から最大操作位置SMAXまで増加するときに、目標加減速度Gが0から予め定められた正側の最大加減速度GMAXまで増加する往路制御特性に従う。減少操作の場合には、アクセルペダル8の操作位置Sが減少操作検知時操作位置Sdから非操作位置S0まで減少するときに、目標加減速度Gが減少操作検知時加減速度Gdから予め定められた負側の最小加減速度GMINまで減少する復路制御特性に従う。
(もっと読む)
電動ブレーキ制御システム
【課題】車両電源の失陥によりブレーキ操作中に電動アクチュエータへの電源電圧が低下した際、急激なブレーキ液圧低下の抑制と急激なペダル踏力増加の緩和を達成すること。
【解決手段】ドライバーによるペダル操作量を検出し、倍力モータ24をアシスト制御することで、倍力されたブレーキ液圧をマスタシリンダ68により発生させる電動倍力ブレーキ装置6を有する。この電動ブレーキ制御システムにおいて、電源電圧検出回路10と、コントローラ21と、を備える。電源電圧検出回路10は、車両電源1の電源電圧を検出する。コントローラ21は、車両電源1の失陥によりブレーキ操作中に倍力モータ24への電源電圧Vが低下した際、検出される電源電圧Vが、低電圧判定基準値V1になってから倍力機能が停止する最低作動電圧値V0になるまでの間に、ブレーキ液圧を徐々に低下させるように倍力モータ24を制御する(図4)。
(もっと読む)
車両のパーキングロック制御装置
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、いずれか一方のパーキングロック機構を作動させると共に、推定又は検出された車両の移動が所定以上移動するときは、他方のパーキングロック機構に接続されたモータにより車両の移動を抑制するトルクを発生させることとした。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
車両およびその制御方法
【課題】TCS制御を行い、駆動ホイールのスリップ量が設定数値以下に落ちてTCS制御を終了する時点で、モータの出力トルクが急に増加して発生する駆動ホイールのスリップと駆動系の振動を減少させることができる車両およびその制御方法を提供する。
【解決手段】本発明の車両は、駆動ホイールへのトルク伝達用モータを制御するモータ制御器、および前記駆動ホイールが地面とスリップすると判断される場合には、TSC制御を行い、前記駆動ホイールに伝達される回転力を減少させ、前記駆動ホイールが地面とスリップしないようにし、スリップが発生しないと判断される場合には、TCS制御を解除し、前記モータから前記駆動ホイールに伝達されるモータトルクを設定されたラインを沿って徐々に増加させるTCS制御器、を含むことを特徴とする。
(もっと読む)
電動ブレーキ装置
【課題】ピストン及びその周辺部品の組付作業を容易にして組付性を向上させること。
【解決手段】前方に配置される第1スレーブピストン88bと、第1スレーブピストン88bの後方に配置される第2スレーブピストン88aと、前記第1スレーブピストン88bと前記第2スレーブピストン88aとの離間位置を規制する規制手段100と、前記第1スレーブピストン88bと前記第2スレーブピストン88aとを離間する方向に付勢する第2スプリング96aとを備え、連結ピン79を介して、第1スレーブピストン88b、規制手段100、第2スプリング96a、及び、第2スレーブピストン88aを一体的に組み付けて構成した。
(もっと読む)
1 - 20 / 257
[ Back to top ]