
Fターム[3D246AA09]の内容
ブレーキシステム(制動力調整) (55,256) | 用途 (1,456) | ハイブリッド車両 (439)
Fターム[3D246AA09]に分類される特許
101 - 120 / 439
車両用ブレーキ装置
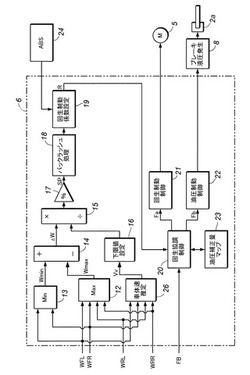
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
車両の制駆動力制御装置

【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
リニアソレノイドバルブの制御装置
【課題】リニアソレノイドバルブの制御装置における高応答性を実現するための初期駆動電流を正確に学習する制御を行う。
【解決手段】目標圧Paとブレーキ圧Paとの偏差δPに応じて油圧フィードバック制御器12により求めた油圧フィードバックデューティ比Dyfと、初期デューティ学習器16により、増圧用バルブ5の上下流の差圧ΔPに基づいて求めたバルブ初期特性による初期駆動量Dy0及び修正量ΔDyとにより、リニアソレノイドバルブからなる増圧用バルブ5を制御する駆動デューティ比Dyを決定する。リニアソレノイドバルブの安定動作時に初期駆動量を求め、その初期駆動量をフィードフォワード制御の指令値としてリニアソレノイドバルブを制御することができ、リニアソレノイドバルブが動き始めるための初期駆動量を確保した通電制御を行うことができる。
(もっと読む)
自動車
【課題】インバータの複数のスイッチング素子の一部を含む閉回路が形成される閉回路異常が生じている状態でイグニッションオフされた後に、その閉回路異常に起因する不都合が生じるのを抑止する。
【解決手段】閉回路異常が生じている状態でイグニッションスイッチ60がオフされたときには、駆動輪39a,39bおよび従動輪39c,39dに制動力が付与されるようブレーキアクチュエータ42を制御する。これにより、閉回路異常が生じている状態でイグニッションスイッチ60がオフされた後に、閉回路に電流が流れるのを抑止することができ、閉回路異常に起因する不都合が生じるのを抑止することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
液圧ブレーキシステム
【課題】制御圧供給状態からマニュアル圧供給状態に確実に切換可能とする。
【解決手段】マニュアル圧Pmから制御圧Psを引いた差圧Δが切換許可範囲内にある場合にマニュアル圧供給状態に切り換えられる場合において、切換許可範囲の上限値がブレーキペダルの操作速度に基づいて決定される。ブレーキ操作速度に基づいて上限値ΔPth1が決定され、時点t0に差圧ΔPが上限値以下となり、マニュアル状態切換条件が成立する。そして、時点t0〜t2までの間に、マニュアル状態切換プログラムが実行されると、マニュアル圧供給状態に切り換えられる。従来のように、上限値がブレーキ操作速度の大小に関係なく一定の値ΔPthiに決定される場合に比較して、マニュアル状態切換条件が成立している期間が長くなり、かつ、成立する時期が早くなる。その結果、より早期に、確実にマニュアル圧供給状態に切り換えることが可能となる。
(もっと読む)
車両の制御装置
【課題】クラッチの耐久性を向上可能な車両の制御装置を提供すること。
【解決手段】アクセルヒルホールド時に、クラッチを開放し、ブレーキ制御手段によって車両停止状態を維持する締結要素保護制御を、アクセルペダル開度に基いて設定された要求トルクが勾配負荷トルク相当値に基づいて設定された上限トルクと下限トルクの範囲内か否かで判断し、要求トルクが上限トルクと下限トルクの範囲外となったときは、締結要素保護制御を解除する。
(もっと読む)
電動車両の制御装置
【課題】回生制御中において変速制御中または変速制御終了時にブレーキ踏み込み操作があっても、スリップ締結に伴う変速ショックの発生を防止することができる電動車両の制御装置を提供する。
【解決手段】統合コントローラは、モータ/ジェネレータの回生制御中において自動変速機が変速制御中であるか否かを判断する(ステップSA1)。ステップSA1の判断結果がYESの場合にはブレーキ踏力が増加しているか否か、つまり、ブレーキ踏み込み操作があるか否かを判断する(ステップSA2)。ステップSA2の判断結果がYES、つまり、ブレーキ踏み込み操作があると判断した場合には、モータ/ジェネレータの回生トルクの増加を制限してブレーキ制動を行う(ステップSA3)。具体的には、各輪のブレーキユニット(メカブレーキ)を駆動して、各輪の機械制動を行う。
(もっと読む)
オートマチックトランスミッション制御装置
【課題】摩擦ブレーキと回生ブレーキとを協調させて車両を制動する協調回生ブレーキが備えられた車両において、車両の減速中にショックが発生することを防止可能なオートマチックトランスミッション制御装置を提供する。
【解決手段】摩擦ブレーキと回生ブレーキとを協調させて車両を制動する協調回生ブレーキが備えられた車両のオートマチックトランスミッションを制御する装置であって、減速中にダウンシフトの開始タイミングになったか否か判定するダウンシフト判定部(S2)と、ダウンシフトの開始タイミングになったときは、通常のシフト時間で変速した場合に、モータージェネレーターのトルクの低下に合わせて摩擦ブレーキの制動力を上昇できるか否かを判定する摩擦制動上昇判定部(S5)と、上昇できないと判定されるときは、通常よりも長い時間をかけて変速するようにダウンシフトを開始するシフト制御部(S6)と、を備える。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
車両用制動力制御装置
【課題】ドライバーが通常走行で多用する低い制動目標値のとき、同じペダル踏力によるブレーキ操作に対し制動目標値が異なるということを低減し、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、ペダル踏力算出部60と、ペダルストロークセンサ18と、第1目標制動力算出部65と、第2目標制動力算出部66と、寄与度設定部63と、目標制動力算出部67と、を備える。寄与度設定部63は、目標制動力が低いと推定されるときほどペダル踏力に基づく第1目標制動力の寄与度合い(1−β)を、ペダルストロークに基づく第2目標制動力の寄与度合いβより大きく設定する。目標制動力算出部67は、寄与度合い(1−β),βに応じて第1目標制動力分と第2目標制動力分を算出し、第1目標制動力分と第2目標制動力分の加算により最終の目標制動力を得る。
(もっと読む)
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
車両の制御装置
【課題】回生制動中にショックの発生を抑制する車両の制御装置を提供する。
【解決手段】制動時に、モータジェネレータによって発生する回生制動力とホイールブレーキによって発生する摩擦制動力との少なくとも一つによって車両を制動させる車両の制御装置である。統合コントローラは、回生制動中に回生トルクおよび摩擦制動トルクを算出し、回生制動中に変速機で変速を行っている場合に、回生トルクに基づいて変速機出力トルクを算出し、摩擦制動トルクがゼロではない場合に、トルクフェーズ中の前記変速機出力トルクの変動を相殺する摩擦制動トルク補正値を算出し、摩擦制動トルク補正値に基づいて、ホイールブレーキで摩擦制動力を発生させる。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
車両用制動制御装置
【課題】本発明は、精度良くブレーキペダルストロークセンサのゼロ値を示す基準値の補正を行うことのできる車両用制動制御装置を提供する。
【解決手段】初期学習許可判定にて初期学習開始条件が成立し、更にイグニッションスイッチがON後(i)に初期学習開始条件が成立すると初期学習を開始する(ii)。初期学習を継続し、ブレーキペダルストロークセンサの基準値がブレーキペダルのゼロ点の初期学習終了範囲内となるまで初期学習を行う(iii)。また、ブレーキペダルストロークセンサの基準値が初期学習終了範囲内で初期学習時間維持されると初期学習を終了する(iv)。正規学習開始条件が成立し、正規学習開始条件が成立すると正規学習を行う(v)。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時に加圧分を補償するポンプモータを停止させる際、車両の減速度が低下することによる違和感を解消すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスタシリンダ13と、ホイルシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を、マスタシリンダ圧による基本液圧分と回生制動力による回生分の総和で達成し、不足する回生分をVDCブレーキ液圧ユニット2による加圧分で補償する制御を行う。加えて、回生協調ブレーキ制御にてVDCモータ21を停止させた際、差圧弁であるM/Cカットソレノイドバルブ25,26による差圧制御を、VDCモータ21のモータ回転数に基づいて行う。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置に関し、エネルギーの有効利用とブレーキ性能の向上とを両立させる。
【解決手段】回生発電により車輪11に回生制動力を付与するモータ装置1と、車輪11に摩擦制動力を付与するブレーキ装置2とが設けられた車両の制動制御装置において、モータ装置1で発電された電力の充電先であるバッテリ9の充電量を検出する検出手段7aと、バッテリ9の電力で駆動されブレーキ装置2の摩擦面に空気を送風する送風手段3とを備える。
また、バッテリ9の電力で駆動され送風手段3が送風する前記空気を冷却する冷却手段4,5と、検出手段7aで検出された前記充電量に応じて、送風手段3及び冷却手段4,5を駆動する制御手段7cとを備える。
(もっと読む)
車両用制動装置
【課題】従来の制動装置を大幅に変更することなく、回生協調制御を実行可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36およびセカンダリピストン33が移動可能に設けられており、これにより、プライマリ室PCおよびセカンダリ室SCが形成されている。プライマリ室PCとABSアクチュエータ5との間には、差圧弁91が設けられている。パワー液圧源7からの駆動液圧が駆動室DCに供給されると、プライマリピストン36およびセカンダリピストン33がシリンダ部311内を移動し、プライマリ室PCおよびセカンダリ室SCに液圧が発生する。プライマリ室PCの液圧は差圧弁91によって減圧され、初期制動において、後輪側のホイルシリンダWC3,WC4の液圧は、前輪側のホイルシリンダWC1,WC2よりも低く設定される。
(もっと読む)
101 - 120 / 439
[ Back to top ]