
Fターム[3D246AA09]の内容
ブレーキシステム(制動力調整) (55,256) | 用途 (1,456) | ハイブリッド車両 (439)
Fターム[3D246AA09]に分類される特許
121 - 140 / 439
車両用制動装置
【課題】従来の制動装置を大幅に変更することなく、回生協調制御を実行可能な車両用制動装置の提供。
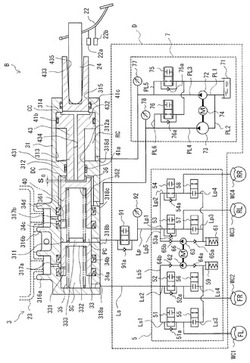
【解決手段】シリンダ部311内には、プライマリピストン36およびセカンダリピストン33が移動可能に設けられており、これにより、プライマリ室PCおよびセカンダリ室SCが形成されている。プライマリ室PCとABSアクチュエータ5との間には、差圧弁91が設けられている。パワー液圧源7からの駆動液圧が駆動室DCに供給されると、プライマリピストン36およびセカンダリピストン33がシリンダ部311内を移動し、プライマリ室PCおよびセカンダリ室SCに液圧が発生する。プライマリ室PCの液圧は差圧弁91によって減圧され、初期制動において、後輪側のホイルシリンダWC3,WC4の液圧は、前輪側のホイルシリンダWC1,WC2よりも低く設定される。
(もっと読む)
マスタシリンダ装置

【課題】 実用性の高いマスタシリンダ装置を提供することを課題とする。
【解決手段】 本発明のマスタシリンダ装置110は、前方が閉塞され、内部を前方室と後方室とに分ける隔壁を有するハウジング300と、前方室内で、作動液を加圧するための加圧室R1と高圧源118から作動液が導入される入力室R3とをそれぞれ区画する加圧ピストン302と、後方室内で、操作力によって前進する入力ピストン306と、その前進量に応じた操作反力を付与する操作反力付与機構446と、隔壁を貫通して配設され上記ピストンの一方に基端部が固定され、他方と先端部が上記前進のない状態で離間する伝達ロッド340とを備え、先端部が他方に当接しない状態で、高圧源の圧力に依存した加圧室の作動液の加圧が実現され、当接した状態で、高圧源の圧力に加えて操作力にも依存した加圧室の作動液の加圧が実現されるように構成されていることを特徴とする。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、パワー液圧源7からの駆動液圧が入力可能な駆動室DCが形成されている。プライマリ室PCは吸収リザーバ91の貯留室913に接続され、駆動室DCは吸収リザーバ91の背圧室914に接続されている。プライマリ室PCと貯留室913との間には、常閉型のカット弁92が形成されている。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて、パワー液圧源7により駆動液圧を発生させ、駆動室DCと背圧室914とに供給する。
(もっと読む)
車両用ブレーキ装置
【課題】自動制動制御機能により制動力を発生させるときに、回生ブレーキ装置へ制動力を配分して従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】マスタシリンダ、ポンプ、および液圧制御ユニットを有する液圧ブレーキ装置と、回生ブレーキ装置と、制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材の操作量に応じたドライバー目標制動力FT2を演算する手段と、ドライバー目標制動力FT2とは別に制動制御装置自身が各車輪の補正制動力FD2を設定する手段と、各車輪について、ドライバー目標制動力FT2および補正制動力FD2のうち大きい側を選択し基礎液圧制動力FB2を減算して補正後目標制動力FU2とする手段と、補正後目標制動力FU2を、各車輪の制御液圧制動力FC2と各駆動輪の回生制動力FG2とに配分制御する手段と、を有する。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、入力移動体38との間にアイドル室ACが形成されており、入力移動体38の後方には、支持壁42との間に駆動室DCが形成されている。初期制動時においては、アイドル室ACとパワー液圧源7との間のカット弁92を開状態とし、パワー液圧源7による駆動液圧を発生させずに、入力移動体38をプライマリピストン36に当接させないように前進させる。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて発生させた駆動液圧を駆動室DCに供給する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
ブレーキ制御システム
【課題】ブレーキ操作量検出装置を使用する複数の制御装置を有するブレーキ制御システムにおいて、ブレーキ操作量検出装置を1つにするブレーキ制御システムを提供する。
【解決手段】ブレーキ操作量に基づいて、マスタシリンダ圧を制御するマスタシリンダ圧制御装置と、各車輪のホイールシリンダ圧を制御するホイールシリンダ圧制御装置と、マスタシリンダ圧を算出するための信号を出力する一つのマスタシリンダ圧検出装置と、を有し、マスタシリンダ圧制御装置は、一つのマスタシリンダ圧検出装置で出力された出力結果に基づいてマスタシリンダ圧を制御し、ホイールシリンダ圧制御装置は、一つのマスタシリンダ圧検出装置で出力された出力結果に基づいてホイールシリンダ圧を制御し、一つのマスタシリンダ圧検出装置は、ホイールシリンダ圧制御装置と電気的に接続されてホイールシリンダ圧制御装置から電源電圧が供給され、マスタシリンダに設置される。
(もっと読む)
電動車両の制御装置
【課題】回生協調ブレーキ制御時、旋回度合いに対応して車両挙動の安定性と回生量の確保との両立を図る。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段と、回生トルク制限手段S14→S15と、閾値決定手段S13と、を備える。回生トルク制限手段は、回生協調ブレーキ制御時、前後車輪速差が、決定された閾値より大きくなると回生トルクを制限する。閾値決定手段は、回生協調ブレーキ制御中における車両の旋回度合いを表す旋回状態量が、旋回度合いが高いことを表すほど前記閾値を下げた値に決定する。
(もっと読む)
液圧ブレーキ制御装置
【課題】 ドライバのブレーキ操作により発生したマスタシリンダ圧をポンプ増圧してホイルシリンダ圧を制御する際、良好なペダルフィールを実現できる液圧ブレーキ制御装置を提供する。
【解決手段】 制御弁27が設けられマスタシリンダM/CとポンプPの吸入側とを接続する第3ブレーキ回路(管路26,30)と並列に、調圧部(ストロークシミュレータバルブ16、オリフィス17)とストロークシミュレータ14とが直列に並ぶ管路15を設けた。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両のアイドルストップ制御装置
【課題】 アイドルストップ車両において、登坂路におけるずり下がり防止を図る。
【解決手段】 運転者のブレーキ操作と車速がアイドルストップ移行条件車速閾値以下となることを含む所定のアイドルストップ条件が成立した際にエンジンを自動停止する車両のアイドルストップ制御装置において、路面勾配の大きさを検出する勾配センサ25と、運転者のブレーキ踏み込み量に応じた制動力に対し制動力増加量を付与するブレーキユニットBUFL,BUFR,BURL,BURRと、登坂路でエンジンEが自動停止した場合、検出された路面勾配が大きいほど制動力増加量をより大きくする制動力増加量設定部10cと、を備える。
(もっと読む)
自転車用回生制動制御装置
【課題】ブレーキ回生を行う制御装置において、回生制動と機械制動との間で違和感を生じにくくする。
【解決手段】回生制動制御部74は、自転車に装着可能なフロントブレーキシステムとリアブレーキシステムの変位に関連してモータ60を制御する。回生制動制御部74は、右ブレーキセンサと、左ブレーキセンサと、第1制御部75と、を備えている。右ブレーキセンサは、フロントブレーキシステムの移動位置を検出する。左ブレーキセンサは、リアブレーキシステムの移動位置を検出する。第1制御部75は、フロントブレーキシステムおよびリアブレーキシステムが変位すると、右移動位置と左移動位置とにより得られた加算位置に応じた第1回生制動力を発生するようにモータ60を制御する。
(もっと読む)
車両の制動制御装置
【課題】 機械式および電気式のブレーキ装置により車両を制動させるときにブレーキペダルにおける反力変化を適切に生じさせる車両の制動制御装置を提供すること。
【解決手段】 電子制御ユニット26は、インホイールモータ15〜18およびブレーキ機構21〜24による制動トルクの制御中において、ブレーキセンサ28によって検出されたペダル操作量を入力し車両Veを制動するために必要な要求制動トルクを決定する。そして、ユニット26は、要求制動トルクが所定値よりも大きければ、モータ15〜18による制動トルクを周期的に変動させる。一方、ユニット26は機構21〜22が発生する制動トルクをモータ15〜18による周期的に変動する制動トルクと逆位相となるように周期的に変動させる。これにより、ユニット26は機構21〜24に機械的に接続されたペダルにおける反力を周期的に変動させる。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
電動制動装置
【課題】正常作動時のペダルシミュレート機能を有しつつブレーキ液圧を運転者の操作入力にかかわらず自動制御でき、かつ回生協調制御し得ると共に構造を簡素化し、異常時に四輪液圧バックアップを可能にする。
【解決手段】マスターシリンダ5に、ストロークに応じて反力付与されたブレーキペダル1の空走後に変位し得る大径の第1ピストン6と、第1ピストンに向けてばね付勢される小径の第2ピストンとを設け、ブレーキペダルの変位検出値に応じてスレーブシリンダ15を電動モータ17で駆動してブレーキ液圧を発生し、両ピストン間の第1液室13を介し、また第2ピストンにより第2液室の液圧を増大して各ホイールシリンダにブレーキ液圧を供給する。システム異常時には、ブレーキペダルにより両ピストンを機械的に変位させて、ピストンの径違いに応じて前後輪にブレーキ液圧を供給することができる。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
車両用ブレーキ制御装置
【課題】摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行うとともにABS制御を実行する車両用ブレーキ制御装置において、ABS制御実行中においてABS制御に悪影響を与えることなくエネルギー効率を高めることができるものの提供。
【解決手段】この車両用ブレーキ装置は、前輪側の制動力を、摩擦制動力である液圧制動力(前輪側VB液圧分Fvbf+リニア弁差圧分Fval)と、回生制動力Fregとにより制御し、後輪側の制動力を、液圧制動力(後輪側VB液圧分Fvbr)のみにより制御することで回生協調ブレーキ制御を実行する。そして、この装置は、ABS制御実行中において、限界回生制動力Freglimitを、回生制動対象車輪である前2輪に働いた場合に前2輪にロックが発生しない範囲内の制動力の最大値に設定し、回生制動力Fregを同限界回生制動力Freglimitを超えないように調整する。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
121 - 140 / 439
[ Back to top ]