
Fターム[3D246HA52]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 運転者の意図 (93)
Fターム[3D246HA52]に分類される特許
1 - 20 / 93
車輌停止前後のペダル作動状態に基づき自動制動の解除を判断する車輌
車両用制動力制御装置
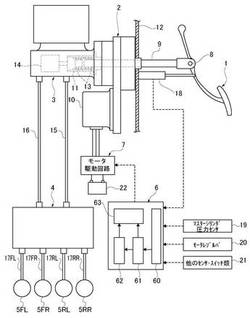
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
自動走行制御装置

【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両用制御装置
【課題】車両の機能制限を利用者に認識させながら、走行可能距離を延長する。
【解決手段】選択処理手段14bは、電池6の残存電力量の低下を抑制するための複数の省エネルギ制御モードを車両の利用者に提示する。選択処理手段14bは、それらの省エネルギ制御モードの実行、または却下の選択を利用者に求める。電力制御手段14aは、利用者によって選択された省エネルギ制御モードが実行されるように、複数の制御装置9、10、12を制御する。省エネルギ制御モードの提示は、残存電力量が所定値を下回る場合に、または車両が目的地まで到達できないと判定される場合に実行される。この構成によると、車両の機能が制限されることを車両の利用者に認識させることができる。この結果、利用者の不満を抑えながら、大幅な機能制限が可能となり、車両の走行可能距離を延長することができる。
(もっと読む)
運転操作予測装置
【課題】ドライバのハンドル回避操作前の準備操作を検出することにより、限定的な状況下でのドライバのハンドル回避意思を高精度に予測する。
【解決手段】外部環境イベント及び運転操作イベントを検出し(S2)、外部環境イベントと運転操作イベントとの時間関係にルールが反応したとき、そのルールの結論に応じて重みを加算或いは減算することにより、ハンドル回避意思推定値Hを計算する(S3)。そして、制御介入の必要性を判定し(S4)、制御介入の必要性がある場合、ハンドル回避意思推定値Hの値を参照する(S5)。その結果、H>0の場合には、ドライバのハンドル操作による回避意思が高いものと判断して制御介入しない或いは介入を遅らせる等して制御介入を自重し(S6)、一方、H≦0の場合には、ドライバのハンドル操作による回避意思が低いものと判断してシステムによるブレーキ介入を実行させる(S7)。
(もっと読む)
車両用制動制御装置
【課題】ドライバーの意図に応じて的確に自動制動を解除可能な車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に自車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両のブレーキ装置を制御して自動的に制動力を発生させる自動制動手段と、自車両のドライバーによる自車両のアクセルペダルの操作頻度に基づいて、自動制動手段による自動的な制動力の発生を停止する自動制動解除手段とを備えることを特徴とする車両用制動制御装置である。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
ブレーキ制御装置
【課題】電動倍力装置を用いたブレーキ制御装置において、ブレーキペダルの操作によりシステム起動したときのHSA制御実行中にもブレーキペダルの解放を適切に検知する。
【解決手段】ブレーキペダルBの操作に基づき、電動モータ40を制御し、プライマリピストン10を推進してマスタシリンダ2で液圧を発生させる。車両が坂道で停止し、ブレーキペダルBを解放したとき、液圧を所定時間保持した後、減圧することにより坂道発進を補助する。ストロークセンサ80及び液圧センサ72の0点学習前にHSA制御を実行した際、マスタシリンダ2の液圧について、HSA保持液圧と、ブレーキペダルBの操作による入力ピストン32の変位量に対応する目標液圧とを比較し、目標液圧がHSA保持液圧以下の場合又はブレーキスイッチ81がオフとなった場合にブレーキペダルBの解放と判断し、マスタシリンダ2の液圧をHSA保持液圧で所定時間保持した後、減圧する。
(もっと読む)
自動制御装置
【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
目標軌道算出装置
【課題】直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める。
【解決手段】カメラ撮影部2の撮影で検出される障害物αが2円軌道モデルで算出された目標軌道に存在する場合に、軌道計算部5により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道を算出して決定し、障害物αを回避して車両1の自動駐車等を行なう。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
車両用制御装置
【課題】乗員により緊急停止操作が実施された場合の安全性の向上を図る。
【解決手段】乗員により緊急停止操作が実施された場合、エンジン制御装置50への給電を停止するように車両バッテリとエンジン制御装置50との間に設けられたIGリレー31を制御するとともに(S104)、安全のための装備を制御する安全系制御装置60〜65への給電を維持するように車両バッテリと車両に搭載された安全のための装備を制御する安全系制御装置60〜65との間に配設されたIGEリレー32を制御する(S106)。
(もっと読む)
車両の坂道発進支援ブレーキ装置およびその制御方法
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
車両の退避走行制御装置
【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
1 - 20 / 93
[ Back to top ]