
Fターム[3D246HA84]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体傾斜 (132)
Fターム[3D246HA84]の下位に属するFターム
ロール (46)
Fターム[3D246HA84]に分類される特許
1 - 20 / 86
制動制御装置
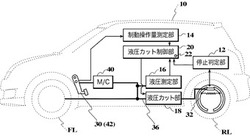
【課題】 ブレーキからの異音発生を防止すること。
【解決手段】 車両10が停止しているか否かを判定する停止判定部12と、ブレーキ操作部材30の制動操作量を測定する制動操作量測定部14と、ドラムブレーキ32へ供給される液圧を測定する液圧測定部16と、前記ドラムブレーキ32への所定圧以上の前記液圧をカットする液圧カット部18と、前記液圧カット部18の動作を制御する液圧カット制御部20とを備え、この液圧カット制御部20が、前記車両10の停止後で、前記制動操作量が所定値を超え、かつ、前記液圧が前記所定圧を超えた際に、前記液圧カット部18を動作させて前記所定圧以上の液圧をカットさせる停止時高圧抑制制御22を備えた。
(もっと読む)
手動変速機付車両の坂道発進補助制御装置

【課題】シフトポジションセンサを用いることなく坂道でエンストした手動変速機付車両のずり下がりを抑制して運転者によるブレーキ操作や再始動操作を容易化することができる手動変速機付車両の坂道発進補助制御装置を提供すること。
【解決手段】坂道で停車した手動変速機付車両(MT車)のずり下がりが検知されると加圧ポンプを駆動してブレーキ液圧を車輪4L,4R,5L,5Rのブレーキ装置16に供給する坂道発進補助制御装置(ECU)13において、所定の勾配以上の坂道でMT車のブレーキペダル8の踏み込みによる停車が検知された後、ブレーキペダル8の踏み込みが解除され、アクセルペダル9の踏み込みが検知されて車速が所定値以上となった時点でエンジン回転数が所定値以下であるときには、加圧ポンプを駆動してブレーキ液圧をブレーキ装置16に供給してブレーキ力を発生させる。
(もっと読む)
車両の走行支援装置及び車両の走行支援方法
【課題】降車している運転手が車両を押し歩きする場合に、該押し歩きを支援することができる車両の走行支援装置及び車両の走行支援方法を提供する。
【解決手段】自動二輪車両の制御装置は、自動二輪車両の停車中に運転手が降車していると判定された第1のタイミングt1後に、該判定結果が維持された状態で自動二輪車両の移動開始が検知された場合(第3のタイミングt3)、車載のエンジンのエンジン回転数NEに基づく駆動力を駆動輪に伝達させる支援制御を行う。
(もっと読む)
車両制御装置
【課題】低コストで構成可能でありながら適切なタイミングで衝突安全装置を動作可能とする車両制御装置を提供する。
【解決手段】自車両と物体との衝突の危険性を低減するべく車両を制御する車両制御装置であって、物体を検出する物体検出手段と、物体と自車両との衝突の危険性が高いか否か判定する衝突判定手段と、衝突判定手段により衝突の危険性が高いと判定された場合、衝突の危険性を低減するための衝突安全装置を作動させる衝突安全装置制御手段と、自車両の車体のピッチ角の経時変化量をピッチ角変化量として算出するピッチ角変化量算出手段と、ピッチ角変化量に基づいて衝突安全装置の動作を抑制または停止する動作抑制手段とを備える、車両制御装置である。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
動力車両の制動制御装置
【課題】機体停止操作時にもクラッチペダルの踏み込みを行わずともエンジン停止のない作業車両を得ようとする。
【解決手段】エンジン5からの回転動力を変速装置11,12を介して車軸50に伝達し、該車軸50にはブレーキ51を備えた作業車両であって、変速装置11,12の前段又は後段にエンジン動力または変速動力を入り切りする主クラッチ手段38,39を備え、ブレーキ51L,51Rを連動するブレーキペダル94L,94Rの踏込み操作に基づき前記クラッチ手段38,39をクラッチ切り状態に連動し、車体1の車体走行速度を検出する車速検出センサ54を設け、前記ブレーキペダル94L,94Rの操作後、車体走行速度Vが予め設定した設定速度Vs以下を検出すると、前記ブレーキ51L,51Rを制動する制動アクチュエータ95LC,95RCに作動出力する制御部70を設ける。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両停止保持装置
【課題】パーキングロック機構のロック状態を解除した時に、車両の予期せぬ移動を防止する車両停止保持装置の提供。
【解決手段】車両が所定の条件を満足した時、コントローラ3は車両が停止状態にあると判断し、シフト機構13によってシャフトロック機構14を作動させ、自動変速機1のアウトプットシャフト11を機械的にロックし、車両を停止状態で保持する。シャフトロック機構14によって、車両が停止保持された状態にある場合において、運転者がアクセルペダル97を操作すると、コントローラ3はシャフトロック機構14によるアウトプットシャフト11のロックを解除するとともに、ブレーキECU5に対して加圧要求を発する。加圧要求を受けたブレーキECU5は、液圧ブレーキ装置6を作動させて、ブレーキペダルの操作に拘わらず、ブレーキ液圧をホイルシリンダに供給する。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
自動車
【課題】インバータの複数のスイッチング素子の一部を含む閉回路が形成される閉回路異常が生じている状態でイグニッションオフされた後に、その閉回路異常に起因する不都合が生じるのを抑止する。
【解決手段】閉回路異常が生じている状態でイグニッションスイッチ60がオフされたときには、駆動輪39a,39bおよび従動輪39c,39dに制動力が付与されるようブレーキアクチュエータ42を制御する。これにより、閉回路異常が生じている状態でイグニッションスイッチ60がオフされた後に、閉回路に電流が流れるのを抑止することができ、閉回路異常に起因する不都合が生じるのを抑止することができる。
(もっと読む)
発進支援装置
【課題】電動車両における発進時の不安感を容易に解消することを可能にする。
【解決手段】電動車両の運転者の操作に応じてモータで発生させる要求駆動力を算出する要求駆動力算出部15と、電動車両を発進させるためにモータで発生させる必要がある発進可能駆動力を算出する発進可能駆動力算出部14とを備え、要求駆動力算出部15で算出した要求駆動力と発進可能駆動力算出部14で算出した発進可能駆動力とをもとに、当該要求駆動力と当該発進可能駆動力との乖離の度合いを提示する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
車両の運転支援装置
【課題】たとえ車両に大きなピッチング運動が生じて、制御対象を見失うような状況や、前方情報を大きく補正すべき状況が生じたとしても、可能な限り安定した精度で、レスポンス良く、前方の制御対象との衝突を回避する自動ブレーキ制御を安定して実行する。
【解決手段】ピッチング角θpが予め設定する閾値θpcより大きい場合は、少なくとも前回検出した制御対象の走行情報に基づいて制御対象と自車両1との衝突可能性を判定し、制御対象と自車両1との衝突可能性が有ることが判定された場合に自動ブレーキの介入による制動制御を行う。
(もっと読む)
自動二輪車の制動装置
【課題】前輪のブレーキ操作力に適切なアシスト力を加えることにより、フロントサスペンションの伸び上がりをコントロールし、旋回性を良好にする。
【解決手段】前輪ブレーキのキャリパシリンダ8に連通路11、液圧制御部12を介してマスタシリンダ6を接続し、液圧制御部12には弁13を備え、コントロールユニット14にて開閉制御する。コントロールユニット14は車速センサ17より車速及び減速度を算出し、マスタシリンダ6に設けたマスタシリンダ圧検出センサ19よりブレーキ操作量を検出する。操作レバー5を放すと、コントロールユニット14はマスタシリンダ圧検出センサ19の検出する液圧低下に基づきブレーキ操作量の変化率を算出し、所定の割合を超えると弁13で連通路11を絞り、急激なキャリパ圧の低下を防いでブレーキ制動力を維持させ、フロントサスペンションの急な伸びを抑制し、コーナリングを容易にする。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、走行抵抗の大きな路面であっても、最適な制動力により車両を停止することで容易に再発進を可能とする。
【解決手段】車両11が走行する路面の走行抵抗を検出する走行抵抗検出部62と、駆動力の余剰分を検出する駆動力余剰分検出部63と、ドライバの要求制動力を算出する要求制動力算出部64と、路面の走行抵抗が予め設定された所定の走行抵抗より大きいときに要求制動力から駆動力の余剰分を減算して目標制動力を算出する目標制動力算出部65とを設ける。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
隊列走行システム、先頭無人車両コントローラ、後続有人車両コントローラ、制御方法、及びプログラム
【課題】複数の車両を隊列走行させること。
【解決手段】先頭無人車両コントローラ110と、後続有人車両コントローラ130とを備え、先頭無人車両コントローラ110は、映像を示すデータを後続有人車両コントローラ130に送信する映像データ送信部と、無人車両200Aの操縦を制御するためのデータを後続有人車両コントローラ130から受信する制御データ受信部と、無人車両200Aの操縦を制御する操縦制御部とを有し、後続有人車両コントローラ130は、映像を示すデータを先頭無人車両コントローラ110から受信する映像データ受信部と、映像データ受信部が受信したデータを、表示手段に出力する映像データ出力部と、無人車両200Aの操縦を制御するためのデータの入力を、操縦手段から受け付ける制御データ入力受付部と、制御データ入力受付部が入力を受け付けたデータを先頭無人車両コントローラ110に送信する制御データ送信部とを有する。
(もっと読む)
1 - 20 / 86
[ Back to top ]