
Fターム[3D246JB47]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223)
Fターム[3D246JB47]の下位に属するFターム
Fターム[3D246JB47]に分類される特許
41 - 60 / 155
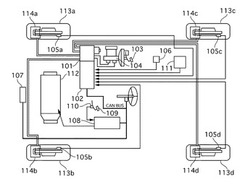
車両速度制御装置および車両速度制御方法
【課題】 ドライバの速度制御への介入が容易であり、利便性の向上を図ることができる車両速度制御装置および車両速度制御方法を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、ドライバのブレーキ操作状態を検出するマスタシリンダ圧センサ104と、自車両と先行車両との距離を検出するカメラ107と、自車両の走行速度を制御するエンジン112およびブレーキ装置(ブレーキ液圧ユニット101,ブレーキECU102)と、カメラ107により検出された先行車との距離Dcaが速度制御許可範囲内で、かつ、アクセル開度センサ110とマスタシリンダ圧センサ104により検出された操作状態があらかじめ設定された所定の状態の場合、自車両と先行車との相対関係を維持するように速度制御部(エンジン112およびブレーキ装置)を作動させるブレーキECU102と、を備えた。
(もっと読む)
ブレーキ制御装置

【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
車両の制動制御装置
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
車両の運動制御装置
【課題】実車挙動観測装置が推定する推定運動状態量の誤差が大きい場合であっても運転者が受ける違和感を軽減できる車両の制御装置を提供することを課題とする。
【解決手段】実車1に備わるヨーモーメント制御量算出部37aが算出して規範モデル301に入力する仮想外力MVFBの成分のうち、すべり角偏差βerrを含んだβ成分の大きさが、ヨーレート偏差γerrを含んだγ成分の大きさより大きい場合、ヨーモーメント制御量算出部37aは、β成分の大きさがγ成分の大きさより小さくなるようにすべり角偏差βerrを補正する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置の電源電圧が低下した際に、そのフェールセーフ制御を効果的かつ低コストに実現する。
【解決手段】ブレーキECU200は、通常の制動制御状態においては開閉弁28,30を閉弁させつつモータ40,42を駆動し、調整弁46〜54の開度を調整することで、ポンプ32,36からマスタシリンダ14への作動液の供給を遮断しつつ、ポンプ32〜38から吐出された作動液のホイールシリンダ20への供給量を調整する。一方、ブレーキECU200は、電源電圧が開閉弁28,30の最低作動電圧よりも低い低電圧状態となった場合にもモータ40,42を駆動し、ポンプ32,36から吐出された作動液の一部がマスタシリンダ14へ供給されることを許容する。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
ブレーキ力制御装置
【課題】逆入力に起因する増圧リニア制御弁の制御ハンチングの防止を図る。
【解決手段】ブレーキシリンダ液圧の変動が、ブレーキディスクの磨耗、ドラムの偏心に起因して生じる場合には、増圧リニア制御弁、減圧リニア制御弁への供給電流を抑制しても、ブレーキシリンダ液圧の変動は抑制されないことが多い。この場合に、不感帯幅を大きくすれば、増圧リニア制御弁、減圧リニア制御弁の作動間隔を長くすることができ、制御ハンチングを防止することができる。また、ブレーキシリンダ液圧の変動の状態を検出しつつ、不感帯幅を漸増させれば、不感帯幅を適正な大きさに変更することができる。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
41 - 60 / 155
[ Back to top ]