
Fターム[3D246JB47]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223)
Fターム[3D246JB47]の下位に属するFターム
Fターム[3D246JB47]に分類される特許
81 - 100 / 155
ブレーキ制御装置
【課題】ホイールシリンダへの供給液量とホイールシリンダの液圧の関係を示す作動特性では、ホイールシリンダへの供給液量と排出液量にもとづいてホイールシリンダの液圧を制御することは困難である。
【解決手段】液圧回路を介したホイールシリンダへのブレーキ液の供給によりホイールシリンダに液圧を供給し、当該液圧により車輪に制動力を付与するブレーキ制御装置において、液圧源は、液圧回路中に設けられ、モータの回転数に応じてホイールシリンダに液圧を供給する。液圧調整弁は、通電制御により開度が調整されて、ホイールシリンダの液圧を調整する。制御手段は、モータの回転数を一定に保ち、液圧調整弁への通電電流値を変化させたときのホイールシリンダの液圧にもとづいて、モータの回転数と、液圧調整弁への通電電流値と、ホイールシリンダの液圧との関係を示す制御特性を取得する。
(もっと読む)
電動倍力装置

【課題】入力部材の絶対変位量に応じて、入力部材とアシスト部材との相対変位関係が可変となるように変位量制御することができるようにすることで、所望する種々のブレーキ特性を得ることができ、ブレーキフィーリングの改善を行い得る電動倍力装置を提供する。
【解決手段】ポテンショメータ86(入力絶対変位量検出手段)の検出信号に応じて、入力ピストンとブースタピストンとの相対変位関係が可変となる目標変位量を設定し、両ピストンの相対変位量を検出する相対変位センサ100からの信号に基づき、両ピストンの相対変位量が前記目標変位量となるように変位量制御する。このように入力ピストンとブースタピストンとの相対変位量を制御することでブレーキアシスト制御など種々のブレーキ特性を得ることができる。
(もっと読む)
ブレーキ制御装置
【課題】回生制動により回収される過大なエネルギーがバッテリに与える負荷を軽減する技術を提供する。
【解決手段】ブレーキ制御装置において、回生ブレーキは、電動機による回生制動力を車両に設けられた車輪に付与する。制御装置は、車両制御のために目標となる目標総制動力を算出し、該目標総制動力を満たすように回生ブレーキにより発生させる目標回生制動力を決定するとともに該目標総制動力の不足分を満たすように液圧ブレーキにより発生させる目標液圧制動力を決定し、目標回生制動力および目標液圧制動力に応じて回生ブレーキと液圧ブレーキとを協調制御する。制御装置は、目標回生制動力が所定値より大きい場合、該目標回生制動力を低減した低減回生制動力に応じて回生ブレーキを制御する。制御装置は、低減された目標回生制動力を補うように目標液圧制動力を増大させた増大目標液圧制動力に応じて液圧ブレーキを制御する。
(もっと読む)
電動車両の制振制御装置
【課題】ブレーキ制動力の発生時、余分な振動抑制補償の出力を抑え、ブレーキ効き感の悪化を防止することができる電動車両の制振制御装置を提供すること。
【解決手段】動力源にモータ/ジェネレータMGを有するFRハイブリッド車両において、ドライバー要求に基づくF/F演算により第1トルク目標値Tm*1を算出する第1トルク目標値算出手段101と、トルク入力−モータ回転数の伝達特性のモデルGp(s)を用いたF/B演算により第2トルク目標値Tm*2を算出する第2トルク目標値算出手段102と、第1トルク目標値Tm*1と第2トルク目標値Tm*2に基づく演算によりモータトルク指令値Tm*とするモータトルク指令値設定手段103と、を備えている。第2トルク目標値算出手段102は、ブレーキ制動力Fbrkを入力し、ブレーキ制動力に対するモータ回転数の伝達関数Gpb(s)によるフィルタを用いてモータ回転数推定値補正量を算出する規範応答補正量算出部102aを有する。
(もっと読む)
電動車両の制振制御装置
【課題】車両重量や走行抵抗の変動に起因する定常的な外乱により生じる不要な加速度変動を抑制する。
【解決手段】動力源にモータ/ジェネレータを有するFRハイブリッド車両において、駆動トルクからモータ回転速度を推定するモータ回転速度推定部102aと、モータ回転速度を検出するレゾルバと、モータ回転速度推定値ωm#とモータ回転速度検出値ωmの偏差ω_errから外乱を推定する外乱推定部102cと、車両の振動成分を抽出して振動を抑制するための第2トルク目標値Tm*2を算出する第2トルク目標値演算手段102と、モータ回転速度擬似値ωm_susを算出する擬似モータ回転速度演算部102dと、を備える。そして、外乱推定部102cは、制振制御を開始する前の制振制御停止中、モータ回転速度検出値ωmに代え、モータ回転速度検出値擬似値ωm_susを用いて外乱を推定する。
(もっと読む)
タイヤ温度制御装置及びタイヤ温度制御方法
【課題】車両の制動が頻繁に行われても、十分な制動力を発生させることができるようにする。
【解決手段】タイヤの接地面の温度を検出する温度検出部と、タイヤの接地面の温度が設定温度以上であるかどうかによって、キャンバ角調整条件が成立するかどうかを判断するキャンバ角調整条件判断処理手段と、キャンバ角調整条件が成立する場合にキャンバ角を調整するキャンバ角調整処理手段とを有する。タイヤの接地面の温度が設定温度以上であると、キャンバ角が調整されるので、接地面の温度が設定温度より高くなるのを防止することができ、摩擦係数が小さくなるのを防止することができる。したがって、車両の制動が頻繁に行われても、十分な制動力を発生させることができる。
(もっと読む)
挙動制御装置
【課題】車輪の横滑りを抑制可能な挙動制御装置を提供する。
【解決手段】目標ヨーレートに基づき車両の挙動を制御する挙動制御装置において、車輪の許容横力を推定する手段(ステップS3)と、車輪の実横力を求める手段(ステップS4)と、許容横力または実横力のうち小さい方を選択する手段(ステップS5)と、選択された横力からヨーモーメントを求める手段(ステップS6)と、選択された横力から横加速度を求める手段(ステップS7)と、ヨーモーメントおよび横加速度から第1目標ヨーレートを求める手段(ステップS8)と、転舵角から第2目標ヨーレートを求める手段(ステップS9)と、第2目標ヨーレートが第1目標ヨーレート以下のときは第2目標ヨーレートを選択し、第2目標ヨーレートが第1目標ヨーレートを超えたときは第1目標ヨーレートを選択する手段(ステップS10,S11,S12)とを備えている。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
車両走行支援装置及び車両走行支援方法
【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
ハイブリッド車両のブレーキ操作の制御方法
本発明は、電気駆動モータ(12)のジェネレータモードによって制動可能である、ハイブリッド車両の油圧式の車両ブレーキ装置(1)のブレーキ操作を制御するための方法に関する。本発明によれば、車両ブレーキ装置に電気機械的なブレーキブースタ(13)が設けられており、電気駆動モータ(12)のジェネレータモードによる制動時に、ブレーキブースタ(13)によって、ブレーキペダル(15)におけるペダル力が形成される。 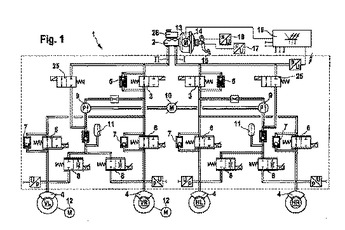 (もっと読む)
(もっと読む)
摩擦条件の変動を補償する軌道車両のブレーキ装置
本発明は、車輪または車輪セットに割り当てられた少なくとも一つのブレーキアクチュエータ(2)を備える軌道車両のブレーキ装置(1)であって、前記ブレーキアクチュエータは、少なくとも一つのブレーキディスク(4)と、該ブレーキディスクと協働作用するブレーキパッド(6)を、制動要求に応じて制動力を形成するために有する形式のブレーキ装置に関する。本発明では、少なくとも一つのセンサ装置が設けられており、これによりブレーキアクチュエータ(2)に割り当てられた車輪または車輪セットとレールとの間の摩擦条件および/またはブレーキアクチュエータ(2)に割り当てられたブレーキディスク(4)とブレーキパッド(6)との間の摩擦条件の少なくとも一つの変動の時間経過を表すパラメータとして車輪回転速度、車輪周加速度、制動力、制動トルクまたは制動圧を測定し、測定されたパラメータに依存する信号によって制御装置が制御され、該制御装置は、ブレーキアクチュエータ(2)によって形成された制動力を、測定されたパラメータの時間経過と該パラメータの目標の時間経過または予想される時間経過との偏差に依存して適合するように構成されている。  (もっと読む)
(もっと読む)
自動軌道補正方法
【課題】本発明は自動軌道補正方法に関する。最も頻繁に使用される現在のシステムはESPシステムである。このようなシステムは、旋回中の車両のヨーを観察することによって、運転者が望む軌道からの車両の逸脱を検出する。しかしながら、このようなシステムは、通常は有効であるが、車両が該車両の軌道の楕円化を受ける場合、所望の軌道からの逸脱を管理することが可能でない。
【解決手段】この問題を解決するために、本発明による方法は、車両が該車両の軌道の楕円化を受けるときの所望の軌道からの車両の逸脱を補正するために、車両のヨーのみでなく、後車軸上のドリフトも考慮することを提案する。
(もっと読む)
ブレーキ制御装置
【課題】運転者のブレーキフィーリングを良好に維持しつつ、制動制御の応答性を高めることができるブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置において、ブレーキECUは、ブレーキペダルの踏み込みがなされた状態からさらに所定量踏み込まれる踏み増しが行われたか否かを予め定める判定基準に基づいて判定し、その踏み増し判定がなされたときには、目標制動力に応じて演算された目標液圧に対してその目標値を上乗せする所定の嵩上げ処理を実行する。
(もっと読む)
車両安定化制御装置
【課題】車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供すること。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
ブレーキ制御装置
【課題】 負荷の駆動初期から目標液圧に対する実液圧の応答性を高めることができるブレーキ制御装置を提供する。
【解決手段】 車輪に設けられたホイルシリンダ5の液圧を増減するソレノイドバルブ(第1増圧制御弁6、第2増圧制御弁7、減圧制御弁8)を駆動するコントロールユニット20を備えたブレーキ制御装置において、ソレノイドに所定の電流値を与えたときの抵抗値の変化からソレノイド温度を推定するソレノイド温度推定手段と、推定された温度に応じてソレノイドに通電する電流のデューティ比を調整するソレノイド駆動手段と、を備え、ソレノイド温度推定手段は、ソレノイドの非駆動中および駆動中、所定の時間毎に温度推定を行う。
(もっと読む)
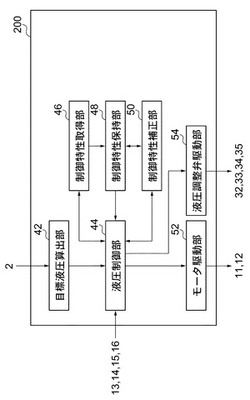
電流制御装置
【課題】所望の応答性および追従性を確保する。
【解決手段】電流制御装置10は、電流制御により駆動される各電磁弁12,15,32,35に通電される電流を所定デューティーにより制御するデューティー制御と、電流を目標電流に一致させるフィードバック制御とを、相互に所定制御周期内で繰り返し実行するとともに、デューティー制御およびフィードバック制御の何れか一方の実行中に何れか他方の実行を禁止する。
(もっと読む)
ブレーキ制御装置
【課題】急制動状態を適正に判定でき、その後のABS制御等に安定に移行させることができるブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、制御部は、ブレーキ操作部材の操作量に応じた第1の液圧勾配にて目標ホイールシリンダ圧を設定して制御弁の開度を制御する通常リニア制御と、所定のアシスト条件が成立したときに切替弁を開弁させて作動液を追加供給してホイールシリンダ圧の上昇を促進するアシスト制御とを含む複数の液圧制御を切り替えて実行する。制御部は、アシスト制御中に検出部により検出される液圧の液圧勾配が設定勾配以上となり、かつその液圧が設定値以上となったときに切替弁を閉弁し、第1の液圧勾配よりも緩やかな第2の液圧勾配にて目標ホイールシリンダ圧を設定して制御弁の開度を制御する特別リニア制御を実行する。
(もっと読む)
自動車両制動装置
【課題】自動制動時における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、自動制動制御を行う際にはディスクブレーキ31に付与する油圧の調整のみで車両1の減速度の調整を行う自動制動制御部87を設ける。これにより、自動制動制御を行う場合にはドラムブレーキ35の制動力は調整しないので、制動力の制御が難しいドラムブレーキ35の制動力を調整することに起因して車両1の減速度が安定しなくなることを抑制できる。この結果、自動制動時における制動の安定性を図ることができる。
(もっと読む)
ブレーキ装置
【課題】
実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供する。
【解決手段】
本ブレーキ装置は、ブレーキペダル操作によるペダルストローク又はペダル踏力を検出するペダル操作検出部と、車両の各車輪に設けられ前記ペダル操作検出部の検出値に応じた推力を発生するブレーキキャリパと、前記各車輪の接地荷重を推定する接地荷重推定部と、前記接地荷重推定部の推定値に基づき車両の左右輪で接地荷重差がある状態で制動したと判断した後、当該制動若しくはそれ以前の制動と同じペダルストローク又はペダル踏力を前記ペダル操作検出部が検出しても、前記判断以前とは異なるキャリパ推力を発生させる推力発生部を備える。
(もっと読む)
81 - 100 / 155
[ Back to top ]