
Fターム[3D246JB47]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223)
Fターム[3D246JB47]の下位に属するFターム
Fターム[3D246JB47]に分類される特許
61 - 80 / 155
車両用制動装置
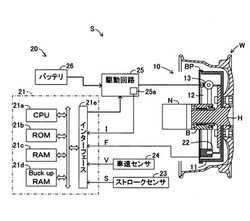
【課題】セルフサーボ効果の有無を考慮して電動アクチュエータの作動を制御する車両用制動装置を提供する。
【解決手段】電子制御ユニット21のCPU21aは、車両の減速に伴って、車速センサ24から入力した車速Vが所定の小さな車速V0以下となるとき、セルフサーボ効果が無効化したと判定する。次に、CPU21aは、現在、電動アクチュエータ13に供給しているモータ電流値Iに対応して前記効果が発生している場合の荷重と前記効果が無効化した場合の荷重との荷重差ΔFを決定し、この荷重差ΔFを荷重センサ22から入力した検出荷重Fに加算して補正する。そして、CPU21aは、補正した検出荷重Fと車両を減速させるために決定した目標荷重Fdとの差分を計算し、この差分に基づいてアクチュエータ13の駆動を制御する。これにより、前記効果の有無によってアクチュエータ13に供給する電流値Iの急増を防止し、連続性を保つことができる。
(もっと読む)
車両の経路追跡システム及び方法
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システム。本発明によれば、システムは、同じ車軸(Aav及びAar)の車輪間の速度偏差を計算する手段(200及び201)と、各車軸の速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含む。本発明は、次の:各前車軸及び後車軸(Aav及びAar)の車輪の速度偏差を計算するステップと、各前車軸及び後車軸(Aav及びAar)間の速度偏差の差を計算するステップと、速度偏差の差を記憶された閾値(ε)と比較するステップとを含む自動車車両の経路追跡方法にも関する。 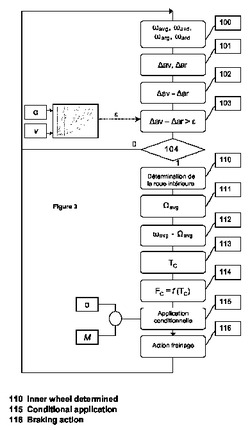 (もっと読む)
(もっと読む)
車両の旋回挙動制御装置

【課題】旋回走行時における制動力制御を迅速かつ適切に行い、走行性能を向上させる。
【解決手段】車両の左右輪の制動力を独立して制御可能に構成し、左右の車輪速度センサにより検出した左右輪の実車輪速度の差DVFと、車両の走行状態に基づいて演算した左右輪の目標車輪速度差DVrefとの速度差ΔNを演算して(S30)、該速度差ΔNに基づいて左右輪の制動力を制御する(S90)第1の制動制御手段と、ヨーレイトセンサにより検出した実ヨーレイトと、車両の走行状態に基づいて演算した目標ヨーレイトの差に基づいて左右輪の制動力を制御する(S80)第2の制動制御手段とを有し、第2の制動制御手段による制御時には、第1の制動制御手段による制御を規制する。
(もっと読む)
電動式ブレーキ装置
【課題】軸力センサにより安定したブレーキ力の検出を可能にするとともに、減速度検出値による制御と組み合わせてあらゆる速度域で高い精度にてブレーキ制御を行う。
【解決手段】ブレーキロータ23の回転面に直交させて電気アクチュエータ4によりブレーキパッド22を押し付けて制動を行う電動式ブレーキにおいて、前記ブレーキパッド22の押付け力を検出する軸力センサ10から得られた検出値と、車輪速度センサ30から演算されて得られた減速度とから、運転者の操作目標とする減速度制御を行うことにより、温度変化の影響を受けにくく指向性を保持し易い直動変換部13、14に配設した軸力センサ10と、制動中のブレーキパッド22の摩擦係数の変化の影響を受けにくい減速度検出とを組み合わせて、操作者のブレーキ要求に基づく電気的ブレーキ制御をあらゆる速度域にて高い精度にて行うことが可能となった。
(もっと読む)
ブレーキ制御装置
【課題】電磁弁に発生しうる振動を抑制することができるブレーキ制御装置を提供することにある。
【解決手段】ブレーキ制御装置は、ブレーキ液が供給されて車輪に制動力を付与するホイールシリンダと、ホイールシリンダに流路を介して接続され、通電制御により開度が調整される電磁弁と、パルス幅変調制御されたパルス信号を電磁弁に通電する制御をする制御部と、を備える。そして制御部は、電磁弁における自励振動の発生が予測された場合に、電磁弁に通電するパルス信号の周波数を所定の通常周波数より高くする。
(もっと読む)
連結車両の挙動制御装置
【課題】スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供すること。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中において第1の電磁弁の動作態様を調整し、車両の挙動の更なる安定化に貢献できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において、圧力センサからの検出信号に基づきホイールシリンダ内の実WC圧Pwc_rを取得すると共に、増圧弁及び減圧弁の駆動態様に基づきホイールシリンダ内の推定WC圧Pwc_eを取得する。そして、ECUは、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差がある場合(第7のタイミングt17)、差圧推定値ΔPdと増圧弁に対する指令電流値Idとの関係を示す特性マップを、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差が小さくなるように補正する。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を低減する。
【解決手段】GPS装置により測位された現在位置Pcから所定距離D内に、障害物測定波を反射して障害物として誤測定される可能性がある停止物の位置Psが存在するか否を判定する(S8〜S11)。また、車両進行方向に位置する障害物との相対速度V及び障害物までの距離Lに基づいて、障害物に衝突するまでの衝突時間tを演算する(S16〜S18)。そして、現在位置Pcから所定距離D内に停止物の位置Psが存在せず、且つ、衝突時間tが所定閾値t2以下となったときに、ブレーキを自動的に作動させる。このため、予め記憶されている停止物の位置Psの近傍ではブレーキが自動的に作動しないことから、ブレーキの誤作動を低減することができる。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
ブレーキ装置の操作方法および装置
液圧式ブレーキ装置において、ブレーキ装置内に供給された容量並びにこれにより得られた全ブレーキ回路内の圧力の間の関係、いわゆるp−V特性曲線を知ることが有意義である。特に、全ブレーキ回路のp−V特性曲線のみならず個々の構成要素のp−V特性曲線もまた知ることが重要である。種々の遮断弁(8−10、13)の操作と共に容量移動ユニット(2、14、26、27)を作動させることにより、ブレーキ装置の種々の構成要素に対する複数のp−V特性曲線が決定可能である。 (もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
電動ブレーキ制御装置及び電動ブレーキ制御方法
【課題】運転者の意図しないペダル操作による運転者の予期しない振動や音の発生を低減可能な電動ブレーキ制御の技術を提供する。
【解決手段】ブレーキペダル50から前記主ピストン11に入力する操作推力を、電動アクチュエータ20の駆動によってアシストすることで、マスタシリンダ40で発生するブレーキ液圧を制御する。このとき、ブレーキペダル50に掛かる踏力Tが踏力閾値d以下では、前記踏力Tが踏力閾値dよりも大きい場合に比べて、前記電動アクチュエータ20の駆動を小さく抑制する。
(もっと読む)
車両の軌道を変更するための方法及びシステム
この発明は、車両の軌道を変更するための方法に関し、該車両が、手動の操舵装置、少なくとも1対の接地部材、並びに手動操舵装置と接地部材との間の機械的相互接続を含み、車両の軌道が変更されるように、前記接地部材の少なくとも1つに制動力を付与すると同時に、機械的相互接続から生じる操舵装置外乱を抑制するステップを特徴とする。 (もっと読む)
加加速度情報を用いた車両の運動制御方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモ
ーメント量を調整すること。
【解決手段】入力された横方向の加加速度(Gy_dot)を、入力された車両の前後方向の速度(V)で除した値(Gy_dot/V)に対して、さらに入力された車両の横加速度(Gy)で除した値に比例した物理量に基づいて、車両の前後加速度の制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。また、上記の車両の横方向の加加速度(Gy_dot)は、入力された横加速度を(Gy)をもとに求めること。また、入力された車両の横方向の加加速度(Gy_dot)に、速度(V)及び横加速度(Gy)から決定され、予め記憶されたゲイン(KGyV)を乗じ、乗じた値に基づいて、車両の前後加速度を制御する制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。
(もっと読む)
車両制御装置
【課題】誤操作によってアクセルペダルが戻された場合であってもスムーズな発進を可能とする車両制御装置を提供する。
【解決手段】電動パーキングブレーキ装置の解除条件が成立しているか否かを判定する解除条件判定手段と、車両が停止している路面の傾斜を検出する傾斜検出手段と、前記路面の傾斜角度に応じた推定走行抵抗を算出する推定抵抗算出手段と、車両の駆動力を算出する駆動力算出手段と、アクセルペダルからの入力に基づいてエンジンの出力を制御するエンジン出力制御手段とを備える車両制御装置であって、エンジン出力制御手段は、解除条件判定手段により電動パーキングブレーキの解除条件成立が判定されかつ駆動力が推定走行抵抗以上となった後に、アクセルペダルからの入力に関わらずエンジンの回転数が所定の下限エンジン回転数以上となるようにエンジンの出力をフィードバック制御する構成とする。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
車両用ブレーキ装置
【課題】車室内の静粛性を確保することができるブレーキ装置を提供する。
【解決手段】車両用ブレーキ装置1は、モータ31の駆動によりブレーキペダル5の踏力を倍力する制動アシスト装置2と、モータ31を制御するアシスト制御ユニット6を備えている。アシスト制御ユニット6は、車速に応じてモータ31の応答性を変更し、車速が低い領域では不感帯量やフィルタリング値を大きい値に設定する。これにより、ブレーキペダルの操作に対するモータ31の倍力動作の応答性を低くし、低速走行あるいは走行停止中にストロークセンサ14の検出信号に微少な振動によってモータ31に回転変動や振動が発生するのを防ぐ。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
61 - 80 / 155
[ Back to top ]