
Fターム[3D301EA82]の内容
Fターム[3D301EA82]の下位に属するFターム
路面摩擦係数/ミュー (85)
Fターム[3D301EA82]に分類される特許
161 - 180 / 183
車両用制御装置
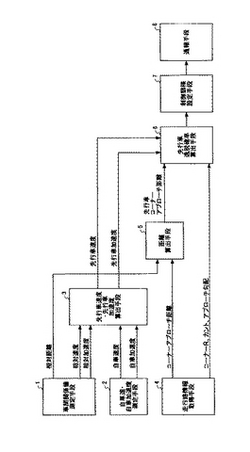
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
車両制御装置及び車両制御方法

【課題】 本発明は、巻き込み風発生時の車両の挙動を安定化させることができる車両制御装置の提供を目的とする。
【解決手段】 本発明による車両制御装置は、減衰圧の制御が可能なサスペンション、又は、ステアリング操作のアシスト量が制御可能なパワーステアリング装置を有する車両に適用される。車両制御装置は、自車と周辺車両との相対関係に基づいて、該周辺車両とのすれ違い時の空気流れの乱れに起因して発生する巻き込み風の規模を予測する巻き込み風量予測手段を備え、巻き込み風量予測手段による予測規模に基づいて、サスペンションの減衰特性、又は、ステアリング操作のアシスト量を変化させることを特徴とする。
(もっと読む)
車両制御装置
【課題】 車両走行中の振動を抑制すべき位置を適宜変更して常に最適な振動抑制効果を得ることができるようにする。
【解決手段】 乗員が振動抑制位置設定手段15のスイッチ位置を切り替えていれば、そのスイッチ位置に応じて振動抑制位置を設定する。また、コーナリング状態検出手段16でコーナリング状態が検出された場合、コーナリング前半は、前輪位置を振動抑制位置に設定し、コーナリング後半は、車両重心位置を振動抑制位置に設定する。また、荷物状態検出手段17の検出信号に基づいて積載荷物が振動に弱い荷物であることが検出されれば、積載荷物の位置(荷物室)に対応した振動抑制位置を設定する。また、着座位置検出手段18で検出した前席人数と後席人数の大小関係に応じて振動抑制位置を設定する。或は、後席に1人でも着座していれば、振動抑制位置を常に後席に設定しても良い。
(もっと読む)
段差学習システム
【課題】サスペンションの制御状態に応じて段差を検出するための閾(しきい)値を変更するようにして、サスペンションの制御状態に関わらず段差を適切に検出することができ、学習された段差エリアの段差情報が誤って削除されることがなく、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、段差制御が実行中であるか否かを判定する判定手段と、該判定手段による判定結果に基づいて、前記記憶手段に段差エリアの段差情報を記憶するための段差検出閾値を設定する設定手段と、前記段差検出手段が検出した段差の段差レベルが前記段差検出閾値以上である段差エリアの段差情報を前記記憶手段に記憶させる記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】段差エリアが検出された場合であっても、段差を学習するのに相応しくない状況においては学習しないようにして、車両の走行安定性や乗り心地が低下することがなく、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、車両の走行状況を判定する判定手段と、該判定手段による判定結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に選択的に記憶させる記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】検出された複数の段差エリアを間隔が短い場合には結合して単一の段差エリアとし、また、段差エリアが検出された場合に同一地点判定を行って、同一地点についてのデータを再度記憶しないようにして、記憶容量を削減することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差エリアの段差情報と、前記段差検出手段が検出した段差エリアの段差情報とを比較する比較手段と、該比較手段による比較結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に記憶させる記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】段差が消滅したことを検出し、消滅した段差に関するデータを記憶手段から削除することによって、消滅した段差に対する不要なサスペンション制御を行うことがなく、記憶容量を削減することができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、段差制御が実行中であるか否かを判定する判定手段と、段差制御が実行中である場合に前記段差検出手段によって段差が検出されない段差エリアの段差情報を、前記記憶手段から削除する記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】段差についての記憶されるデータに優先度を適切に設定し、該優先度に従って記憶手段から削除することによって、記憶容量を削減することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、該記憶手段に記憶された段差エリアの段差情報に、当該段差エリアの属性情報に基づく優先度を付与する優先度付与手段と、前記記憶手段の記憶容量に応じ、前記記憶手段に記憶された段差エリアの段差情報を当該段差エリアに付与された優先度に従って選択的に削除し、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に記憶させる記憶処理手段とを有する。
(もっと読む)
フォークリフトトラックの改良
【課題】 荷物を移動するためのフォークリフトトラックを提供する。
【解決手段】 本フォークリフトトラックは、荷物を支持するための荷重支持部材(3)を有し、トラックには、平坦度が様々に変化し又は水平な状態から逸脱した表面に沿ってトラックが移動するとき、荷重支持部材の垂直軸線を調節し、荷物を重力で引っ張る軸線と実質的に平行に維持するための手段(4、5、15、19)が設けられている。  (もっと読む)
(もっと読む)
スタビライザー
【課題】 捩じれ剛性を簡単な操作で変更できるスタビライザーの提供。
【解決手段】 左右一対の各懸架装置に取付けられる第1のトーションバー部材21と第2のトーションバー部材22との間に第2のトーションバー部材22に固定された第3のトーションバー部材31を配置し、油圧作動機構10の可動筒12により管状スライダー13を軸方向に移動させることにより、第1のトーションバー部材21とは軸方向移動自在で軸周り方向には一体に係合する管状スライダー13が第3のトーションバー部材の平板部33と係合する位置が軸方向でずれることで捩じれ剛性の調節が行なわれる。
(もっと読む)
車両用衝突制御装置
【課題】 衝突による車両と乗員のダメージを最少限に抑制する。
【解決手段】 自車両と他車両との衝突が避けられないと判定された場合には、自車両周辺の撮像画像の処理結果の他車両のバンパーの路面からの高さおよび傾きと、自車両のサイドメンバーの路面からの高さおよび傾きとのオフセット量を演算し、オフセット量を減少するように自車両の各車輪位置の車高を調節する。
(もっと読む)
車高検出装置
【課題】 従来の車高検出装置は、レバーの回動角度を検知する車高センサを車体フレーム外面に取付け、該レバーを連結ロッドの一端に連結し、該連結ロッドの他端を車軸に固着して構成されていた。この車高検出装置は可動部分や開口部が露出しており、タイヤにより巻き上げられる汚泥や水により、故障し易かった。
【解決手段】 車体フレーム30と前車軸32との間のサスペンションとしては板バネ31が用いられ、後車軸35との間のサスペンションとしてはエアサスペンション34が用いられている。車体フレーム30に、モールド型の前後方向用バネ上傾斜角センサ3を設置する。高さHの基準車高位置Aから前後方向車高検出位置Bまでの長さをLとすると、エアサスペンション34が車体フレーム30を押し上げ、前後方向の傾斜角αが検出された場合、前後方向車高検出位置Bの車高は、H+L・sinαと算出される。前後方向用バネ上傾斜角センサ3には、露出した可動部分や開口部がないので、汚泥や水により故障することがない。
(もっと読む)
車両の可変ダンパー制御方法
【課題】後輪の垂直加速度値を推定して、後輪側可変ダンパーを制御することができる、車両の可変ダンパー制御方法を提供する。
【解決手段】加速度を感知する過程aと、目標とする車軸加速度を得る過程bと、車体の垂直方向速度を算出する過程cと、車両の前輪の左右加速度を感知する過程dと、感知された前輪の左右加速度に対して、DCオフセットの除去のためのフィルタリングを行い、前輪の垂直方向速度を計算した後、車両の車速において、前車輪に入った路面入力が、後車輪まで到達するのに所要する時間ほど、前輪の垂直方向速度を遅延させて、後輪の垂直方向速度を算出する過程eと、算出された車体の垂直方向速度及び前後輪の垂直方向速度を用いてダンパー速度を計算する過程fと、を含む。
(もっと読む)
車両の姿勢制御装置
【課題】 車両旋回時の運転者の乗車感をさらに向上することを目的とする。
【解決手段】 車両1の姿勢を総合的に制御する姿勢制御ECUは、車両が旋回している時に、車両の所定時間T後の走行位置P2を演算する。そして、現在の走行位置P1から所定時間T後の走行位置P2への方向に回転軸Sを設定し、この回転軸S回りに車体1を回転して、車両姿勢を旋回外側に前のめりとなった状態にする。この姿勢最適化制御により、実際には車両1にピッチが発生しているにも拘らず、運転者に“車両1にピッチがなく、ロールのみが発生している”という自然な感覚を与えることができ、車両1の乗車感を向上することができる。また、姿勢制御ECUは、走行中の道路が直線である場合には、姿勢最適化制御を禁止してもよい。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 情報記録媒体に記憶されているデータに基づいて、車両の走行経路情報を検出する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、情報記録媒体のデータに、車両の走行経路の所定距離内に平行した道路が存在するか否かを判断するとともに、情報記録媒体のデータに、車両の走行経路の所定距離内に複数の交差点が存在するか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS12〜S15)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両用サスペンション装置
【課題】実用的な車両用サスペンション装置を提供する。
【解決手段】 車体の一部に設けられた取付部16から上方に突出して取り付けられた車体側デバイス34を有する減衰力発生装置12を備えた車両用サスペンション装置10に、その突出する部分の突出量が減少するように、車体側デバイス34の少なくともその部分の変位を許容する突出部変位許容機構を備えさせる。突出部変位許容機構は、例えば、ソレノイド50のピン52により下方への移動が禁止されている車体側デバイス34を、ソレノイド50の励磁によりピン52を抜き出すことで移動の禁止を解除させ、それの下方への移動を許容する構造とする。つまり、減衰力発生装置12の上端部と取付部16の上方に設けられたフード90との間隔を拡大でき、その拡大された空間を利用して、フード90に対して上方から加わる衝撃を効果的に緩衝させることが可能となる。
(もっと読む)
車両用運転支援装置
【課題】 運転者が体得している運転技量に可能な限り合致した操舵支援を簡便な手法で実現する車両用運転支援装置を提供する。
【解決手段】 車両前方の道路線形を検出する道路線形検出回路33およびナビゲーション装置38と、車両の運動状態を検出するロール角速度センサ30と、運転者の操舵角を検出する操舵角センサ31と、道路線形と車両の運動状態と運転者の操舵角とに基づいて、運転者の運転技量を判定する運転者技量判定回路32と、判定された運転者の運転技量に応じて、アクティブサスペンション制御装置35または舵角比制御装置36の一方を用いて運転支援を行う運転支援実施回路34と、を備える。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記走行経路情報検出装置により前記車両が曲線部を走行中であるか否かを判断するとともに、ステアリングホイールの操舵角が所定値を超えているか否かを判断することにより、前記車両が曲線部を走行中であるか否かという走行経路情報の検出精度を判断する精度検出手段(ステップS12〜S16)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
路面状態判定方法
【課題】 サスペンション装置のバネ上上下加速度に基づいて路面状態を精度良く判定する。
【解決手段】 バネ上上下加速度センサで検出したサスペンション装置のバネ上上下加速度をバンドパスフィルタでフィルタリングし、0.7Hz〜1.0Hzのバネ上共振周波数領域の振動の実効値と、バネ上共振周波数領域およびバネ下共振周波数領域の中間の3.0Hz〜8.0Hzの中間周波数領域の振動の実効値とを算出し、(バネ上共振周波数領域の振動の実効値)/(中間周波数領域の振動の実効値)で表される比を閾値と比較することで、波状路、コブ状路、良路、簡易舗装路等を判定するので、路面状態の判定精度を高めることができる。そして判定した路面状態に応じてダンパーの減衰力を制御することで、種々の路面状態における乗り心地を両立させることができる。
(もっと読む)
161 - 180 / 183
[ Back to top ]