
Fターム[3D301EA82]の内容
Fターム[3D301EA82]の下位に属するFターム
路面摩擦係数/ミュー (85)
Fターム[3D301EA82]に分類される特許
141 - 160 / 183
走行支援装置及び走行支援方法

【課題】横風による舵角の揺れを未然に抑制できる車両制御装置及び車両制御方法を提供する。
【解決手段】風向を含む風情報と道路地図情報とを取得するソース情報取得手段と、
自車の現在位置を特定するロケータと、前記現在地と前記道路地図情報と前記風向とに基づいて走行予定道路上で前記自車が横風を受けると予測される横風区間を設定する設定手段と、前記現在位置及び前記横風区間に基づいて、前記自車が前記横風区間より手前の予め決められた所定地点に到達すると前記自車のロール剛性を上げる制御手段と、を備える車両制御装置。
(もっと読む)
車両用減衰力制御装置、車両用減衰力制御方法

【課題】 急制動を必要とする時の車両安定性を向上させて乗り心地を向上できる車両用減衰力制御装置等を提供する。
【解決手段】 車両に加わる振動を減衰させるショックアブソーバ3で発生する減衰力を調整するアクチュエータ2を制御するために、障害物認識装置9の認識結果によってブレーキ操作がなされる可能性を予測する機能と、ブレーキ操作がなされないことが予測された場合には、所定の減衰力を発生させるようにアクチュエータ2を制御する一方で、ブレーキ操作がなされる可能性が高いことが予測された場合には、当該ブレーキ操作がなされる前に、所定の減衰力よりも高い減衰力を発生させるようにアクチュエータ2の制御を開始する機能とをECU1に実装する。
(もっと読む)
車輪のタイヤグリップ度推定装置
【課題】良路走行状態であるか悪路走行状態であるかに拘らず車輪のタイヤグリップ度を高精度に推定する。
【解決手段】車輌の前後方向及び横方向の荷重移動に基づく各車輪の第一の接地荷重Fz1iが演算され(S20)、車輪のバウンド、リバウンドにより変形するサスペンション部材の変形量に基づく各車輪の第二の接地荷重Fz2iが演算され(S30)、非悪路走行時には(S40)、各車輪の接地荷重Fziが第一の接地荷重Fz1iに設定され(S80〜100、190)、悪路走行時には(S40)、各車輪の接地荷重Fziが第二の接地荷重Fz2iに設定され(S50〜70、190)、接地荷重Fziに基づいてセルフアライニングトルクモデル値Tsatoが演算され、該セルフアライニングトルクモデル値Tsatoを使用して左右前輪のタイヤのグリップ度εfl、εfrが演算される(S200)。
(もっと読む)
段差学習システム
【課題】学習された段差エリアの位置情報の信頼性に応じてサスペンション制御を行うようにして、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を、該段差情報の信頼性情報とともに記憶する記憶手段と、該記憶手段に記憶されている段差エリアの段差情報に基づいて段差制御を行うとともに、前記信頼性情報に応じて制御量を変化させる段差制御手段とを有する。
(もっと読む)
車両のロール剛性配分制御装置
【課題】 車両搭載性の悪化、コスト高を伴うことなく、自由度の高いロール剛性配分制御を実現する車両のロール剛性配分制御装置を提供する。
【解決手段】 前輪側スタビライザー1,2と後輪側スタビライザー3とを備えた車両において、前輪側スタビライザーのロール剛性を3段階に変更する前輪側ロール剛性変更装置4,5と、後輪側スタビライザー3のロール剛性を2段階に変更する後輪側ロール剛性変更装置6と、車速および路面状態に応じて前輪側ロール剛性変更装置4,5と後輪側ロール剛性変更装置6の設定で決まるロール剛性配分を制御するコントロールユニット10と、を備える。
(もっと読む)
車両用制御装置
【課題】 運転者の回避操作を支援する。
【解決手段】 先行車の挙動を検出するとともに、先行車の挙動に基づいて運転者が回避操作を行う可能性を判定し、運転者が回避操作を行う可能性ありと判定された場合に車両の回頭性を向上させる。
(もっと読む)
車両乗上制御システム及び車両乗上制御方法
【課題】車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができるようにする。
【解決手段】道路における段差部を認識する段差部認識処理手段と、車両の予想走行軌跡を算出する予想走行軌跡算出処理手段と、予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかを判断する乗上判定処理手段と、車輪の段差部への乗上げが予測される場合に、車両支持機構の動作を制御する車両支持機構制御処理手段とを有する。予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかが判断され、乗上げが予測される場合に、車両支持機構の動作が制御されるので、車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができる。
(もっと読む)
車両制御装置およびカント状態判定方法
【課題】 車両の走行路のカント状態を精度よく速やかに判定可能とする車両制御装置およびカント状態判定方法の提供。
【解決手段】 車両1は、車速Vを検出するための車輪速センサ25と、車両1の横加速度Gを検出する横Gセンサ26と、車両1の操舵状態を検出するための操舵角センサ21および操舵トルクセンサ22と、少なくとも車両1の走行レーンを示す情報を含む走行環境情報を取得するためのナビゲーションシステム28と、検出された車速V、横加速度G、操舵状態および走行環境情報と、少なくとも車両1の走行レーンに関連付けられた教師信号とに基づいて車両1の走行路のカント状態を学習すると共に、車速V、横加速度G、操舵状態および走行環境情報に基づいて学習結果を用いたニューラルネットワーク演算を行い、車両1の走行路のカント状態を判定するカント状態判定部を含む操舵ECU20とを備える。
(もっと読む)
段差学習システム
【課題】段差を検出中に現在位置の精度が低下した場合には、当該段差エリアの段差情報を記憶手段から削除することによって、正確な段差情報を学習することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差に基づく段差エリアの段差情報を記憶する記憶手段と、車両の現在位置を検出する現在位置検出手段と、検出された現在位置の精度を算出する現在位置精度算出手段と、算出された現在位置の精度が所定のレベルより低いと、前記段差エリアの段差情報を前記記憶手段に記憶させない記憶処理手段とを有する。
(もっと読む)
車両制御装置および車両制振方法
【課題】 車両を良好に制振すると共に、ドライバーの要求とは別の条件に応じて目標制御量が設定される際の車両の安全性を容易かつ良好に確保する。
【解決手段】駆動制御ECU10は、ドライバーの要求に応じて第1の目標駆動力を設定する目標駆動力取得部112と、第1の目標制御量を車両1のバネ上振動が抑制されるように補正可能なフィルタ114とを有し、ECBECU20は、ドライバーの要求とは別の条件に基づいて第2の目標駆動力を設定する要求駆動力算出部21と、第1の目標制御量と第2の目標制御量とを調停するためのVDIM調停器22とを有し、駆動制御ECU10には、要求駆動力算出部21により第2の目標制御量が算出された場合に、フィルタ114を介することなく第1の目標制御量をVDIM調停器22に直接入力させる第2切換器SW2が設けられている。
(もっと読む)
車両制御装置および車両制振方法
【課題】 ドライバーの要求等に応じて車両諸元が変化しても、車両を良好に制振することを目的とする。
【解決手段】 車両1は、目標駆動力Ptに基づいて内燃機関や変速機を制御する駆動制御ECU10を有し、駆動制御ECU10は、ドライバーの要求等に基づいて目標駆動力を設定する第1調停器114と、それぞれ異なる減衰特性を有し、第1調停器114からの目標駆動力Ptを車両1のバネ上振動が抑制されるように補正する複数のフィルタF1〜FnおよびFeと、スイッチング部116aとフィルタ設定部117とを含む切換器116とを備え、フィルタ設定部117は、ピッチング共振周波数が変化したか否かを判定し、ピッチング共振周波数が変化したと判断すると、それまで目標駆動力Ptの補正に用いられていたフィルタを変化後のピッチング共振周波数に対応したフィルタに切り換える。
(もっと読む)
鉄道車両の車体傾斜制御システム
【課題】 曲線路走行時に車体を傾斜させることにより曲線路での走行速度を上げることができ、しかもそうした車体傾斜制御のフェール時には空気バネ内の空気を即座に大流量排出して車体を迅速に水平な姿勢に復帰させることができる、鉄道車両の車体傾斜制御システムを提供する。
【解決手段】 台車5上に左右一対の空気バネ3・3を介して車体2を支持するとともに、空気バネ高さ検出手段20により左右の空気バネ3・3の高さを検出して車体2を一定高さに調整する自動高さ調整弁6を備えた鉄道車両の車体傾斜制御システムにおいて、自動高さ調整弁6により制御される各空気バネ3・3内における空気の排出を、空気バネ3内の空気量が基準値を超える場合には単位時間当たりの流量を増大して大流量排気とし、基準値以下の場合には単位時間当たり通常流量排気とする2段排気にした。
(もっと読む)
鉄道車両の車体傾斜制御システム
【課題】 曲線路走行時に車体を傾斜させることにより曲線路での走行速度を上げることができ、しかも空気バネ高さ計測用センサをはじめ、車体傾斜制御装置の構成機器を2重化し信頼性を向上する鉄道車両の車体傾斜制御装置を提供する。
【解決手段】 台車5上に左右一対の空気バネ3を介して車体を支持するとともに、空気バネ高さ検出手段20により左右の空気バネ3の高さを検出して車体2を一定高さに調整する自動高さ調整弁6を備えた鉄道車両の車体傾斜制御装置において、自動高さ調整弁(LV)6を経由した加圧空気供給系と、車体傾斜制御専用の制御給排気弁とを、それぞれLV遮断弁7を介して各空気バネ3に接続し、空気バネ高さ検出手段20を、ステータ22に内蔵されるロータ21を備えた2以上のレゾルバから構成し、各レゾルバのロータ21を自動高さ調整弁6の共通の弁軸6b上に並べて配置した。
(もっと読む)
車輪情報処理装置および車輪情報処理方法
【課題】 車輪側と車体側との間における車輪情報の通信を容易かつ安定に実行することができる車輪情報処理装置の提供。
【解決手段】 車両10は、車輪14に関連する車輪情報を処理する車輪情報処理装置を備え、この車輪情報処理装置は、車体12に設けられた車体側通信機45と、互いに異なる箇所に位置するように車輪14に設けられており、相互間で車輪情報の通信を実行可能であると共に、それぞれ車体側通信機45との間で車輪情報の通信を実行可能な複数の車輪側通信機41〜44と、車両10の走行状態および環境条件の少なくとも何れかに応じて、複数の車輪側通信機41〜44のうちの何れか1体を車体側通信機45と通信する親通信機として設定するECU100とを含む。
(もっと読む)
減衰力発生システムおよびそれを含んで構成された車両用サスペンションシステム
【課題】 車両用サスペンションシステムに配備されてモータの力によって減衰力を発生させる電磁式アブソーバシステムの実用性を改善する。
【解決手段】 電磁式アブソーバシステム18に高速動作対処手段を設けることで、高速ストローク動作時における減衰力不足、制御性悪化等を解消する。具体的には、例えば、油圧式アブソーバ64を並設して、モータ68の起電力が電源電圧を超えるような高速動作時において機能させる。また、T−N特性の異なる2つのモータを配備し、ストローク速度に応じて使い分ける。モータと電源との間に可変抵抗を介在させ、モータの時定数の減少等を実現させるべく、高速動作においてその可変抵抗の抵抗値を増大させる。また、路面の大きな凹凸に対応すべく、モータの駆動力によって能動的なストローク動作を行い、高速動作が行われることを未然に防止する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】 予め登録された場所で周辺状況に応じた運転操作の支援を行う運転支援方法及び運転支援装置を提供する。
【解決手段】 ナビゲーション装置1は、車両の位置及び方位を取得する自車位置検出部5と、後方カメラ25から取得した画像データを画像処理して、登録された地点と自車位置との相対距離と相対方位を算出する画像処理部15を備えている。制御部3は、初期位置から目標位置までの車両の運転操作を示す駆動履歴情報18を取得し、走行履歴情報記憶部16に格納する。そして、制御部3は、予め登録された初期位置に車両が接近した際に、登録された前記駆動履歴情報18に基づいて、車両を目標位置まで追従走行させる。
(もっと読む)
鉄道車両の車体傾斜装置
【課題】 曲線路通過時の車体に傾斜を従来よりも大きくし、曲線路での通過速度を上げることができる鉄道車両の車体傾斜装置を提供する。
【解決手段】 車体2下の振子梁3と台車5との間に振子機構4を備え、台車5上で車体2を左右方向に揺動自在に支持するとともに、振子梁上3に左右の空気バネ11を介して車体2を載置してなる鉄道車両の車体傾斜装置において、空気バネ11を伸縮するための空気バネ駆動装置24・25および空気バネ11の高さを計測する空気バネ高さレベル装置26・27ならびに空気バネ駆動装置24・25を介して空気バネ11の高さを制御する空気バネ高さ制御装置21〜23を設け、曲線路通過時に空気バネ高さレベル装置によって計測される空気バネ高さに基づいて振子機構4により車体2が傾斜する方向へさらに車体2が傾斜するように空気バネ11の高さを制御できるようにした。
(もっと読む)
懸架装置
【課題】車両の走行状態に応じたばね定数の変更を容易に実現すること。
【解決手段】この懸架装置100は、第1及び第2緩衝装置101、102を備える。第1及び第2緩衝装置101、102は、気体が内部に閉じ込められて荷重を支持する第1気室11、12及び第2気室21、22を備える。また、第1及び第2緩衝装置101、102は、第1気室11、12と第2気室21、22とで支持され、かつ第1気室11、12と接触する部分の荷重支持面積A1は、第2気室21、22と接触する部分の荷重支持面積A2よりも大きい第1及び第2荷重伝達部材31、32を備える。そして、第1緩衝装置101の第1気室11と第2緩衝装置102の第2気室22とは第1連通通路51で接続されるとともに、第1緩衝装置101の第2気室21と第2緩衝装置102の第1気室12とは第2連通通路52で接続される。
(もっと読む)
懸架装置
【課題】車両の走行状態に応じたばね定数の変更を容易にすること。
【解決手段】この懸架装置100は、第1及び第2緩衝装置101、102を備える。第1及び第2緩衝装置101、102は、気体が内部に閉じ込められる第1気室11、12及び第2気室21、22とを備え、第1気室11、12と第2気室21、22とは対向配置される。また、第1及び第2緩衝装置101、102は、第1気室11、12と第2気室21、22とに支持され、かつ第1気室11、12と接触する部分の荷重支持面積A1は、第2気室21、22と接触する部分の荷重支持面積A2よりも大きい第1及び第2荷重伝達部材31、32を備える。そして、第1緩衝装置101の第1気室11と第2緩衝装置102の第2気室22とは第1連通通路51で接続されるとともに、第1緩衝装置101の第2気室21と第2緩衝装置102の第1気室12とは第2連通通路52で接続される。
(もっと読む)
スイングジョイントを有する柔軟なリアアクスル及び対応する自動車
本発明は、縦方向のアーム(12)とクロスビーム(24)を有し、クロスビーム(24)を横切って伸び、クロスビーム(24)の中央部へ連結された、スイングジョイント(26)を形成するアームと、スイングジョイントの車両の前部へ向けられた前端部(30)を、縦方向のアームの車体への連節部に近接して上記アームへ、または縦方向のアームの車体への連節部の高さで車体(20)へ連結し、クロスビーム(24)に概ね平行な連結部材(42、50)と、車両の後部へ向けられたスイングジョイントの後端部(32)を、それぞれ車輪の支持(16)へ連結する2つの連接棒(34)とからなる、自動車用の柔軟なリアアクスルに関する。 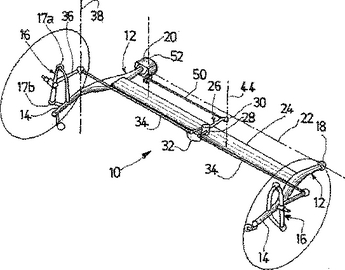 (もっと読む)
(もっと読む)
141 - 160 / 183
[ Back to top ]