
Fターム[3D301EA82]の内容
Fターム[3D301EA82]の下位に属するFターム
路面摩擦係数/ミュー (85)
Fターム[3D301EA82]に分類される特許
21 - 40 / 183
段差位置登録装置、方法およびプログラム
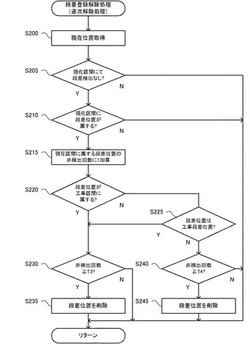
【課題】段差位置の登録されやすさを人為的な要因に応じて調整する技術を提供する。
【解決手段】段差位置登録装置であって、車両の走行時に段差が検出された回数を示す検出回数を車両走行路の位置ごとに取得する回数取得手段と、前記位置を段差位置として登録するための基準となる前記検出回数を示す検出回数閾値を、前記位置が工事区間に属するか否かに応じて設定する閾値設定手段と、前記検出回数が前記検出回数閾値に達した未登録の前記位置を前記段差位置として登録する登録手段と、を備える。
(もっと読む)
サスペンション制御装置

【課題】 車両の制動時に前輪側での輪荷重の抜けが発生するのを低減でき、制動距離の短縮化を図ることができるようにする。
【解決手段】 車両の制動時には、コントローラ17内に形成したアンチダイブ制御部19により減衰力特性をハードな状態に切換える制御を行う。制御指令演算部20では、ピッチレートセンサ16で検出されるピッチレートP(t)の変化量、即ち前輪荷重検出手段による輪荷重が減少してくると、アンチダイブ制御を行っている間であっても少なくとも伸び側の減衰力特性をソフト側に変更する制御を行う。ピッチレートP(t)の微分値dP/dtから車両のノーズダイブの終了時を判断し、アンチダイブ制御を解除することにより、車両の走行状態に応じたアンチダイブ制御を実行することができる。
(もっと読む)
キャンバ制御装置
【課題】装着されるタイヤの種類によらず、車両を十分に安定させて走行させることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両に氷雪路用のタイヤが装着されているかどうかを判断するタイヤ装着状態判断処理手段と、所定のキャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立した場合に、車輪に負のキャンバを付与するキャンバ付与処理手段とを有する。該キャンバ付与処理手段は、氷雪路用のタイヤが装着されている場合、前記キャンバを大きくする。風、路面の凹凸等によって外力を受けたり、旋回に伴って遠心力が発生したりしても、車両を十分に安定させて走行させることができる。
(もっと読む)
車両制御装置
【課題】ハイドロプレーニングが発生したときに、ハイドロプレーニングを短時間で解消することができるようにする。
【解決手段】車両のボディと、複数の車輪と、車輪にキャンバを付与するためのキャンバ可変機構と、所定のキャンバ付与条件が成立した場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段と、ハイドロプレーニングが発生したかどうかを判断するハイドロプレーニング発生判断処理手段と、ハイドロプレーニングが発生した場合に、車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。ハイドロプレーニングを短時間で解消することができる。
(もっと読む)
スタビライザ装置
【課題】 電気系統のフェイル時にも最低限必要な捩り剛性を確保できるようにする。
【解決手段】 ボールアンドランプ機構12のランププレート14をランププレート13に向けて押付ける付勢機構17を、一端側がランププレート14に当接し他端側がプランジャ21のばね受部21Aに当接する主ばね18と、ばね受部21Aと蓋体8との間に設けられプランジャ21を主ばね18とは反対方向に付勢する対向ばね19とから構成する。主ばね18のばね特性が劣化したときにもスタビライザ装置1に最低限必要な捩り剛性を確保するため、制御装置によりプランジャ21の制御基準位置を予め求めておき、電気系統等のフェイル時にはプランジャ21を前記制御基準位置に保持することができるようにする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
スタビライザ装置
【課題】 左,右のコーナに対する制御を共通化することで、構成や制御を簡略化する。
【解決手段】 第1のスタビライザバー2と第2のスタビライザバー3とを連結して捩り剛性を調整する可変剛性部4を、各スタビライザバー2,3間の相対回転運動を直線運動に変換するボールアンドランプ機構9と、直線運動を抑制するためにボールアンドランプ機構9の第2のプレート12を付勢するコイルばね15と、このコイルばね15の付勢力を調整する付勢力調整機構16とにより構成する。従って、可変剛性部4は、捩り剛性を調整する場合、付勢力調整機構16によってコイルばね15の初期荷重を小さくするか、大きくするかの調整となる。これにより、左,右のコーナに関係なく同様の制御となるから、左コーナと右コーナとが交互に続く場合でも、電動モータ19の頻繁な駆動を防止することができる。
(もっと読む)
スタビライザ装置
【課題】 捩り剛性を調整する部分の軸方向寸法を小さくして、車体に対する取付を容易にする。
【解決手段】 剛性力発生機構9は、第1のスタビライザバー2に連結され内面に第1のランプ12が形成された外径側部材11と、第2のスタビライザバー3に連結された状態で外径側部材11の内面側に配置され第2のランプ14が形成された内径側部材13と、各ランプ12,14間に収められた状態で外径側部材11と内径側部材13とに挟まれた球体15と、内径側部材13を球体15を介して外径側部材11に向けて押付けるばね部材16とにより構成した。従って、外径側部材11、内径側部材13、球体15、ばね部材16等を半径方向に並べて配設できるから、軸方向の寸法を短くしてスタビライザ装置1を小型化することができる。
(もっと読む)
搬送台車および編成搬送用台車設備ならびに編成搬送方法
【課題】搬送台車における支持モードの選択の自由度が高く、編成搬送にも適した搬送台車を提供する。
【解決手段】左右前の支持ブロックFL,FRのサスペンションシリンダ24FL,24FRを接続する前部バイパス管41と、左右後の支持ブロックRL,RRのサスペンションシリンダ24RL,24RRを接続する後部バイパス管43と、前後左の支持ブロックFL,RLのサスペンションシリンダ24FL,24RLを接続する左部バイパス管45と、前後右の支持ブロックFR,RRのサスペンションシリンダ24FR,24RRを接続する右部バイパス管47と、これらすべてのバイパス管をそれぞれ連通、遮断可能な2方向制御弁42,44,46,48とを設け、2方向制御弁42,44,46,48を操作することにより、4点支持、前左右分割の3点支持、後左右分割の3点支持、前後の2点支持、左右の2点支持、1点支持の各モードで荷を支持可能に構成した。
(もっと読む)
車両用制御装置
【課題】本発明は、車体の振動を抑える電動アクチュエータに大きな回生電力が発生しても部品の破損を防ぎつつ、当該電動アクチュエータの作動が停止しても乗り心地の悪化を抑制することができる、車両用制御装置の提供を目的とする。
【解決手段】車体の振動を抑える電動アクチュエータ4と、前記車体に設けられた座席の振動を抑える電動アクチュエータ9と、電動アクチュエータ4と電動アクチュエータ9のいずれかを駆動可能な駆動装置11と、電動アクチュエータ4の回生電力によって駆動装置11が破損するか否かを判断する判断手段10と、電動アクチュエータ4の回生電力が駆動装置11に伝達することを遮断する遮断手段とを備え、駆動装置11が破損しないと判断された場合、駆動装置11によって電動アクチュエータ4が駆動され、駆動装置11が破損すると判断された場合、駆動装置11によって電動アクチュエータ9が駆動される、車両用制御装置。
(もっと読む)
歩行者保護装置
【課題】 不必要なノーズダイブの抑制や装置コストの低減を実現した歩行者保護装置を提供する。
【解決手段】 自動車Vが他の自動車や歩行者に衝突すると、衝突検出装置15から減衰力制御装置20に衝突信号が出力される。すると、ステップS10の判定がYesになるため、減衰力制御装置20は、ステップS11で駆動電流を停止してスタートに戻る。ステップS11で駆動電流が停止されると、各ダンパ4では、磁気流体バルブの励磁が解除されることにより、MRF内の強磁性微粒子が互いに分離して減衰力が殆ど0となる。そのため、衝突の直後に歩行者40がボンネット上に倒れ込んだ場合においても、車体1が容易に沈み込んで歩行者40が受ける衝撃が効果的に抑制される。
(もっと読む)
車両用制御装置
【課題】操縦安定性の向上を図ることができる車両用制御装置を提供すること。
【解決手段】横方向状態量判断手段により横方向状態量が第一条件および第二条件を満たすと判断される場合には、第一キャンバ角調整手段によって前輪および後輪のキャンバ角が調整される。前輪および後輪のキャンバ角を調整することで、旋回性能を最大限発揮させて、操縦安定性の向上を図ることができる。一方、第一条件のみを満たすと判断される場合は、前輪または後輪のいずれか一方のキャンバ角を調整することで、不必要なキャンバ角の調整を抑制して車両が不安定な状態になるのを回避しつつ、必要な旋回性能を確保することができる。このように、必要なキャンバ角だけを調整して、車両の操縦安定性の向上を図ることができる。
(もっと読む)
車両用制御装置
【課題】旋回時の操縦安定性を確保しつつ、旋回性能の向上を図ることができる車両用制御装置を提供すること。
【解決手段】車両1の旋回状態が第1条件を満たしている場合には、左右の前輪2FL,2FRの内の旋回内輪となる車輪2のキャンバ角よりも大きいキャンバ角で左右の前輪2FL,2FRの内の旋回外輪となる車輪2にネガティブキャンバを付与する。これにより、かかる車輪2の横剛性を利用して、旋回時の操縦安定性を確保できる。また、この場合には、旋回外輪となる車輪2にキャンバスラストが発生し、車両1にヨーモーメントが作用する。これに対し、旋回内輪となる車輪2のキャンバ角は、旋回外輪となる車輪2のキャンバ角よりも小さいので、ヨーモーメントを打ち消すことはない。よって、キャンバスラストにより車両に作用するヨーモーメントを旋回力として利用して、旋回性能の向上を図ることができる。
(もっと読む)
車両の後輪操舵制御装置
【課題】わだちを走行している車両が旋回を行う場合には、後輪を前輪と同位相に操舵させる車両の後輪操舵制御装置を提供する。
【解決手段】後輪操舵装置を備えた車両における後輪操舵制御装置において、少なくとも現在位置近傍を含み、車両の走行に関わる道路情報が取得された、もしくは記憶された道路情報確認手段120と、道路情報から、車両が軌条の溝を有する路面を走行すると判断されたとき、後輪を前輪の操舵方向と同相に操舵するよう後輪操舵マップ切り替え部122とを備えている。
(もっと読む)
車両用制御装置
【課題】旋回時の操縦安定性を確保しつつ、省燃費化を図ることができる車両用制御装置を提供すること。
【解決手段】ステアリング63の操作量の絶対値が所定値以上である場合に、車輪2のキャンバ角が第1キャンバ角に調整され、車輪2にネガティブキャンバが付与される。これにより、車輪2の横剛性を利用して、旋回時の操縦安定性を確保できる。また、ステアリング63の操作速度の絶対値が減少しており且つステアリング63の操作量の絶対値が減少している場合に、車輪2のキャンバ角が第2キャンバ角に調整され、車輪2へのネガティブキャンバの付与が解除される。よって、ステアリング63の操作に基づき旋回の終了を早期に判断して、ネガティブキャンバの解除を素早く行うことができる。これにより、旋回時の操縦安定性を確保しつつ、省燃費化を図ることができる。
(もっと読む)
車両用サスペンション制御装置
【課題】 走行中に「うねり路」→「普通路」→「うねり路」と繰返すように路面状態の判定結果が反転するのを抑えることができるようにする。
【解決手段】 加速度センサ8により検出した車体1側の上,下方向の加速度信号に対して、予め決められた「閾値1」と、この「閾値1」よりも低い値として予め決められた「閾値2」とを用いる。これにより、走行路面の状態を「うねり路」であるか、「普通路」であるか否かを判定する上で、その判定値(基準値)にヒステリシスを与えるようにする。例えば、時間(t2+α)の段階で路面状態を「うねり路」と判定したときには、これ以降の処理において加速度信号(特性線11参照)が「閾値2」を越えるか否かで路面状態を判定することにより、路面状態を「普通路」として誤って判定するのを防ぐようにする。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両の姿勢制御装置
【課題】
車両の姿勢を変化させることにより操舵輪の荷重を増加させ、操舵輪を転舵され難くすることで操舵系に及ぼされる力を低減する。
【解決手段】
S100において、車両の速度Vが参照される。次に、S110において、車両の速度VがV0よりも大きいか否かが判断され、Yesの場合はS130に進み、車両4と縁石の距離dが参照される。その後S140においては、距離dがd0よりも小さいか否かが判断され、Yesの場合はS150に進み、自動ブレーキ:ON、減衰力:小と決定される。自動ブレーキがONされ、各車輪12近傍に設けられている各減衰力可変部22の減衰力が小さいものに変更される。これにより、操舵輪である車輪12FR,12FLが転舵させられ難くなるため、操舵系に及ぼされる力が低減され、操舵系を低コストで構成することが可能となる。
(もっと読む)
21 - 40 / 183
[ Back to top ]