
Fターム[3D301EC07]の内容
Fターム[3D301EC07]の下位に属するFターム
スカイフック制御 (324)
ブッシュ/タイヤ変形(弾性)を考慮 (10)
空力特性、フリクションを考慮 (9)
Fターム[3D301EC07]に分類される特許
1 - 20 / 45
車両のロール角推定方法及び装置
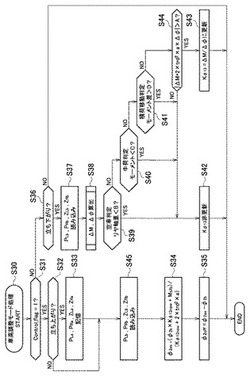
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】車体を傾斜させる際の輪荷重変動を補償し、旋回走行時の安定性を一層向上させる。
【解決手段】左右輪荷重変動算出部43により、車両の旋回走行状態及び目標傾斜角に応じて、左右輪荷重変動を推定し、限界値補正量算出部44により、車両の旋回走行状態に応じて、左右輪荷重変動時の物理的限界輪荷重に対する限界値補正量を算出する。そして、傾斜角制限部45により、物理的限界輪荷重から限界値補正量を減じて制御用限界輪荷重を算出し、左右輪荷重変動が制御用限界輪荷重を超えないように、目標傾斜角に対して制限処理を行う。左右輪荷重変動推定部43では、車両ダイナミクスモデル及びアクチュエータダイナミクスモデルに従い、左右輪荷重変動を予測する。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
サスペンション挙動推定方法
【課題】サスペンション機構の挙動を正確に把握する。
【解決手段】サスペンション挙動評価システムにおいて、解析条件取得部は、車両本体に対する鉛直方向への車輪の変位、および車輪の転舵角度を取得する。挙動推定部は、取得した車輪の変位および転舵角度を利用して、ボールジョイント36の基準スタッド軸z回りの第1揺動角θ1と、ボールジョイント36の基準垂直軸x回りの第3揺動角θ3と、を算出する。挙動推定部は、算出された第3揺動角θ3を利用して、ボールジョイント36の基準スタビライザリンク軸y回りの第2揺動角θ2を算出する。挙動推定部は、算出された第1揺動角θ1、第2揺動角θ2、および第3揺動角θ3を利用してサスペンション機構の挙動を推定する。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
車体振動推定装置
【課題】車輪速情報を用いて車体振動を常に高精度に推定し得る車体振動推定装置を提案する。
【解決手段】演算部31,32で平均前輪速VwF=(VwFL+VwFR)/2および平均後輪速VwR=(VwRL+VwRR)/2を演算し、VwF, VwRをバンドパスフィルタ処理部33,34に通して、車体共振周波数付近の成分のみを抽出して取り出し、前輪速VwFの車体共振周波数近傍振動成分fVwFおよび後輪速VwRの車体共振周波数近傍振動成分fVwRを取得する。演算部35,36では、fVwF, fVwRから前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、前輪および後輪の前後変位および上下変位間における固有の関係を基に、Xtf, Xtrから、前軸上方部の上下変位および後軸上方部の上下変位を求め、これら車体前後の上下変位から車体振動(上下バウンス速度dZv、ピッチ角速度dθp)を推定する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
サスペンション仕様評価装置
【課題】実際に即した非線形のサスペンション特性に基づいて、操舵安定性に優れたサスペンションモデルの仕様を決定できるようにする。
【解決手段】車両モデル設定処理部11は、車両モデルを構築すると共に、前輪サスペンションモデル及び後輪サスペンションモデルを複数の仕様データ毎に構築する。ロールモード解析処理部12は、仕様毎の前輪及び後輪のサスペンションモデルの組合せ毎に、車両モデルに作用するロール角ゼロにおけるピッチレートをロールモードの代用として求める。そしてこの代用ロールモードがゼロに最も近い特性を示すサスペンション仕様の組合せを、操舵安定性に優れているサスペンションモデルとして選択する。
(もっと読む)
車両空気力算出装置、車両運動解析装置及び車両サスペンション制御装置
【課題】車両が受ける空気力の作用について、さらに適切な解析を可能とすることである。
【解決手段】車両空気力算出装置10は、コンピュータで構成され、その記憶部18には風洞実験等によって得られた加速度項係数のデータ20等が記憶される。CPU12は、解析条件を取得する条件取得処理部24と、記憶部18に記憶される加速度項係数を用いて車両に作用する空気力の動的空力モデル化を行うモデル化処理部26と、車両に作用する空気力を外力としてその変動成分に関する算出を行う変動成分算出処理部28と、算出された変動成分に基づいて、車両に作用する外力をそれぞれ算出する作用量算出処理部30を含む。さらに、算出された空気力による外力を車両の運動方程式に組み込み車両の運動解析を行うこともでき、車両サスペンション制御を行うこともできる。
(もっと読む)
車両用状態推定装置、車両用状態推定方法、車両用懸架制御装置および自動車
【課題】サスペンションの状態推定をより高精度に行う。
【解決手段】車両用懸架制御装置1Aは、車両挙動予測部201と、車両挙動推定部202と、サスペンション制御部203とを備え、車両挙動予測部201で、車両に将来加わる予定の外乱(路面形状)に対する車両挙動を予測し、車両挙動推定部202において、この将来の車両挙動の予測結果を基に、その将来における車両挙動の推定に用いるカルマンフィルタのゲインを補正する。そして、車両挙動推定部202は、ゲインを補正したカルマンフィルタを用いて現在の車両挙動を推定し、サスペンション制御部203は、この推定結果に基づいて、能動型懸架装置の動作を制御する。
(もっと読む)
車両用アクティブサスペンションの制御方法及び装置
【課題】車両重量の増加を招くことなくフレームのねじれを抑制し、該フレームのねじれに起因した弾性振動や操縦安定性への悪影響を改善する。
【解決手段】各車軸1上にフレーム2をサスペンションスプリングを介して懸架すると共に、各車軸1とフレーム2との間に両者を近接離間し得るよう上下方向に拡縮作動するアクチュエータ4を装備した車両用アクティブサスペンションの制御するにあたり、フレーム2に対する各車軸1の左右位置での相対変位とフレーム2側の上下加速度とに基づき、フレーム2のねじれまで考慮して表現された車両モデルの状態方程式により走行中のフレーム2のねじれを状態変数の一要素として時々刻々推定し、その推定されたフレーム2のねじれを他の状態変数と適宜に組み合わせて制御則を決めるためのパラメータとし且つ該各パラメータが小さくなるように各アクチュエータ4をリアルタイムで制御する。
(もっと読む)
車両のサスペンション装置
【課題】 減衰力変更制御が路面からの振動を減衰することに対して追従できていない場合であっても、乗り心地の悪化を抑制できる車両のサスペンション装置を提供すること。
【解決手段】 サスペンションECU21は、バネ上加速度センサ22から入力したバネ上加速度xpb''を表す信号およびバネ下加速度センサ23から入力したバネ下加速度xpw''を表す信号を比較的高周波側の帯域にてバンドパスフィルタ処理する。そして、バンドパスフィルタ処理によって通過した最大信号振幅bと最大信号振幅aを取得する。次いで、ECU21は、最大信号振幅aに対する最大信号振幅bの比の値と予め「1」以下に設定された性能目標指数αとを比較し、b/aの値がαよりも大きいときは、制御追従性が悪化しているため、バネ上−バネ下相対速度Vが基準相対速度Vo以上のときの要求減衰力Freqを一定の要求減衰力Fconstに設定する。
(もっと読む)
サスペンション装置
【課題】 バネ上−バネ下相対速度Vの絶対値が小さい領域において乗り心地が向上された減衰力制御を行うことができるサスペンション装置を提供すること。
【解決手段】 バネ上−バネ下相対速度の絶対値|V|が基準速度V0未満ではないと判定された場合には、非線形H∞制御理論を用いて計算された減衰係数CHにしたがって減衰力が制御される。これにより減衰力発生手段が実現可能な範囲内で減衰係数が可変制御される。一方、バネ上−バネ下相対速度の絶対値|V|が基準速度V0未満であると判定された場合には、車両の乗り心地がより向上するようにCHが補正値αまたはβにより補正され、補正された補正減衰係数にしたがって減衰力が制御される。これにより、バネ上−バネ下相対速度の絶対値|V|が基準速度V0未満の微低速領域において、乗り心地を重視した制御を行うことができ、車両の乗り心地が改善される。
(もっと読む)
車両用の運転ダイナミクスコントロールシステム
この発明は、車両用の運転ダイナミクスコントロールシステムに関し、一方では目標値仕様を、そして他方では、運転状態変数を、入力データとして与えられる少なくとも1つの運転ダイナミクスコントローラを有し、また ドライバーと無関係に調整可能な車両の前および/または後車軸におけるステアリングのように、車両の原動力をコントロールし、規定し、また変更することができる複数のアクチュエータを有する。
ドライバーと無関係に調整可能なシャシ、ドライバーと無関係に調整可能なブレーキ、およびドライバーと無関係に調整可能な運転列を有し、運転ダイナミクスコントローラは、目標値仕様および運転状態変数から中央コントロール仕様を決定し、さらにアクチュエータを駆動するために操作変数内にコントロール仕様を分配する分配アルゴリズムにそれを供給する。
アクチュエータ(1、、m)の操作変数(u)に対するコントロール仕様(ν)の最適分配を提供するために、それは、現在のコントロール可能性、アクチュエータ(1、、m)の現在のアクチュエーティング速度、およびコントロール仕様(ν)の実行に対するそれらの可能性ある貢献を考慮するために操作変数(u)を生成する場合に、分配アルゴリズム(C)が、アクチュエータ(1、、m)の状態を与えられるという、この発明によって提供される。
(もっと読む)
車両の振動状態検出方法並びにこれを用いたサスペンション制御方法及び装置
【課題】サスペンション制御装置において、必要な精度を維持しつつ、必要な状態量を検出するためのセンサ数を少なくする。
【解決手段】車両の車体2と車輪3との間に懸架バネ4及び減衰力可変ダンパ5を介装する。車速センサ6及び車輪速センサ7によって検出した車速及び各車輪3の車輪速を含む車両の走行状態を表す状態量に基づいて、コントローラ8によって減衰力可変ダンパ5の減衰力を調整して、車体2に姿勢制御及び振動制御を行なう。このとき、車速及び各車輪3の車輪速に基づいて、車軸路面間の相対変位を抽出し、抽出した車軸路面間の相対変位に基づいて、車両の振動状態を演算することにより、必要な精度を維持しつつ、車体2の上下加速度センサ等を不要として、必要な状態量を検出するためのセンサ数を少なくすることができる。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】車両を旋回させる際に消費されるエネルギーを小さくすることができ、ヨーレートを十分に大きくすることができるようにする。
【解決手段】車両のボディと、車輪WLF、WRF、WLB、WRBと、車輪にキャンバ角を付与する車輪駆動部と、車両を操舵するために操作される操舵部材と、操舵部材の操作量を検出する操作量検出部と、検出された操作量に基づいて、車両が旋回させられていると判断されると、車輪のうちの後輪に、操舵方向と反対側にタイヤを傾ける方向のキャンバ角を付与するキャンバ角付与処理手段とを有する。車両が旋回させられていると判断されると、車輪のうちの後輪に、操舵方向と反対側にタイヤを傾ける方向のキャンバ角が付与されるので、ヨーレートを十分に大きくすることができる。
(もっと読む)
車両のロール角推定方法及び装置
【課題】車高調整非実行時のロール角を推定することが可能な方法及び装置を提供する。
【解決手段】左右サスペンションの自動車高調整開始時の一定時間前から終了時の一定時間後までの任意の異なる2つの時点の各々において測定した各変位及び各内圧値から、それぞれ第1及び第2のロール角と該左右サスペンションによる第1及び第2のロールモーメントとを算出し、該ロール角及びロールモーメントから、該サスペンションを装着した車両固有のロール剛性係数を算出する。該サスペンションが示し得る内圧値をパラメータとして予め求めた複数個の変位特性の内、該左右サスペンションの測定内圧平均値に対応する変位特性を、該自動車高調整非実行時の該左右サスペンションに共通の変位特性として選択する。そして、該第2のロール角及びロールモーメント、該ロール剛性係数、及び該選択した変位特性に基づき該自動車高調整非実行時のロール角を求める。
(もっと読む)
車両用路面変位推定装置
【課題】車両のアクティブ・サスペンション・システムにおける既存のセンサを利用しながら、計算量が少なくて済み、十分な応答性が得られる路面変位の推定装置を提供する。
【解決手段】アクティブ・サスペンション・システムのアクチュエータの制御則として、少なくとも、該アクチュエータから制御対象である車体及び車輪への伝達エネルギを表す項と、該車体及び車輪の振動状態を表す項と、該車体及び車輪の全エネルギ収支を表す項とを、有する関数の積分を最小化するようなものを用いる。この場合、路面変位の推定誤差による悪影響が軽微なものになるので、そのための推定演算式を以下の簡易式(式A)に置き換える。 q0 = α・M1・q1″/K1 ・・・(式A)
但し、αは補正係数、M1はばね下部材3の質量、q1″はばね下部材3の加速度、K1はばね下部材のばね定数である。
(もっと読む)
サスペンション制御装置
【課題】アクティブ・サスペンションの制御装置において、車両の走行に関する各種の状態に応じてサスペンションの制御特性を変更する。
【解決手段】アクチュエータ2の制御則は、アクチュエータ2から車体及び車輪に伝達されるエネルギに重み係数を付加した項と、制御性能の評価を与える関数の項との和の積分である評価関数を最小化する最適制御則である。制御手段10は、制御則に従ってアクチュエータ2を制御すると共に、検出手段11,12,13によって検出された各種の状態に応じて制御則の重み係数を変更する。
(もっと読む)
1 - 20 / 45
[ Back to top ]