
Fターム[3F072AA08]の内容
Fターム[3F072AA08]に分類される特許
61 - 80 / 127
飲料用容器保持装置及び該保持装置を用いた飲料容器受け渡し搬送装置
【課題】飲料容器の搬送中でも容器の姿勢を保持でき、他の飲料容器保持装置へ受け渡しが可能な受け渡し搬送装置。
【解決手段】回転体の半径方向に進退可能なアーム部材と、一対の回転軸23と、該一対の回転軸に夫々回転自在に軸支された一対のグリップアーム21とから構成され、前記アーム部材は、前記回転体内側方向にテーパ部を備え、グリップアーム21の回転軸に対して容器支持部と反対側に、アーム部材に対して対称にグリップアーム21の容器支持部が飲料容器と離接する方向に駆動させる駆動手段を設けるとともに、グリップアームにアーム部材のテーパ部を係止する突起部22bを設け、前記駆動手段によってグリップアーム21を飲料容器を支持するように駆動させて前記アーム部材のテーパ部をグリップアームの突起部22bで係止して、グリップアーム21の容器支持部及びアーム部材先端の当接部材の3点で飲料容器を支持する。
(もっと読む)
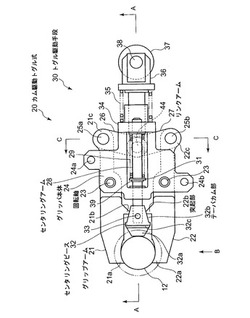
2次元移動装置及び搬送装置

【課題】2次元経路で或る機構の固定先を移動可能な2次元移動装置を提供する。
【解決手段】垂直移動ユニット部50の一方の端に配された下板56と、水平移動ユニット部40及び垂直移動ユニット部50の滑動をそれぞれ制動する水平ブレーキ部42及び垂直ブレーキ部47a、47bとを備え、さらに、レールの両端側に、それぞれ駆動プーリ35及び従動プーリ34が軸支され、従動プーリ46及び従動プーリ45が直線経路の中心寄りに軸支され、1本のワイヤ37が、垂直移動ユニット部50の一方の端部近傍から延出され、従動プーリ46、従動プーリ34、駆動プーリ35及び従動プーリ45にこの順で巻き架けられて、垂直移動ユニット部50の他方の端部近傍に接続されており、駆動プーリ35を回転駆動する一方で、水平ブレーキ部42及び垂直ブレーキ部47a、47bを択一的に作動させて、水平移動ユニット部40と垂直移動ユニット部50とを個別に滑動させる。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
ボトル容器起立整列搬送装置
【課題】ボトル容器のトップ部とボトム部の向きを検出し、その検出信号に基づいて横転一列状態の各々ボトム容器の起立操作を制御して確実にボトル容器をトップ部を上にしてコンベア上に1個ずつ起立整列させて搬送できるようにする。
【解決手段】中空ボトル容器1を搬送する横転一列搬送手段2と容器を1個ずつ横転した状態で導入し受け取る受取凹部5を外周側に複数等間隔に備える回転体4と受取凹部の通過下側に受取位置から起立操作位置直前まで配置された第1容器保持板10と起立操作位置から起立搬送位置直前まで前記第1容器保持板よりも低位に配置された第2容器保持板11とを備える起立整列搬送用回転ターレット3と前記起立操作位置に受取凹部内に導入した容器の胴部下側を横転状態から起立直前状態まで支持し且つ容器導入前後方向に前進後退移動可能な支持杆6と起立操作位置直前に配置した容器向き検知部8とを備える。
(もっと読む)
ホイール垂直調整装置を備えるスターホイール搬送装置
周縁において実装される複数の把持装置(3)を有するスターホイール(2)と、回転駆動軸(8)と、前記ホイール(2)を前記駆動軸(8)に結合するハブ(10)とを備える物品搬送装置(1)であって、前記スターホイール(2)を前記ハブ(10)に結合する調節可能な係合装置(22)を備え、前記係合装置(22)の各々は、前記ハブ(10)に設けられる孔(26)内に締着されるネジ部(25)を有し、前記ハブ(10)の上面(28)から突出する構造体(24)と、前記ハブ(10)の下面(31)から突出するヘッド部(34)と、中央孔(30)とを有するドリフトボルト(23)と、前記ドリフトボルト(23)の前記ヘッド部(34)および前記ハブ(10)の前記下面(31)間に挿入され、所定の厚さ(T3)を有し、それにより前記スターホイール(2)が前記ハブ(10)に対する所定の間隙(C)を介して前記ドリフトボルト(23)の上面(40)に配置されるよう構成されるワッシャ(36)と、前記孔(30)内に実装され、前記ドリフトボルト(23)から突出し、前記ホイール(2)に設けられる孔(39)内に締着されるネジ部(38)を有し、これにより前記ホイール(2)を前記ハブ(10)に係合するボルト(37)とを有することを特徴とする。 (もっと読む)
容器処理方法およびその装置
【課題】 複数の処理を一台の成形装置で簡単な機構により行うことができ、処理ヘッドの配置スペースを確保することを目的とする。
【解決手段】ポケット3として前記回転テーブル2の円周方向に配置された第一ポケット3aと第二ポケット3bとを設けておき、容器1を、第一ポケット3aに供給して保持させ、その第一ポケット3aに対応して設けられた第一の成形ヘッド5aにより、前記第一ポケット3aに供給された容器1に第一の成形処理を施し、その第一の成形処理が施された容器1を、第一ポケット3aに保持されたまま前記回転テーブル2による搬送を続け、さらに第一の成形処理が施された容器1を中継手段10により前記第一ポケット3aに隣り合う第二ポケット3bに移し替えて、次いで前記容器1を前記第一ポケット3aに対する容器の供給位置6を越えて搬送する間に、その第二ポケット3bに対応して設けられた第二の成形ヘッド5bにより容器1に第二の成形処理を施す。
(もっと読む)
薄肉容器の搬送装置及び方法と搬送用保持装置
【課題】可撓性がある本体を有する薄肉容器、キャップ付き薄肉容器の搬送装置および搬送方法を提供する。
【解決手段】本発明の薄肉容器の搬送装置は、受け渡し側に配置された受け渡し装置312と、受け取り側に配置された受け取り装置316とを備える。受け渡し装置312が、ネックリング115の周壁側面における、角部を含む一部分を保持するための保持機構、即ちグリッパ313を備える。受け取り装置316が、ネックリング115の周壁側面における、他の角部を含む他の部分を保持するための保持機構、即ちグリッパ317を備える。
(もっと読む)
キャップ付き薄肉容器の搬送装置及び搬送方法
【課題】可撓性がある本体を有し自立安定性が低い薄肉容器にキャップを取付けた状態で確実に受け渡すことができるように構成された搬送装置を提供する。
【解決手段】キャップ付き容器の搬送装置310は、受け渡し装置312と、受け取り装置316とを備える。受け渡し位置において、受け渡し装置312は、薄肉容器104のネックリング115の下方の部分を保持するためのネックリング保持機構、キャップ160の外周部分を保持するためのキャップ保持機構のいずれか一方を備え、受け渡し位置において、受け取り装置316は、ネックリング保機構、キャップ保持機構の他方を備えることを特徴とする。
(もっと読む)
薄肉容器及び薄肉容器の搬送装置及び搬送方法
【課題】可撓性がある本体を有する薄肉容器と、薄肉容器及びキャップ付き薄肉容器の搬送装置および搬送方法を提供する。
【解決手段】本発明の薄肉容器101は、保形性がある口部112と、可撓性がある本体113とを有する。キャップ160を取付けるためのねじ部114と、ねじ部114の下方に設けられキャップを取付けたときにキャップより下方に位置する上方ネックリング115と、上方ネックリング115より下方に位置する下方ネックリング116とが、口部112に設けられる。ねじ部114と上方ネックリング115は、上下方向に互いに間隔を隔てて配置され、上方ネックリング115と下方ネックリング116は、上下方向に互いに間隔を隔てて配置される。
(もっと読む)
薄肉容器及びキャップ付き薄肉容器の搬送装置及び方法
【課題】可撓性がある本体を有する薄肉容器、キャップ付き薄肉容器の搬送装置および搬送方法を提供する。
【解決手段】薄肉容器108には、口部112にキャップ160を取付けたときにキャップ160より下方に位置するネックリング115が配置される。薄肉容器108の搬送装置は、受け渡し装置312と、受け取り装置316とを備える。受け渡し装置312は、ネックリング115下方の口部の筒状部分112−1における上下方向の部分のうちの一方を保持するための保持機構、即ちグリッパ313を備える。受け取り装置316は、ネックリング115下方の口部の筒状部分112−1における上下方向の部分のうちの他方を保持するための保持機構、即ちグリッパ317を備える。
(もっと読む)
ネックリングを有する薄肉容器の搬送装置
【課題】可撓性がある本体を有する薄肉容器の搬送装置を提供する。
【解決手段】薄肉容器の搬送装置は、ネックリング115を保持するためのネックリング保持機構と、薄肉容器102の口部112にキャップ160を取付けるキャップ取付部とを有する回転式のキャッピング装置222と、ネックリング保持機構により容器を保持した状態において、キャップを取付けた容器を保持して受け取るための容器受け取り機構と、キャップを取付けた容器を回転移動させる容器移動部とを有する回転式の中間搬送装置224と、容器受け取り機構によりキャップを取付けた容器を保持した状態において、キャップを取付けた容器を受け取ってホルダ170に配置し、ホルダを移動させるホルダ移動部を有するホルダ搬送装置232とを備える。
(もっと読む)
プリフォーム検査装置
【課題】プリフォームを保持する保持ポケットを昇降させることにより、プリフォームを吸着する吸着ヘッドを昇降させる必要がないプリフォーム検査装置を提供する。
【解決手段】プリフォーム1の口部1aを吸着ヘッド25で真空吸着して、吸着ヘッド25を自転させながら公転させるメインロータ20を備え、メインロータ20は、プリフォーム1のつば1dを支持する支持部24aを有するとともに上下方向に移動可能な複数の保持ポケット24と、保持ポケット24と同心に上方に設けられプリフォーム1の口部1aに当接する吸着ヘッド25とを備え、保持ポケット24によりプリフォーム1のつば1dを支持してプリフォーム1を上昇させ、プリフォーム1の口部1aを吸着ヘッド25に当接させ、保持ポケット24によりプリフォーム1のつば1dを支持しながら吸着ヘッド25によりプリフォーム1を吸着するようにした。
(もっと読む)
物品搬送装置
【解決手段】 自ら開閉作動をしないグリッパBを備えた上流側ホイールHaと、開閉機構を有するグリッパAを備えた下流側ホイールHbとを備え、両ホイールが相互に隣接する受け渡し位置において、グリッパBからグリッパAにペットボトル1を受け渡すようになっている。
ここで、上流側ホイールまたは下流側ホイールが異常停止すると、制御手段は下流側ホイールに設けられた退避手段Cを制御して、グリッパAを使用状態から退避状態に切り替え、グリッパAの第1、第2把持部材23、24の開度を使用状態における両把持部材の開度より大きくする。
これにより、上流側グリッパが把持するペットボトルと、第1、第2把持部材との干渉を防止することができる。
【効果】 設備を大型化することなく、一方のホイールが異常停止しても、他方のホイールを継続して運転することが可能である。
(もっと読む)
スターホイール装置
【課題】 清掃作業を容易に行えるスターホイール装置を提供する。
【解決手段】 本発明は、物品を処理する処理部とコンベアとの間で物品を円弧状の搬送経路に沿って搬送するスターホイール装置であって、スターホイール1と、スターホイール1を支持する支持部材2とを備える。スターホイール1と支持部材2とは、スペーサ3によって間隙を置いて配置され、スターホイール1は、支持部材2へのアクセスを可能にする貫通孔1fを有する。スターホイール1の上方から加熱された水等を含む洗浄液を供給する洗浄液供給部6をさらに備えることが好ましい。
(もっと読む)
口栓の方向規制装置
【課題】容器と口栓との間に一定の方向性が要求される場合に、口栓あるいは容器ないしそれら両者の方向規制のために適用される口栓の方向規制装置に関する。
【解決手段】
円盤状のフランジ部に水平な切り欠け部を有する口栓を口栓押さえと口栓受けで保持する口栓保持手段と、前記口栓受けを昇降させる昇降手段と、前記昇降手段を回転させる回転手段と、上昇を許容する弾性手段と、前記口栓保持手段のフランジ部の外周方向に、口栓の周方向の位置を検知する検知手段と、検知した信号により口栓の回転を停止させ、口栓の周方向の位置が規制される停止手段とを備えた口栓方向規制装置であって、前記回転している口栓のフランジ部の水平な切り欠け部を係止させ、検知する位相ツメを検知手段に備え、前記位相ツメで検知した信号により口栓の回転を停止させる電磁クラッチが停止手段に備えたられていることを特徴とした口栓の方向規制装置。
(もっと読む)
容器搬送装置
【課題】電子線殺菌装置に使用した場合に、電子線の照射位置で容器2を自転させる必要を無くし、処理能力を向上できるようにする。
【解決手段】両端にネックグリッパ4が取り付けられた主軸部材30に、その軸線と直交する方向を向けて固定連結部材32を固定し、その外周に回動可能に回動連結部材36を取り付け、一つの主軸部材30の固定連結部材32と隣接する主軸部材30の回動連結部材36とを、主軸部材30の軸線と直交する線を中心に回転できるように連結する。これを連続して無端状搬送体6を構成する。2つのスプロケット8、10および円弧状ガイド12、14と直線ガイド16、反転ガイド18で循環移動経路20を構成する。主軸部材30に設けた上下左右のローラ44、46、52、54を、反転ガイド18のカムレール18a、18b、18c、18dに係合させて反転させる。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
断面が円形でない容器を搬送する装置
断面が非円形の容器(2)を搬送する装置(1)であって、
−少なくとも2個の入力直線コンベヤ(3a、3b)であって、少なくとも2つの別個の搬送流れはこのコンベヤを介して装置に到達するコンベアと、
−直線入力コンベヤから容器を受容し、これらの容器を1つのコンベヤ(5)上の出力部で、1つの出力流れにて解放するための複数の星形コンベヤ(4a、4b、6)と、
−複数の流れが1つの搬送流れに合流する範囲で前記容器を案内する手段(7、9、14)とを組み合わせて備え、案内手段は、1つの流れに向けての容器の正確な搬送と方位付けを確保する形状となっている。  (もっと読む)
(もっと読む)
容器保持装置及びこれを備えたスターホイール式搬送装置
【課題】スターホイール上の余剰スペースを有効に活用してグリップの位置調整に必要な機構部品を容易に設置することが可能な容器保持装置を提供する。
【解決手段】周方向に並べられた状態でスターホイール4の同一のポケット6内に突出し、先端の爪部22cによりボトル2のフランジ2eを保持可能な一対のグリップ22A、22Bと、一対のグリップ22A、22Bのそれぞれをスターホイール4の回転中心線と平行な支点軸線Qの周りに回転させて爪部22cの位置を変化させる調整機構23とを容器保持装置に設ける。支点軸線Qは複数のポケット6間に挟まれた領域に設定する。周方向一方の側Saに配置される一方のグリップ22Aの支点軸線Qは周方向の他方の側Sbにてポケット6に隣接する領域に設定し、他方の側Sbに配置される他方のグリップ22Bの支点軸線Qは、一方の側Saにてポケット6に隣接する領域に設定する。
(もっと読む)
非円形断面型コンテナの搬送装置
【課題】空間占拠を格段に減らし、コンテナの搬送精度を上げる。
【解決手段】この装置は、2つの搬入コンベヤと、2つの別個の搬送流れを再統合する再統合スターホイール5と、再統合スターホイール5と共働する補助スターホイール6と、再統合スターホイール5に装着され、コンテナが再統合スターホイール5に転送される前に、コンテナがピットに対して正確な方向決めがなされている状態にするために、補助スタホイール6の対応ピットに収納されているコンテナに作用する第一の連結手段50と、補助スターホイール6に装着され、再統合スタホイール5が回転している間、コンテナをピットに対して正確な方向決めが維持されるように、再統合スタホイール5の対応ピットに収納されているコンテナに作用する第二の連結手段とからなる。第一、第二の連結手段50,60は、コンテナ2が統合エリアに到達した時点で作動する。
(もっと読む)
61 - 80 / 127
[ Back to top ]