
Fターム[3F072AA09]の内容
Fターム[3F072AA09]に分類される特許
1 - 20 / 28
ピックアップ装置
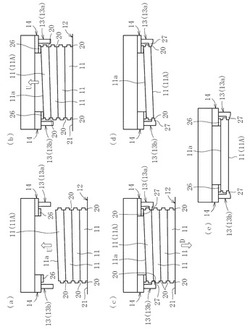
【課題】上下方向に複数枚のトレイが積み上げてのその積層体が傾いても、最上段のトレイを安定して順次ピックアップしていくことができるピックアップ装置を提供する。
【解決手段】上下方向に積み重ねられた複数のトレイ11に対して、その最上段トレイ11Aをピックアップするピックアップ装置である。上下方向に積み重ねられた複数トレイ11が載置される昇降台12と、昇降台12の上昇によって上昇してきた最上段トレイ11Aを保持する複数のトレイ保持機構13と、水平面に対する最上段トレイ11Aの傾斜に対応して各保持機構位置を上下方向に変位させる倣い機構14とを備える。
(もっと読む)
農作物用搬送収納装置及び収穫玉葱処理装置

【課題】コンテナを所定角度下降させる際の農作物検出部の設定間隔とは無関係に、最終的なコンテナ内での農作物の盛り付け状態を適宜に設定できる。
【解決手段】コンテナ載置部12と、コンテナ載置部12を昇降させる昇降部13と、コンテナ載置部12に載置されたコンテナ11内に農作物を送り込む送出コンベヤ14と、送出コンベヤ14の送出端14Aをコンテナ11の開口11A内で移動させるスライド機構部15と、送出コンベヤ14の送出端14Aに設けられ、コンテナ11内に堆積した農作物との間隔を検出する検出部16とを備え、検出部16は、検出部16と農作物との間隔を検出し、この検出間隔を第1の設定間隔と比較して昇降部13を作動させる第1の検出部16Aと、検出部16と農作物との間隔を検出し、この検出間隔を第2の設定間隔と比較してスライド機構部15を作動させる第2の検出部16Bを備える。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
物品移載装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
仕分装置
【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更と側方への搬出を行うことができ、可動機構が少なくスペースも小さい仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与える接触駆動機構によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、接触駆動機構が、ボールコンベヤ100面に対して回転運動を行う回転駆動部120と、該回転駆動部120の接触面内で直線運動を行う直線駆動部130とを有すること。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
枠付き容器用物品払出し装置
【課題】払出し容器から物品を自動的に払い出すことができる払出し容器用物品払出し装置を提供する。
【解決手段】本発明は、ボックスパレット20などの枠付き容器内に積載された物品30を払い出すための物品払出し装置1において、ボックスパレットが載置される第1部分3、および、第1部分の一縁部から略垂直に延びる第2部分4からなる、傾動可能に支持された本体2と、第2部分に設けられた、第1部分の側の面を搬送面とするコンベヤ機構8と、ボックスパレットが第1部分に載置された状態で本体が払出し姿勢に傾動されたときに、ボックスパレットにおける左右の垂直側板22a、22cを支持して、ボックスパレットを固定し物品のみを払出すと共に、ボックスパレットがコンベヤ機構の搬送面と非接触状態となるようにする支持部材9、10とを備えることを特徴とする。
(もっと読む)
海苔抜取設備
【課題】ダンボール箱から海苔をキズ付けずに取り出すことができ、作業効率を向上させた海苔抜取設備を提供することを目的としている。
【解決手段】本発明の海苔抜取設備10は、海苔16が箱詰めされたダンボール箱14の上面開口と底面を上下反転させる反転手段20と、前記ダンボール箱14を可動テーブル64まで移動し、前記可動テーブル64上から前記ダンボール箱14を持ち上げる移動手段40と、前記可動テーブル64に海苔の少なくとも一部を載置面から突出させた位置に調整する昇降手段60と、空のダンボール箱14を上下反転させて外部へ払い出す払出手段80と、を備えたことを特徴としている。
(もっと読む)
野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置
【課題】廉価で比較的確実に段ボール箱の変形や破損を検知して次行程に搬送できる野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置を提供。
【解決手段】野菜又は青果が梱包された段ボール箱2と、段ボール箱を搬送する搬入コンベア4と、搬入コンベアから移送された段ボール箱を所定位置に停止させる待機部10と、待機部の段ボール箱を把持するロボット13と、ロボットに把持された段ボールが積み込まれる搬送用台車15とを有するピッキング装置1及び、ピッキング装置に用いる幅検査装置5であって、待機部の前行程に一対の当接板54,56を段ボール箱の両側面4bに当接させ、一対の当接板の距離Hが予め定められた距離以上の場合には、待機部外7,8へ搬出し、未満の場合には、待機部へ搬送する判別機6を設ける。
(もっと読む)
搬送装置
【課題】農作物の損傷を防止しつつ、農作物を容器内に適切に収容できる搬送装置を提供する。
【解決手段】搬送装置である規格内玉葱搬送手段51は、搬送手段55と、この搬送手段55を移動させる移動駆動手段56とを備える。搬送手段55の両端部には、搬送手段55からの玉葱Tを受け入れて下り傾斜方向に向けて搬送する端部搬送手段71を回動可能に設ける。端部搬送手段71の下方には規格内コンテナを保持する載置手段75が位置する。この載置手段75を回動させる回動駆動手段82を設ける。端部搬送手段71には距離検知手段91を設け、制御手段92が距離検知手段91の検知に基づいて回動駆動手段82および移動駆動手段56を制御する。
(もっと読む)
物体の移し替え装置
【課題】 直方体状の物体を、第1移送手段の第1容器から第2移送手段の第2容器に反転して適確に移し替えることが可能な物体の移し替え装置を提供する。
【解決手段】第1・第2移送手段2・4の間に、これらと同一方向へ指向するとともに回転中心線を同一にしかつ垂直面内で正逆回転可能に配設された2本の第1・第2回転軸9・10と、第1回転軸を正逆回転させる第1回転軸駆動手段11と、第2回転軸を正逆回転させる第2回転軸駆動手段12と、第1回転軸にこれと直交する方向へ延びて固着されて第1移送手段と第2移送手段の上方位置との間を旋回移動可能な第1回動部材13と、第2回転軸にこれと直交する方向へ延びて固着されかつ物体を第1・第2容器を介して第1回動部材とで挟持して第1移送手段から第2移送手段に旋回移動可能な第2回動部材14と、第1回動部材に装着されて第1容器をクランプする第1クランプ手段21と、第2回動部材に装着されて第2容器をクランプする第2クランプ手段28と、を備えたことを特徴とする。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
ワークの搬送・加工装置
【課題】高速で安定したレンズなどのワークの搬送動作を行うことのできる搬送機構を備えたレンズの搬送・加工装置を提案すること。
【解決手段】レンズの搬送・加工装置1では、第1旋回アーム11によって円弧状の移動軌跡に沿って第1レンズ搬送容器21を第1位置から第2位置に搬送し、第2旋回アーム12によって円弧状の移動軌跡に沿って第2レンズ搬送容器22を第2位置から第3位置に搬送している。剛体である旋回アーム11、12によってレンズ搬送容器22、23を搬送しているので、搬送中にレンズ搬送容器21、22が振動してそこに搭載されているレンズWa、Wbにズレが生ずることが無い。旋回アーム11、12によってレンズ搬送容器21、22を高速で移動させることができる。
(もっと読む)
搬送システム及び移送装置
【課題】搬送システムを設置する際に工程や費用を抑制する
【解決手段】載置ポート130に対して所定の位置関係を有する軌道110上の位置に移送装置100を固定する。移送装置100は、軌道110上の搬送台車120に載置されたフープFを載置ポート130上に移送したり、載置ポート130上のフープFを搬送台車120に移送したりする。移送装置100は、移送装置100の固定位置に対して載置ポート130が所定の位置にあるときにフープFを適切に移送するように構成されている。
(もっと読む)
シガレットパックのための乾燥タレット
シガレットパック(10)のための乾燥タレット(13)の容量を増加させるために、その領域に、ユニットがいくつかのポケット(14、15)を備え、このポケット(14、15)は、交互に、積荷位置と荷降位置に動かされる。それによって、パック(10)の乾燥タレットでの滞在期間が、1ユニット毎のポケット(14、15)の数に応じて、増加する。 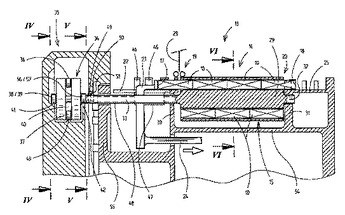 (もっと読む)
(もっと読む)
板金加工機の製品仕分け集積システム
【課題】製品の仕分け集積スペースの効率化を図ることができ、例えば、複数のシートにまたがったオーダー物や、次工程の仕分けも同時に行うことのできる板金加工機の製品仕分け集積システムを提供する。
【解決手段】板金加工機の製品仕分け集積システム100は、加工機本体20と、材料棚30と、材料棚30と加工機本体20との間で材料・製品を搬入・搬出可能な搬送装置40とを備えた板金加工機10に適用される。そして、板金加工機の製品仕分け集積システム100は、加工機本体20と材料棚30との間の領域に、加工機本体20から搬出した製品を搬送装置40により集積可能なトレイ110と、トレイ110を収容して次工程へ搬送可能なワゴン130とを備えている。
(もっと読む)
箱詰装置
【課題】トレー状のパック容器にパック詰めされた製品をコンテナやダンボール箱などに効率よく箱詰めする装置において、長期間に亘って円滑な運転を実現する。
【解決手段】左右一対の前向きの水平ガイド14、14を下端に有する昇降フレーム10と、連結ロッドを介して多数のジグザグ状のエレメントを屈曲自在に連結し、水平ガイドの下辺に沿って配設するガイド部材を介して左右の側端部を前後に摺動自在に拘束するコンベヤベルト20を備えてなり、コンベヤベルト20は、水平ガイドの後端において上方に屈曲させ、昇降フレームの上部に配設するスプロケットに掛けて垂下させる。
(もっと読む)
グリッパー装置
【課題】複数のグリッパーを備えているグリッパー装置であって、製品の間隔を変更する、構造的に単純かつ効果的なグリッパー装置の提供。
【解決手段】グリッパー5は、第1のポジションにおいては第1の所定の間隔Aを有する。グリッパー5を少なくとも1つの第2のポジションに動かすための駆動装置7が設けられており、この第2のポジションにおいては、グリッパー5は第2の所定の互いの間隔Bを有する。グリッパー装置はすべてのグリッパー間の搬送方向を横切る方向の間隔を変更することができるように形成する。
(もっと読む)
1 - 20 / 28
[ Back to top ]