
Fターム[3F072KD09]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 保持具に物品検知手段付 (37)
Fターム[3F072KD09]に分類される特許
1 - 20 / 37
パン型造粒機用の大塊処理装置
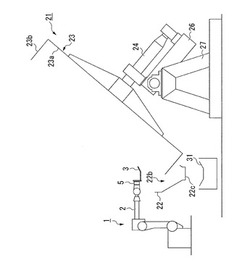
【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
部品供給装置の保持ヘッド構造

【課題】部品導入時の吸引力と部品送出時の送出力を効果的に利かせることができる部品供給装置の保持ヘッド構造の提供。
【解決手段】保持ヘッド19の保持凹部21に、導入開放部22と送出開放部47と保持壁44と底面46が設けられ、部品1を目的箇所へ送出する送出手段48が保持ヘッド19に設けられ、部品1を保持凹部21内へ導入する磁石55を、該磁石55の吸引力が部品1の重心点Gと底面46の間に作用する箇所Sに配置して、部品1を受け止める保持壁44に対する部品1の吸引力と部品1が着座する底面46に対する部品1の吸引力を発生させるように構成した。
(もっと読む)
把持装置及びワーク搬送装置
【課題】重ねられ通気性を有する板状ワークであっても確実に把持し得る把持装置及びワーク搬送装置の提供。
【解決手段】板状ワークの一方の面側に対向可能な対向面11及び該対向面11に対し該対向面11の面直方向に突出すると共に該対向面11に沿う所定方向に近接離間可能な一対の爪部12を備える把持部10と、板状ワークの一方の面側に対向面11が当接したか否かを検出する第1検出部20と、を有し、第1検出部20は、板状ワークの一方の面側に当接可能な大きさの板面21aを備えて、該板面21aが、対向面11と同一面上に位置する第1の位置と、対向面11から面直方向に突出した第2の位置と、の間において移動可能な板状部材21を有する把持装置1を採用する。
(もっと読む)
ピッキングシステム
【課題】ワークの取りこぼしを防止すること。
【解決手段】ロボット2が、コンベアによって搬送されるワークを保持する保持動作および保持したワークを所定の場所へ移動させる移動動作を行い、メインカメラ3aが、搬送路上の領域を撮像し、制御装置5が、メインカメラ3aによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2に対して指示する。また、制御装置5の重なり検出部514が、ワークの重なりを検出し、制御装置5の動作指示部515が、重なり検出部514によってワークの重なりが検出された場合に、重なったワークの保持動作をロボット2に対して指示する。
(もっと読む)
ピッキングシステム
【課題】複数のワークを向きを揃えて載置する場合に、複数のワークの保持を短時間で行うこと。
【解決手段】ロボット2a,2bは、ワークwを保持する複数の保持部23a,24a,23b,24bと、アーム先端部21a,21bに対して回転可能に設けられ、複数の保持部23a,24a,23b,24bを支持する支持部22a,22bとを備える。また、制御装置は、保持部23a,24a,23b,24bを用いて保持したワークwごとに、かかるワークwの向きが所定の向きとなるように支持部22a,22bを所定量回転させたうえでかかるワークwを所定の場所へ載置する載置動作の実行をロボット2a,2bに対して指示する。
(もっと読む)
移載装置
【課題】 被移載物を、姿勢変化を伴って載置対象物に移載する場合であっても、被移載物が不用意に落下してしまうことを確実に防止することができる移載装置を提供する。
【解決手段】 移載装置1は、移載ハンド11が起立姿勢のときに、台座3が載置される床面Fに近接・離反する方向に変位自在となるように設けられ、かつ液晶表示装置2を台座3に移載する過程で床面Fに接触するように設けられる変位部材を備え、床面Fとの接触による変位部材の移載ハンド11に対する相対的な変位に基づいて、液晶表示装置2が着座状態であるか否かを検出する着座センサ15を含み、移載ハンド11は、着座センサ15により着座状態であると検出されているときにのみ、スイッチSW1,SW2の操作によって解放動作するように構成され、着座センサ15は、移載ハンド11が起立姿勢のときに、変位部材を、床面Fに近接する方向に付勢する圧縮コイルばね94を備える。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
チューブの箱詰め装置、箱詰め方法及びチューブの箱詰め装置用作業ハンド
【課題】ロボット等でチューブの箱詰め動作を自動化するにあたり、不用意なチューブの抜き出しを確実に発見できる技術を提供する。
【解決手段】箱詰め装置は、ロボットにより作業ハンド16を移動させてチューブTを箱詰めする。チューブTは予め物品列TAの状態で整列されており、作業ハンド16は各フィンガ18にチューブTを引っ掛けた状態で物品列TAを保持し、収容箱14内に箱詰めする。両側のフィンガ18にはそれぞれ内部にフォトセンサ24が収容されており、その間のフィンガ18には径方向に貫通孔が形成されている。フォトセンサ24の検出光Lは貫通孔を通って一方から投光され、他方で受光される。箱詰め後に作業ハンド16を退出させてフォトセンサ24による検出を行い、チューブTが残存しているか否かを自動的に検出する。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
包装機への袋供給方法及び装置
【課題】横型製袋機と包装機が併設されかつ両者が連動する製袋包装機において、種々のタイプの横型製袋機と包装機の組み合わせ及び設置形態を可能とする。
【解決手段】横型製袋機から送り出された袋を位置決めする位置決めコンベア3、袋を包装機のコンベアマガジン式給袋装置に順次供給する供給コンベア39、及び位置決めコンベア3と供給コンベア39の間に配置された第1〜第3移送手段からなる。第1移送手段4,5は、位置決めコンベア3上の袋を吸着して持ち上げ、開口部を下向きとした垂直姿勢に変更する。第2移送手段21,22は第1移送手段4,5に保持された袋を挟持部材27で挟持して受け取り、所定位置に水平移送すると同時に袋を回転させて袋面を前記供給コンベアの送り方向に向ける。第3移送手段35は第2移送手段21,22に保持された袋を吸着して受け取り、水平姿勢に変更し開口部を送り方向に向けて前記供給コンベア39上に置く。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
分離装置
【課題】本発明は半導体検査装置において半導体素子を一つずつ分離して反り問題を解決するための分離装置を開示する。
【解決手段】この分離装置は動力源、押下台、第一スウィングアームセット、第二スウィングアームセット、第三スウィングアームセット、第一グリッパーセット、第二グリッパーセット、第一プッシュブロック、第二プッシュブロック及びストップアームからなる。動力源を駆動して押下台を下降させて各スウィングアームセットを押さえ付けることによって、第一グリッパーセット、第二グリッパーセット及びストップアームで分離作業を行う。この分離装置は動力源のみを有すると共にこの動力源で各部材を動かして分離を行うので、分離速度を加速してフィードシステムの体積を縮小することができる。
(もっと読む)
電子部品の自動分類機におけるノズルヘッドの作動機構
【課題】より高速でのノズルヘッドの移動を可能にし、しかも構造が簡単で、より小型化を可能とした、電子部品の自動分類機におけるノズルヘッドの作動機構を提供する。
【解決手段】ノズルヘッドの作動機構は、長リンクに相当する旋回アーム(2)及びリンクロッド(3)と、短リンクに相当し、旋回アーム及びリンクロッドの近位端間及び遠位端間をピボットを介して結ぶ一対の揺動アーム(8、9)と、を含む平行四辺形リンク機構(10)と、旋回アーム及びリンクロッドの遠位端間を結ぶ一方の揺動アームに、その延長線上において設けられたノズルヘッド(11)と、旋回アーム及び他方の揺動アームの近位端のピボットが共通の定置軸線(12)を有し、平行四辺形リンク機構を機能させるべく旋回アーム及び他方の揺動アームをそれらの共通の定置軸線を中心に別々に回転させるためのサーボモータ(13、14)と、を含む。
(もっと読む)
タバコ産業で使用される、ロッド状エレメントで充填された区画トレイの内容物の取り出しを行うためのデバイス
【課題】ロッド状エレメント(25)で充填した区画トレイ(2)の内容物の取り出しを行うためのデバイスであって、一つの平面内に平行に配置された、充填済トレイ(2)用の入口コンベア(1)及び空のトレイ(2’)用の出口コンベア(3)を有し、更に、支持プレート(6)が設けられた、トレイ(2)用の転向ユニット(4)と、トレイ(2’)用の転向ユニット(12)を有する、デバイスを提供する。
【解決手段】デバイスには、トレイ(2、2’)用の直線的輸送機(14)が設けられており、この直線的輸送機は、コンベア(1、3)の平面に対して垂直な平面に配置されている。直線的輸送機には、トレイ(2)用のグリップユニット(16)及びトレイ(2’)用のグリップユニット(17)が設けられている。輸送機(14)の下には、グリップユニット(16)の作動ゾーン内に、取出コンベア(24)が配置されている。この取出コンベア(24)の端部は、不動のスロート(27)の入口のところに配置されている。トレイ(2)用の転向ユニット(4)には、エレメント(5)で形成された支持プレート(6)が設けられている。これらのエレメントの数は、トレイ(2)の区画(8)の数と対応し、エレメント(5)間の距離は、トレイ(2)の内壁(9)の厚さと対応する。直線的輸送機(14)はガイド(15)を含み、このガイドに、二つのグリッパ(22、23)を持つキャリッジ(20、21)の形態の二つの別々のグリップユニット(16、17)が配置されている。スロート(27)の壁は移動可能であり、整合ユニット(29)を形成し、スロート(27)の下には移動可能支持体(30)が配置されている。取出コンベア(24)とアウトフィードコンベア(28)との間のスロート(27)の垂直壁(26)には、揺動バルブプレート(32)が設けられている。更に、デバイスには、トレイ(2’)の区画(8)のクリーニングを行うための機構(33)が設けられている。この機構(33)は、回転するように組み立てられたブラシ(34)を含む。これらのブラシは、出口コンベア(3)の始端ゾーンに、グリップユニット(17)の下に配置されている。
(もっと読む)
移載装置
【課題】移載対象物の撓みを抑制すると共に、移載能率の向上を図ることができる移載装置を提供する。
【解決手段】ガラス基板を搬送するハンド装置から受け渡されたガラス基板を支持すると共に、支持したガラス基板を搬送ライン2に移載する移載装置であって、ハンド装置の移動経路上に位置し、ガラス基板を支持する支持位置と、上記移動経路上から退避する退避位置との間を、互いに独立して駆動される複数の支持装置4を有するという構成を採用する。
(もっと読む)
移送装置
【課題】保存箱からキャップシール装着装置へのスタック体の移送を自動化でき得る移送装置を提供する。
【解決手段】移送装置は、スタック体100を吸引保持する吸引ヘッド14や、吸引ヘッド14を移動させる移動機構、保存箱内のスタック体100の位置を検出するレーザセンサ40、移動機構等を制御する制御部などを備えている。吸引ヘッド14の先端には、スタック体100の長軸方向に並んだ複数の吸引ノズル30と、レーザセンサ40が取り付けられている。制御部は、レーザセンサ40での検出結果に基づいて、吸引ノズルが保存箱内のスタック体100に接触する位置まで吸引ヘッド14を移動させた後、吸引ノズル30でスタック体100を吸引保持させる。その後、吸引ヘッド14を移動させることで、スタック体100を移送させる。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
長尺ウレタン仕分け装置及び長尺ウレタン仕分け方法
【課題】切れ目が入れられた長尺ウレタン材料を所定長さの長尺ウレタン製品に切り離してから、各長尺ウレタン製品を仕分けて収容するまでの工程において、作業者の工数を減らすことが可能な長尺ウレタン仕分け装置を提供する。
【解決手段】切断装置により切断箇所に切れ目が形成された長尺ウレタン材料Aを載置する載置台1と、この載置台1に載置されている長尺ウレタン材料Aの各ブレード部分を個別に吸着するための複数の吸着ユニット51と、この吸着ユニット51を長尺ウレタン材料の長手方向に沿って移動させるためのボールネジ機構58と、切り離されたブレードを収容するための収容装置60と、この収容装置60に形成された所定の収容箇所に複数の吸着ユニット51を移動させるための駆動部と、所定の収容箇所にブレードを収容できるように、ボールネジ機構58、駆動部、吸着ユニット51の動作を制御する制御部と、を備えている。
(もっと読む)
ワーク積載方法
【課題】スペースを広くすることなくロボットとパレット及びパレットを取り囲む光電管柱等との干渉を防止して装置の大型化及び装置コストの増大を防止する。
【解決手段】第1のパレット4から取り出したガラス3を第2のパレット5に移し替えるワーク取り出し装置7で、このワーク取り出し装置7を手首部分6に取り付けたハンドリングロボット2とこれに対向する第1のパレット4Jとの間で、且つ、該ハンドリングロボット2に対向する位置から前記第2のパレットの走行方向にオフセットさせた位置に前記第2のパレット5を配置して、前記オフセット側とは反対側からガラス3を第2のパレット5に積載させる。
(もっと読む)
1 - 20 / 37
[ Back to top ]