
Fターム[3G093CB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 車速・速度状態 (484) | 高車速・高速時 (91)
Fターム[3G093CB03]に分類される特許
1 - 20 / 91
ハイブリッド車両のエンジン始動制御装置
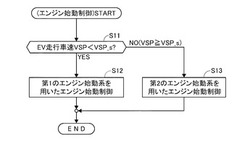
【課題】スタータモータによる低温時エンジン始動系の有効利用により、モータ/ジェネレータによるエンジン始動系のみを用いた場合よりも、モータ走行域を拡大可能にする。
【解決手段】EV走行中の車速VSPが設定VSP_s未満で、モータ/ジェネレータによるモータ走行が可能な低車速域である場合(S11)、このモータ/ジェネレータによる第1のエンジン始動系を用いたエンジン始動制御を行わせ(S12)、EV走行中の車速VSPが設定VSP_s以上で、モータ/ジェネレータによるモータ走行が不能な車速域である場合(S11)、このモータ/ジェネレータによる第1のエンジン始動系に代え、スタータモータによる第2のエンジン始動系を用いたエンジン始動制御を行わせる(S13)。これにより、VSP≧VSP_sでモータ/ジェネレータがエンジン始動トルクを賄う必要がなくなり、その分、モータ走行可能車速域が拡大され、モータ走行領域の拡大で燃費を向上させることができる。
(もっと読む)
車両用駆動装置

【課題】車速が高い状態においても内燃機関を適切に始動することが可能な車両用駆動装置を実現する。
【解決手段】第一回転電機の回転速度を、摩擦係合装置の2つの係合部材の間の回転速度差が小さくなる方向に変化させる差回転低減制御を実行する差回転低減制御部と、差回転低減制御の実行を条件に、非同期状態で摩擦係合装置を係合させる非同期係合制御を実行して直結係合状態とする係合制御部と、直結係合状態となったことを条件に、内燃機関を始動可能な回転速度Nfとする第一回転電機の回転速度Niを目標値として、第一回転電機の回転速度を変化させる始動制御部と、を備え、差回転低減制御部は、内燃機関の始動に必要とされる始動トルクを第一回転電機が出力可能な回転速度の範囲の上限値及び下限値Rminを限界として、第一回転電機の回転速度を変化させる。
(もっと読む)
車両制御装置
【課題】車両の前進走行中に後進走行が選択されたと誤って検出された場合におけるドライバビリティの低下を抑えることのできる車両制御装置を提供する。
【解決手段】この装置は、車両の後進走行時に車速SPDを所定速度V1以下に制限する車速制限制御を実行する。車速SPDが所定速度V1より高い所定速度V2以上である状況でシフト位置がR位置になったと判断されたときには(S101:YES、且つS102:NO)、車速制限制御の実行を禁止する(S103)。
(もっと読む)
車両用運転制御装置
【課題】
車両が駐車上に位置する場合や高速道路上を走行中の場合などの運転状況に応じて、アクセルペダルを誤って踏み込んだ際に生じる車両の急加速を防止する技術を提供する。
【解決手段】
車両1に搭載されるボディECU2は、位置検出部3、運転操作検出部5から通知される情報に基づき、現在の車両の運転状況を判断する。そして、ボディECU2は、アクセルペダルポジションセンサ51から通知される情報に基づき、アクセルペダルが急激に踏み込まれたと検出された場合、運転状況に応じてスロットルモータ4を制御し急加速を防止する。
(もっと読む)
田植機
【課題】所望の車速で走行することが容易に実現可能な田植機を提供する。
【解決手段】田植機1は、エンジン14と、モータ71と、変速ペダル67と、ペダル用ポテンショメータ67aと、を備え、ペダル用ポテンショメータ67aが出力するペダル信号に基づいてモータ71の目標駆動量を算出してモータ71の駆動量が前記目標駆動量になるようにモータ71を駆動することにより、車速を変速ペダル67の踏み込み量に対応した大きさに変更する、田植機1であって、最高速設定ダイヤル69を備え、前記目標駆動量を最高速設定ダイヤル69が出力するダイヤル信号に基づいて修正することで修正目標駆動量を算出して、モータ用ポテンショメータ71aの検出値が前記修正目標駆動量になるようにモータ71を駆動することにより、前記最高速度を最高速設定ダイヤル69の回動角に対応した大きさに変更する。
(もっと読む)
作業車両及び作業車両の制御方法
【課題】操作性の低下を抑えると共に、燃費低減の効果を向上させることができる作業車両及び作業車両の制御方法を提供する。
【解決手段】作業車両は、制御部10を備える。制御部10は、車両が低負荷状態であることを示す低負荷条件が満たされているか否かを判定する。制御部10は、低負荷条件が満たされているときには、エンジン21の出力トルクの上限値が、低負荷条件が満たされていないときよりも低減するように、エンジン21を制御する。また、制御部10は、検出された車速と、車両の加速度と、エンジン回転数の加速度とのうちの少なくとも1つと、検出されたエンジン回転数との変化に応じて、低負荷条件が満たされているときのエンジン21の出力トルクの上限値の低減量を変化させる。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】冷却装置の簡素化やモータの小型化を行ってコストダウンやコンパクト化を図りつつ、モータの保護も図ることが可能なハイブリッド車輌の制御装置を提供する。
【解決手段】エンジンEGの駆動回転によってモータMGが所定回転数以上で回転され、ゼロトルク制御手段21によりゼロトルクに制御されている場合にあって、モータMGの温度が温度上限閾値マップに基づく上限閾値以上となった際に、モータ保護制御手段40がエンジンEGの回転数を低下させる。即ち、モータMGの回転数が下げられ、ゼロトルク制御による発熱量が下がるので、モータMGの温度を下げることが可能となって、モータMGの保護が図られる。これにより、モータMGの冷却構造を高性能にしたり、モータMGを大型化したりすることを不要とし、ハイブリッド駆動装置HVのコストダウンやコンパクト化が図られる。
(もっと読む)
機能制限解除装置
【課題】運転者がどこでも車両機能を制限されることなく車両を走行させてしまうことを抑制する。
【解決手段】ナビゲーションユニット2が、通常は車両の速度リミッターを初期設定値V0に設定し、車両位置が速度制限解除エリア内に位置すると判別された場合、エンジン制御ユニット3を制御することにより速度制限を解除する。これにより、車両が速度制限解除エリア内に位置する場合においてのみ速度制限が解除されるので、運転者がどこでも速度制限されることなく車両を走行させてしまうことを抑制できる。
(もっと読む)
ハイブリッド式作業機械
【課題】ミニショベルのような小型の建設機械において、簡易なハイブリッド方式を採用することで燃費の向上、排ガス特性の改善及び騒音の低減を図り、かつ排出ガス規制をクリアできる安価なハイブリッド式作業機械を提供する。
【解決手段】エンジン出力馬力の制限値HELeが油圧ポンプ21のPQ馬力特性Dにより近接した設定とし、エンジン11をダウンサイジングする。走行高速時にバッテリ33により発電・電動機31を電動機として作動させて出力アシストを行う。バッテリ33の充電時は、トルク制御電磁弁44に制御信号を出力して減トルク制御を行い、エンジン11の余剰トルクを強制的に作り出し、急速充電を行う。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
車両の運転支援システム
【課題】運転者に対して適切な運転支援を実施する。
【解決手段】運転者による車両の運転を支援する運転支援システムであって、車両が停止したときに現在位置が既に停止区間として設定された区間内かを判定し、現在位置が停止区間内でなければ現在位置を停止基準位置としてその停止基準位置の前後の所定区間を停止区間とし、車両が停止区間内で停止したときは停止区間内の車速を停止区間用の走行データとして前記記憶装置に記憶し、車両が停止したときに現在位置が停止区間内であれば現在の停止位置から発進加速して停止区間を抜けるまでの区間については現在の停止位置と停止基準位置とを一致させた上で停止区間用の走行データとして記録されている過去車速に基づいて算出される停止区間基準車速よりも現在位置の車速が大きいかを判定し、現在位置の車速が停止区間基準車速よりも大きければ運転者に対して車速を抑えるための運転支援を行うことを特徴とする。
(もっと読む)
エンジンのフィルタ再生制御装置
【課題】エンジンのフィルタ再生制御装置において、フィルタ再生の頻度を高めるとともに、成功率の高い状態の判別をできるだけ簡素にしたシステムで実行することにある。
【解決手段】エンジン制御装置(5)に自動料金収受装置(3)の車載機(4)を通信可能に設け、車載機(4)が路側の自動料金収受装置(8)との通信に基づいて高速走行可能な道路への進入を検知した際にエンジン制御装置(5)へ信号出力し、エンジン制御装置(5)は車載機(4)からの高速走行可能な道路への進入を示す信号出力に基づいて強制的なフィルタ再生を開始する。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関の間欠運転を伴って走行可能なハイブリッド自動車において車両のエネルギ効率の向上を図る。
【解決手段】車速が大きいほど小さくなり且つバッテリの温度Tbが低いほど小さくなるように始動閾値Pstartおよび停止閾値Pstopを設定し、エンジンの運転を停止して走行いるときにエンジンに要求されるエンジン指令パワーが始動閾値Pstart以上に至ったときにはエンジンを自動始動してエンジンからの動力とモータからの動力とにより走行し、エンジンを運転して走行しているときにエンジン指令パワーが停止閾値Pstopを下回ったときにはエンジンを自動停止してモータからの動力により走行する。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、緊急車両が接近している場合に自車両を自動的に減速させるとともに、四輪車の場合にはアクセルペダルの踏み込み、二輪車の場合にはスロットルグリップの回転を制限させて、運転者に操作の違和感をなくすることにある。
【解決手段】制御手段(16)は、車車間通信手段(6)により緊急車両(3)の接近を検出する緊急車両検出手段(17)を備えて、この緊急車両検出手段(17)により緊急車両(3)が自車両(1)に接近することを検出した時に車速検出手段(8)により検出された車速が予め設定された値を超える場合には反力付与手段(11)を作動させて操作力調節手段(13)を調節して予め設定された車速になるように制御する。
(もっと読む)
トラクション制御装置
【課題】トラクション制御によって駆動輪の制御を行いながらも、必要なときには適宜、トラクション制御が制限でき運転者の意思どおりにエンジン駆動力を車両の駆動輪に付与できる安全性の高いトラクション制御装置を提供する。
【解決手段】車両の駆動源から駆動輪FR、FLに伝達される駆動力を制限するトラクション制御装置において、駆動源から出力される駆動力を制御するために操作されるアクセルの操作量を検知するアクセル操作量検出手段64と、アクセル操作量検出手段64からの出力に基づいてアクセル操作の振動状態を演算するアクセル振動演算手段65と、アクセル振動演算手段65により演算されたアクセル操作の振動状態が大きいほどトラクション制御が介入しにくくなるようにトラクション制御の制御内容を変更するトラクション制御変更手段66と、を備える。
(もっと読む)
車両運転システム
【課題】通常走行時の車両速度を学習し、エンジンが燃料を無駄に消費することを抑えられる車両運転システムを提供する。
【解決手段】車両の位置を検出する車両位置検出手段(GPSセンサ3)と、車両速度を検出する車両速度検出手段(車速センサ4)と、既に走行したことがある経路における車両の速度情報が記憶される記憶手段(記憶媒体8)と、現在の車両の位置における車両速度が記憶されている過去の車両速度の統計値(平均値X)に対して基準値以上に高い車両速度超過領域を判定する判定手段と、車両速度超過領域に入ったことを運転者に知らせる注意喚起手段及び車両速度超過領域にて車両速度を抑える車両速度制御手段の少なくとも一方と、を備える構成とした。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
速度制限制御装置、速度制限制御方法及び速度制限制御プログラム
【課題】センサ情報の誤差が生じることを考慮してエリア退場の判断を行う速度制限制御装置を提供することにある。
【解決手段】速度制限制御装置は、車両の現在位置情報と、保持しているエリア情報の入場用エリア範囲情報とを用いて、エリアに入場しているか否かを判断し、速度制限制御装置を搭載している車両が、エリアに入場した後に、エリア入場後の現在位置情報と、入場用エリア範囲情報を広げた範囲の退場用エリア範囲情報とを用いて、エリアから退場したか否かを判断し、エリアの入退場の状態によって速度制御の状態を変更している。速度制限制御装置は、エリア退場用の範囲情報を、エリア入場用の範囲情報に比して広く設定しているので、タイヤのスリップ等により現在位置情報に誤差が生じていても適切にエリアから退場したか否かを判断することができる。
(もっと読む)
ハイブリッド走行制御装置
【課題】動力循環を低減すると共に、エンジンの熱効率を悪化を低減することが可能なハイブリッド走行制御装置を提供する。
【解決手段】ハイブリッド車両(1)の走行制御を行うハイブリッド走行制御装置(10)において、燃費を優先するエンジン動作点及び回転電機の動作点がそれぞれ決められた走行モードで走行する燃費優先走行手段と、一方の回転電機(11)によって発電された電力の少なくとも一部が他方の回転電機(12)によって消費される動力循環状態になり易い高速巡航走行時に、バッテリ(21)の目標SOCを通常より高めに設定することで発電を行う回転電機(11)の回転数が0回転近傍になるように充電要求パワーを上乗せする充電制御手段と、を有する。
(もっと読む)
車両の駆動力制御装置
【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
1 - 20 / 91
[ Back to top ]