
Fターム[3G093EB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御対象(機関以外) (4,752) | 機関出力の伝動系、駆動系 (2,822) | 車輪に対するもの (2,377) | 変速機 (1,353)
Fターム[3G093EB03]に分類される特許
141 - 160 / 1,353
出力制限制御装置、ハイブリッド自動車および出力制限制御方法、並びにプログラム
【課題】出力制限を行いながら運転者のドライバビリティを向上させること。
【解決手段】運転者の所定の操作に応じて出力制限を解除または復帰させ、この出力制限の解除または復帰には、それぞれ所定の解除レートまたは所定の復帰レートが設定可能である出力制限制御部を有するハイブリッド自動車を構成する。
(もっと読む)
車両走行制御装置

【課題】パワートレインの制御に対する運転者の違和感を軽減する。
【解決手段】車両走行制御装置100は、車両に搭載されたエンジン51及び変速機52を含むパワートレイン5を制御する。また、車両走行制御装置100は、地図情報と対応付けて、道路の勾配値を示す勾配値情報を含む路面情報を予め格納する路面情報記憶部22と、過去の該車両の走行時に、該車両の運転者によって行われた操作を示す操作情報である操作履歴情報を、前記地図情報と対応付けて記憶する操作履歴記憶部23と、前記路面情報、及び、前記操作履歴情報に基づいて、パワートレイン5を制御する第1走行制御部111と、を備える。
(もっと読む)
ハイブリッド自動車
【課題】アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にする。
【解決手段】シフトポジションSPがBポジションでアクセルオフのときに、モータMG2の回生駆動によって生じる回生電力Pm2の積算値である回生電力積算値Pm2を計算すると共に(S210,S220)、エンジンのモータリングのためにモータMG1で消費されるモータリング電力Pm1の積算値であるモータリング電力積算値Pm1sumを計算し(S230,S240)、モータリング電力積算値Pm1sumと回生電力積算値Pm2sumとの和が正の値(電力消費側の値)のときには(S270)、シフト変更提案情報をディスプレイに表示出力する(S280)。これにより、シフトポジションSPのDポジションへのシフト変更を運転者に促すことができ、アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にすることができる。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップ制御の際に、自動変速機の変速歯車機構の係合側クラッチに作用させる油圧を適正に制御できるようにする。
【解決手段】エンジンの燃料カット中に変速歯車機構15の係合側クラッチ(例えばクラッチLC)に作用させる油圧を減少させて係合側クラッチを解放状態にする減圧制御を実行し、その後、エンジン再始動時に係合側クラッチに作用させる油圧を増加させて係合側クラッチを半係合状態にした後に係合状態に戻す増圧制御を実行する。更に、減圧制御中にクラッチ出力側回転速度(出力軸回転速度Noに1速の変速比を乗算した回転速度)と入力軸回転速度Ntとの回転速度差が所定値以上になった時点で、係合側クラッチが滑り始めたと判断して、そのときの油圧を基準油圧として学習し、減圧制御や増圧制御の際には、その基準油圧の学習値を基準にして係合側クラッチに作用させる油圧を制御する。
(もっと読む)
変速制御装置
【課題】変速プロセスにおいて、油圧制御が十分に応答できるように、回生トルク変動を規制することができる変速制御装置の提供。
【解決手段】駆動力源制御ユニットによってトルク出力が制御される回転電機から入力部材に入力される正トルク及び負トルクを算定する入力トルク算定部65と、負トルクの負方向への増加量を制限する負トルク増加量制限値を設定する負トルク制限値設定部64と、変速プロセスの間に入力トルク算定部65によって負トルクが算定された場合、回転電機が負トルク増加量制限値によって制限されたトルクを出力するように駆動力源制御ユニットに対してトルク出力制限指令を与える変速時トルク管理部63とを備える。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両用電動式ポンプの制御装置
【課題】エンジンで駆動される機械式ポンプを補助するために設けた電動式ポンプを、エンジン停止前から作動させても、過大な電流が流れることを抑制でき、かつ、流量のオーバーシュートを抑制できる制御装置を提供することを目的とする。
【解決手段】エンジンの停止前から、モータの印加電圧の操作によるモータ電流の制御によって電動式ポンプを作動させる。そして、エンジンの回転停止に伴う電動式ポンプへの移行段階を、エンジンの回転速度、モータの回転速度、電動式ポンプの吐出側に設けた一方向弁の下流側圧力などに基づいて判断すると、モータの印加電圧の操作によるモータ電流の制御から、モータの印加電圧の操作によるモータ回転速度の制御へと移行させる。
(もっと読む)
ハイブリッド車両の制御装置及び方法
【課題】非定常な運転状況において、運転点で最適に制御するハイブリッド車両の制御装置及び方法の提供。
【解決手段】運転要求検出部、運転点決定部、運転点補償部を含むハイブリッド車両の制御装置であって、その制御方法は、HEVモードで運転要求とバッテリーのSOCを検出する過程と、バッテリーがLow SOC状況であれば運転要求に応じてエンジンとモータの運転点を決定する過程と、運行地域の傾斜度(登坂条件)と大気圧(高地条件)を適用してエンジンとモータの運転点を補償する過程とを含む。
(もっと読む)
車両制御装置
【課題】運転者の意図に即した走行と燃費の向上を両立させることのできる車両制御装置を提供する。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化より遅くする指標設定手段(ステップS2)を有し、前記車両の駆動力源の出力を制御することに伴って、予め定めた範囲内で駆動力源の燃費エネルギ効率を変化させるように、前記指標に基づいて走行特性を補正設定するように構成された制御器(ステップS8)を備えている。
(もっと読む)
作業車両の駆動系制御装置
【課題】作業車両141において、過給機を用いることなくエンジン70の低回転域での出力トルクを確保して、エンジン70のダウンサイジングを可能にする。
【解決手段】走行機体142に搭載されたエンジン70と、該エンジン70に燃料を噴射するコモンレール式の燃料噴射装置117と、前記エンジン70からの動力を変速する無段変速機159とを備える作業車両141において、前記エンジン70の回転速度Nを2種類N#1,N#2のみに限定する。そして、前記エンジン70の回転速度Nを前記2種類N#1,N#2のいずれに変更しても、変更前後で前記走行機体142の車速を変更しないように、前記無段変速機159の変速比を変更調節する。
(もっと読む)
作業車両の駆動系制御装置
【課題】作業車両141において、低速走行しながらの各種作業中に排気ガス浄化装置50を強制再生させることなく、前記排気ガス浄化装置50の詰りを解消できるようにする。
【解決手段】走行機体142に搭載されたエンジン70と、該エンジン70に燃料を噴射するコモンレール式の燃料噴射装置117と、前記エンジン70からの動力を変速する無段変速機159と、前記エンジン70の排気系に配置された排気ガス浄化装置50とを備える作業車両141において、前記エンジン70の回転速度N及びトルクTに関するエンジン運転点Qが、前記排気ガス浄化装置50を自己再生できない低速低トルク側にある場合は、前記排気ガス浄化装置50の自己再生が可能な高速低トルク側に前記エンジン運転点Qを移行させると共に、前記走行機体142の車速Vを変更しないように前記無段変速機159の変速比を変更調節する。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
車両用走行制御装置
【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
水田作業機
【課題】操作者に無用な混乱を生じさせることなく良好に、人為操作に基づいてエンジン自動停止処理及びエンジン自動始動処理を実行することが可能となる水田作業機を提供する。
【解決手段】エンジンを搭載した走行機体3に機体各部の作動を制御する制御手段が備えられ、制御手段が、キースイッチがオン操作されている状態において、キースイッチ以外の操作具であり且つ異なる2つの操作具52,53のうちのいずれか一方の操作具53のエンジン停止用の操作に伴って、エンジン自動停止処理を実行し、2つの操作具52,53のうちの他方の操作具52のエンジン始動用の操作に伴って、エンジン自動始動処理を実行するように構成されている。
(もっと読む)
車両用エンジン回転制御装置
【課題】車両の動力伝達装置に含まれる変速機の変速制御とエンジンの始動制御とが重なる場合において、運転者の意図に応じたエンジンの始動を可能にする車両用エンジン回転制御装置を提供する
【解決手段】変速制御およびエンジン始動制御の実行判断が重なった場合において(SA1およびSA2が肯定)、運転者の駆動力変化要求がある場合には(SA3が肯定)、エンジン始動方法が変更され、かつ、エンジン始動制御と変速制御のいずれか一方の実行中であっても他方が実行され、駆動力変化を速やかに出力する(SA4)。一方運転者の駆動力変化要求がない場合には(SA3が否定)、エンジン始動制御と変速制御のいずれか一方が実行され、その実行後に他方が実行されることにより、ショックが低減される(SA5)。これにより、運転者の意図に応じたエンジン始動制御が実現される。
(もっと読む)
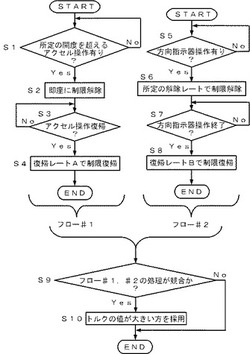
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
コーストストップ車両及びコーストストップ方法
【課題】ベルト式無段変速機構(バリエータ)を備えた車両において、コーストストップ実行時のベルト滑りを抑制する。
【解決手段】
コントローラ12は、コーストストップ条件の成否を判断し、コーストストップ条件が成立したと判断された場合に、Lowブレーキ32への供給油圧を低下させ、Lowブレーキ32に供給される油圧を低下させた後にエンジン1及びメカオイルポンプ10mを停止させ、これによってLowブレーキ32への供給油圧をさらに低下させてLowブレーキ32を解放する。
(もっと読む)
車両用制御装置
【課題】オルタネータ26及びコンプレッサ30の駆動に伴うエンジン10の燃料消費量の増大量の少ない動作点(最適動作点)へとエンジン10の現在の動作点を自動変速装置18の変速比の操作によって移行させる場合、オルタネータ26等の駆動に伴うエンジン10の燃料消費量が増大するおそれがあること。
【解決手段】エンジン回転速度、オルタネータトルク及びコンプレッサトルクのそれぞれを互いに相違する複数の値に仮設定しつつ想定電費及び想定熱費を算出する。そして、想定電費及び想定熱費が許容上限値以下となること等を条件として、最適動作点でエンジン10を運転させるためのオルタネータトルク、コンプレッサトルク及びエンジン回転速度の目標値を算出する。そして、算出された目標値に基づく通電信号をオルタネータ26、コンプレッサ30及び変速制御用ECU52に同時に出力する処理を行う。
(もっと読む)
車両の制御装置
【課題】減筒運転した状態で前後進を切り替えた場合に、エンジンストールを確実に抑制することが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、車両に搭載され、エンジンと、制御手段とを備える。エンジンは、複数の気筒を備える。制御手段は、気筒の少なくとも一部を休止させた減筒運転状態で、車両の前進と後進との切り替えに基づいて、エンジンと車両の駆動軸との動力伝達の係合圧力を低下させ、少なくとも一部の休止気筒の復帰を実行する。
(もっと読む)
内燃機関の制御方法
【課題】 内燃機関の制御方法を提供する。
【解決手段】 運転状態に依存して始動および停止可能である、駆動トレインを備えた内燃機関を制御するための方法が提案される。この場合、入力信号が制御装置で検出および監視される。ブレーキの操作が確認されると、内燃機関の回転数がアイドリング回転数に達したかどうかを監視される。アイドリング回転数に達し、かつブレーキが操作されると、制御装置は起こり得る停止拒否の存在を調べ、停止拒否が確認されない場合に、駆動トレインが停止させられる。
(もっと読む)
141 - 160 / 1,353
[ Back to top ]