
Fターム[3J552SB06]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 変速比,変速時期 (4,490) | 変速比(ギヤ比) (3,054) | 変速比の選択,変更 (2,267) | 特定変速比 (533) | エンジンブレーキ変速比 (52)
Fターム[3J552SB06]に分類される特許
1 - 20 / 52
車両のエンジンブレーキ制御装置
【課題】 通常モード以外に運転者の意図を反映可能な他の操作モードを備えている車両で、簡単な操作で走行状態に応じて最適なエンジンブレーキ力を得るエンジンブレーキ制御装置を提案する。
【解決手段】 エンジンと無段変速機とが搭載される車両のエンジンブレーキ制御装置であって、車両の車速に応じて変速比を無段階に特定してある基準線を規定して、エンジンブレーキ力を発生させるときの初期エンジンブレーキ力を設定する初期エンジンブレーキ力設定手段と、運転操作に基づいて運転者のエンジンブレーキ要求の意図を確認したときの車両の車速と基準線とにより特定される初期エンジンブレーキ力を始点としてエンジンブレーキ力の目標線を設定してエンジンブレーキ制御を実行する制御手段とを備えた。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法

【課題】運転者のブレーキ操作を支援し、操作負担を軽減する。
【解決手段】車両の駆動源を被動側から駆動される状態にして車両に減速度を与えるエンジンブレーキを備え、運転者がブレーキ操作量を保持したときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、運転者がブレーキ操作量を増減させている、つまりブレーキ操作量を保持していないときには、エンジンブレーキによる減速度を保持させる。また、エンジンブレーキによる減速度を上限値GLIM以下に制限する。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法
【課題】運転者のブレーキ操作を支援しつつ、減速度の変動を抑制する。
【解決手段】運転者がブレーキ操作を行ったときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、エンジン被動側の動力伝達状態が、定常状態から低減し、その後、再び定常状態へと復帰したら、減速度の増加率を減少補正する。変速機の変速位置がDレンジからNレンジへ変化したことを検出したときに、動力伝達状態が定常状態から低減したと判断する。また、その後、変速位置がNレンジからDレンジへと復帰したことを検出したときに、再び定常状態へ復帰したと判断する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第1電動機、第2電動機、及び自動変速機を備えたハイブリッド車両におけるコーストダウン変速を好適化するハイブリッド車両の制御装置を提供する。
【解決手段】コーストダウン変速に際して、第1電動機MG1により反力トルクを発生させることでその変速を進行させるものであることから、変速時間を増加させることなく電力収支を成立させることができる。すなわち、第1電動機MG1、第2電動機MG2、及び自動変速部20を備えたハイブリッド車両におけるコーストダウン変速を好適化するハイブリッド車両の制御装置を提供することができる。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
変速制御装置及び変速制御方法
【課題】回生効率を向上させることが可能な変速制御装置及び変速制御方法を提供する。
【解決手段】動作制御装置10は、エンジンとモータ3とが第1クラッチ4を介して接続され、モータ3と駆動輪との間に無段変速機構5が配置されたハイブリッド車両に搭載されるものである。この動作制御装置10は、車両減速時に第1クラッチ4を切断して回生する場合、無段変速機構5の伝達効率及びモータ3の発電効率の少なくとも一方に基づいて変速制御を実行する第1変速制御部12と、車両減速時に第1クラッチ4を締結して回生する場合、第1変速制御部12による変速制御の実行時より、無段変速機構5の変速比を小さくする変速制御を実行する第2変速制御部13と、を備えている。
(もっと読む)
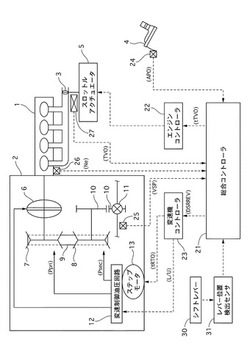
車両用無段変速機の変速制御装置
【課題】アクセル戻し操作時に変速比を固定する場合に、急に大きな動力源ブレーキが発生してショックが生じたり意図した以上の減速Gが発生したりすることを防止する。
【解決手段】ベルト式無段変速機18を固定変速比γsに固定する際に、固定変速比γsに対応する変速比固定入力回転速度Nins まで入力回転速度Ninを低下させるように変速機18をアップシフトした後(P1→P2変速)、その固定変速比γs に変速機18を固定する(矢印b)。このため、アクセル戻し操作直前の変速比γをそのまま維持する場合(矢印c)に比較してアップシフト分だけエンジン回転速度NEが低くなり、エンジンブレーキが低減されて運転者が意図した以上の減速Gが発生することが抑制される。また、アップシフトによるエンジン回転速度NEの低下で駆動方向のイナーシャが発生し、エンジンブレーキが緩和(相殺)されてショックが抑制される。
(もっと読む)
車両制御システム
【課題】適正に燃費性能を向上させることができる車両制御システムを提供することを目的とする。
【解決手段】車両制御システム1は、内燃機関4と、動力伝達装置5と、車両2の走行速度と車両2が走行する走行路の勾配とに基づいて内燃機関4及び動力伝達装置5を制御し、第1惰性走行制御と第2惰性走行制御とを切り替える制御装置9とを備え、制御装置9は、車両2の走行速度が所定速度以下であり、上り勾配を正、下り勾配を負とした場合の走行路の勾配が、第1惰性走行制御を実行した場合に車両2が減速し、かつ、第2惰性走行制御を実行した場合に車両2が所定加速度より大きな加速度で加速する大きさの勾配である場合に、第2惰性走行制御を禁止し、第1惰性走行制御を許可することを特徴とする。したがって、車両制御システム1は、適正に燃費性能を向上させることができる、という効果を奏する。
(もっと読む)
車両制御装置
【課題】負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供すること。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
(もっと読む)
車両の制御装置
【課題】負圧回復制御を通じて負圧が確保されたときに、運転者が予期していないタイミングにおいて変速段の変更が実行されることを抑制することのできる車両の制御装置を提供する。
【解決手段】本願発明に係る車両の制御装置である電子制御装置100は、ブレーキブースタ30の機能を十分に発揮させるために必要とされる負圧が確保できていないときに、自動変速機20の変速段を、変速制御を通じて選択される変速段よりも変速比の大きな変速段に変更する負圧回復制御を実行する。電子制御装置100は、負圧回復制御を通じて負圧が確保できるようになった場合であってもアクセルペダル40が操作されるまで負圧回復制御を継続させ、アクセルペダル40が操作されたときに負圧回復制御を終了させる。
(もっと読む)
車両用変速制御装置
【課題】アクセルオフ操作時に常に最適ギヤ比へのシフトダウンを行って適切なエンジンブレーキ作用を発生できる車両用変速制御装置を提供する。
【解決手段】補助ブレーキ切換スイッチの切換位置及び車速Vに基づき、目標制動力算出部31で実際に発生させるべき目標制動力tgtBを具体的に算出し、その目標制動力tgtBを達成可能な目標ギヤ段tgtGを目標ギヤ段算出部32で算出してシフトダウンを行う。目標制動力tgtBの算出時には、スイッチ切換位置がSDB弱位置のときに比較してSDB強位置ではより大きな目標制動力tgtBを算出し、より低ギヤ側の目標ギヤ段tgtGにシフトダウンすることによりエンジンブレーキ作用を高める。
(もっと読む)
建設機械及びその制御方法
【課題】満充電時でも発進し極低速で走行可能な建設機械及びその制御方法を提供する。
【解決手段】蓄電器14に接続された電動発電機11と、エンジン10とを備え、それらの出力が遊星ギヤ装置により合成されて駆動輪20へと伝達される建設機械1において、遊星ギヤ装置は、エンジン10の運転中に駆動輪20側への出力回転数が零になる場合に電動発電機11が逆回転するように構成し、遊星ギヤ装置と駆動輪20との間には変速機12を介設する。アクセル開度、車速、蓄電器14の蓄電量等に基づいてエンジン10、電動発電機11及び変速機12を制御する制御装置2を備える。蓄電器14の蓄電量が所定量以上に多く、停車乃至極低速状態でアクセルが踏み込まれていれば、制御装置2により、変速機12の前後進を進行方向と逆向きに切替えるとともに、電動発電機11に逆トルクを発生させることによって力行状態とする。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
作業車両
【課題】簡易な構成により、作業機接続に伴って制動力が付加されて路上等における移動走行の際の安定走行を確保することができる作業車両を提供する。
【解決手段】作業車両は、作業機(F)を接続するヒッチ(H)と、走行伝動系に介設して摩擦ローラ(5)によって無段階の変速比で動力を伝達するトロイダル無段変速伝動部(4)と、その変速比を制御することによりアクセルペダル(N)の踏込みに応じた目標車速まで駆動制御するとともに、アクセルペダル(N)を戻した時に所定の逆トルクによる制動制御をする制御部(G)とを備えて構成され、上記ヒッチ(H)には、作業機(F)の接続を検出する接続センサ(R)を設け、その検出信号を受けて上記逆トルクを所定の倍率で増加する係数切替制御を上記制御部(G)に設けたものである。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
ハイブリッド電気自動車の変速制御装置
【課題】電動機による回生制動を行う車両減速時において、駆動輪側からの駆動力を電動機に伝達している第1歯車機構を低速ギヤ側の変速段に切り換えるプリセレクトを実行すべく、電動機の回生トルクを減少させたときの減速抵抗の一時的な消失を抑制できるハイブリッド電気自動車の変速制御装置を提供することにある。
【解決手段】車両減速に伴う回生制動の実行時に第1歯車機構G1のプリセレクト要求があったとき、電動機2の回生トルクを減少させ、この回生トルクの減少に対応してインナクラッチ22を接続する。これにより電動機2の回生トルクに代えてエンジンブレーキを駆動輪5に作用させて、減速抵抗の一時的な消失を軽減する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】複数の変速比が段階的に成立させられる変速部と変速部の入力側回転部材に動力伝達可能に連結された電動機とを備える車両用動力伝達装置において、コーストダウンシフトを適切なタイミングで実行することでコーストダウンシフト時の変速部の入力トルクの変化を抑制して変速ショックを抑制する。
【解決手段】減速走行中に第2電動機M2による回生トルクを含む自動変速部20の入力トルクTINが零と判断されることを条件として自動変速部20のコーストダウンシフトが実行されるので、コーストダウンシフトの際は自動変速部20の入力トルクTINが零と判断されるトルク値とされており、コーストダウンシフト完了時に自動変速部20の出力側に表れるトルク変化が可及的に抑制される。このように、自動変速部20の変速を入力トルクTINが零と判断されるときに実行することで、変速時の入力トルクTINの変化が抑制されて変速ショックが抑制される。
(もっと読む)
車両の自動フリーホイーリング機能を制御する方法及び装置
本発明は、現行のフリーホイーリング状態によりフリーホイーリング機能が起動される車両の自動フリーホイーリング機能を制御する方法及び装置であって、制御ユニットは、前記車両が間もなく、現行の下り坂と比較して更に険しい下り坂(図2の位置Bの下)を走行することを予測し、前記車両が前記更に険しい下り坂に入る前に前記フリーホイーリング機能の作動が位置D(位置Bの上)で停止した場合、前記車両が前記フリーホイーリング機能の作動状態で前記更に険しい下り坂に入った場合と比較して、燃料消費がより少ないか否かをシミュレートし、前記シミュレーションによってより少ない燃料が消費されることが示された場合は、フリーホイーリング機能の作動は前記位置Dで、すなわち前記車両が前記更に険しい下り坂に入る前に停止するようにプログラムされている、方法及び装置に関する。 (もっと読む)
車両の変速制御装置
【課題】 ダウンシフト直前の車速にかかわらず適度な減速感を得ることができ、ドライバに与える違和感を軽減できる車両の変速制御装置を提供する。
【解決手段】 車両前方の減速対象を検出するナビゲーションシステム13と、エンジン1と左右前輪5a,5bとの間に介装したCVT2と、検出された減速対象に応じた目標減速度Gtを算出し、自車と減速対象との距離Lnが距離閾値Lt以下となったとき、目標減速度Gtに応じてCVT2の変速比をダウンシフト側へ変更するCVTコントローラ6と、を備え、CVTコントローラ6は、目標減速度がGt高いほど距離閾値Ltを増加させる。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】車両の制動力を制御することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】変速機10を介して第一駆動輪12に接続するエンジン2のエンジンブレーキにより、第一駆動輪12に制動力を付加するとともに、第二駆動輪20に接続する第二モータ6の回生制動により、第二駆動輪20に制動力を付加して車両Cの制動力を制御する際に、第二モータ6の回生制動により第二モータ6が発電した発電電力を、エンジン2の駆動軸を駆動可能な第一モータ4に供給して第一モータ4を駆動させ、この駆動させた第一モータ4の駆動トルクが増加するほど、変速機10の変速比が増加するように、変速機10の変速比を制御する。
(もっと読む)
1 - 20 / 52
[ Back to top ]